







按照我们的初级进阶之路,位置搞定了,下一步该是速度了。
速度可以表示为位置的微分形式,所以对机器人的微分运动分析就可以进行速度分析。
雅可比矩阵
首先我们求速度,一般指的是机械臂端部的速度。所以对端部位姿求微分,可写为
对其求时间微分,等式右边对关节变量
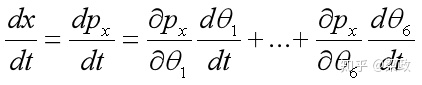
去掉dt,可得
按照我们的初级进阶之路,位置搞定了,下一步该是速度了。
速度可以表示为位置的微分形式,所以对机器人的微分运动分析就可以进行速度分析。
首先我们求速度,一般指的是机械臂端部的速度。所以对端部位姿求微分,可写为
对其求时间微分,等式右边对关节变量
去掉dt,可得











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2689
2689





