




简介:ROS是一个为机器人软件开发提供的开源框架,而Velodyne激光雷达是提供精确3D点云数据的高级传感器。本文将指导如何在ROS环境下配置Velodyne激光雷达驱动,并提供安装、参数配置、数据发布、点云处理、可视化以及应用示例等实战内容。掌握这些技能对机器人领域的研究和开发至关重要,可以有效利用Velodyne激光雷达进行导航、地图创建、障碍物检测、避障和定位等任务。
1. ROS简介与环境配置
1.1 ROS的概述
机器人操作系统(Robot Operating System, ROS)是一种用于编写机器人软件的灵活框架,它提供了操作各种硬件组件所需的工具和库函数。ROS被设计成类似操作系统的形式,但实质上它只提供了一个运行时环境和一系列已经开发好的库函数,允许开发者更快速地编写和测试复杂的机器人行为,而无需从零开始构建每一个组件。
1.2 ROS的核心特性
ROS具有模块化设计,提供了进程间通信机制,并支持分布式处理。其核心概念包括包(Packages)、节点(Nodes)、消息(Messages)、话题(Topics)、服务(Services)和参数服务器(Parameter Server)。这些特性共同支持了大规模协作式机器人软件的开发。
1.3 环境配置步骤
在开始开发之前,首先需要设置ROS环境。对于Ubuntu系统,这通常涉及安装ROS发行版,创建ROS工作空间,并配置环境变量。以下是一个基本的安装流程:
# 添加ROS的软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加密钥
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
# 更新软件源并安装ROS
sudo apt-get update
sudo apt-get install ros-<ros_version>-ros-base
# 初始化环境变量
echo "source /opt/ros/<ros_version>/setup.bash" >> ~/.bashrc
source ~/.bashrc
记得替换 <ros_version> 为你要安装的ROS版本,如 melodic 。安装完成后,你需要配置ROS环境变量,并初始化rosdep,以安装系统依赖项:
# 安装rosdep
sudo apt-get install python-rosdep
# 初始化rosdep
sudo rosdep init
rosdep update
# 创建ROS工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
至此,你已经为ROS开发准备好了环境。接下来可以开始安装和运行ROS程序了。
2. Velodyne激光雷达介绍
2.1 Velodyne激光雷达产品概述
激光雷达(Light Detection and Ranging,LIDAR),作为一种主动遥感技术,通过发射激光脉冲并接收反射信号来测量目标物体的精确距离。Velodyne公司的激光雷达产品在自动驾驶、机器人导航、三维扫描和安全监测等领域得到了广泛应用。其中,Velodyne的激光雷达以其高精度、高可靠性和宽视场角成为该领域的佼佼者。
2.1.1 各型号激光雷达的功能与特点
Velodyne提供不同型号的激光雷达,以满足不同的应用场景需求。例如,Velodyne PUCK VLP-16具有轻巧的体积、较低的功耗和16条激光通道,非常适合无人机或机器人。而Velodyne ULTRA PUCK VLP-32C则拥有32条激光通道和更远的探测距离,适用于汽车、卡车和大型车辆。
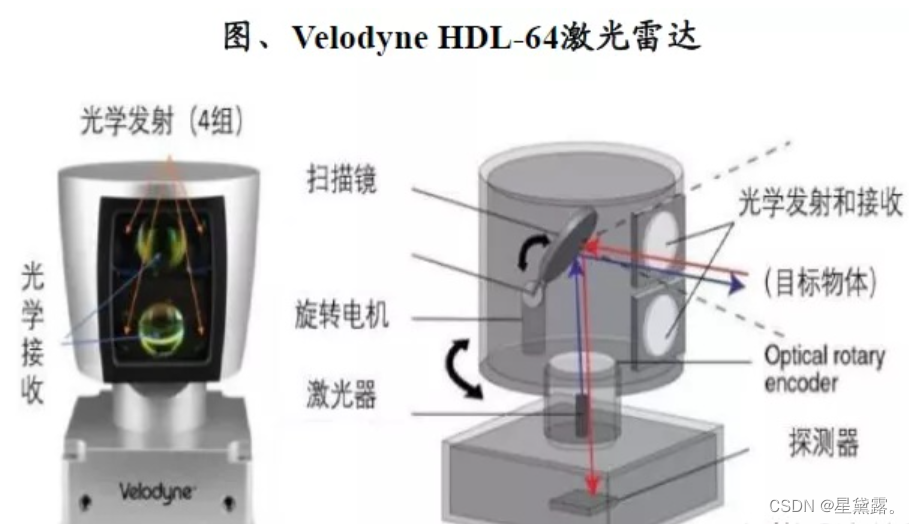
2.1.2 激光雷达工作原理
激光雷达工作原理基于光的飞行时间(Time of Flight,ToF)测量。通过测量激光脉冲发射到被物体反射回的时间,可以计算出物体与雷达之间的距离。Velodyne激光雷达使用固态旋转设计,能够实现高精度、高速度的360度环境扫描。
2.2 Velodyne激光雷达数据特性
激光雷达在扫描过程中会生成海量点云数据,这些数据的处理和解析对于后续的应用至关重要。
2.2.1 数据输出格式
Velodyne激光雷达输出的数据格式主要为PCAP包或二进制文件。PCAP格式提供了帧级别的数据包,适用于需要详尽原始数据进行分析的场合;而二进制格式则针对点云数据进行了优化,便于实时处理和传输。
2.2.2 数据分辨率和扫描范围
分辨率是决定激光雷达数据质量的关键因素之一,而扫描范围决定了激光雷达的视场覆盖能力。Velodyne的激光雷达可以提供从16条到64条激光通道的配置,以适应不同的分辨率需求。同时,其水平和垂直扫描范围也根据不同的产品型号而有所变化,从30度到40度的垂直视场角不等。
在接下来的章节中,我们将深入了解如何在Ubuntu系统中安装和配置ROS环境,以及Velodyne激光雷达的ROS驱动安装步骤和参数配置指南。
3. Velodyne ROS驱动安装步骤
3.1 环境准备与依赖安装
3.1.1 Ubuntu系统与ROS的安装
在开始安装Velodyne ROS驱动之前,确保你的系统环境是兼容的。Velodyne ROS驱动是基于ROS(Robot Operating System)平台开发的,因此,首先需要在Ubuntu系统上安装ROS。Ubuntu是一个广泛用于机器人开发的Linux发行版,而ROS是机器人开发中广泛使用的一套框架和工具集。以下是安装Ubuntu和ROS的步骤:
- 下载Ubuntu操作系统安装镜像,并使用一个USB驱动器创建一个可启动的安装盘。
- 在目标计算机上启动并安装Ubuntu系统。
- 安装完成后,更新系统的软件包索引,运行以下命令:
sudo apt-get update
sudo apt-get upgrade
接下来,安装ROS。选择适合你的Ubuntu版本的ROS版本进行安装。例如,对于Ubuntu 20.04,可以使用以下命令安装ROS Noetic:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
sudo apt-get install ros-noetic-desktop-full
安装完成后,初始化ROS环境并设置环境变量:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
3.1.2 必要依赖库的安装
Velodyne ROS驱动依赖于一些其他的库,如 libyaml-cpp-dev 和 python-rosdep 等。以下是安装这些必要依赖库的命令:
sudo apt-get install python-rosdep python-catkin-tools libyaml-cpp-dev
确保 rosdep 可以正常工作,这是ROS安装系统依赖的工具。初始化 rosdep ,然后更新:
sudo rosdep init
rosdep update
最后,创建一个新的ROS工作空间,并初始化 catkin 构建系统:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin init
catkin config --extend /opt/ros/noetic --merge-devel --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
3.2 ROS驱动安装过程详解
3.2.1 驱动包下载与解压
为了安装Velodyne ROS驱动,首先需要下载Velodyne提供的ROS驱动包。这可以通过Git获取最新的代码库:
cd ~/catkin_ws/src
git clone https://github.com/velodyne/velodyne_ws.git
一旦下载完成,需要将下载的仓库中的文件解压到工作空间的 src 目录下:
cd ~/catkin_ws/src/velodyne_ws
unzip master.zip
3.2.2 编译与安装
在编译之前,确保所有依赖都已正确安装,并更新 rosdep :
cd ~/catkin_ws
rosdep install --from-paths src --ignore-src --rosdistro noetic -y
接下来,编译ROS工作空间,这里使用 catkin_make 命令:
catkin_make
3.2.3 验证驱动安装
驱动安装完成后,需要验证驱动是否正确安装,并且可以正常工作。可以通过source设置环境变量来加载你的ROS工作空间:
source ~/catkin_ws/devel/setup.bash
然后,尝试启动Velodyne的测试节点以验证驱动工作状态:
roslaunch velodyne_pointcloud VLP16_points.launch
这个命令将启动一个ROS节点,该节点负责与Velodyne激光雷达通信,并将点云数据发布到ROS话题上。如果一切正常,你将看到激光雷达扫描的数据在控制台中被打印出来。
3.3 进阶配置与故障排查
3.3.1 进阶配置
在某些情况下,可能需要对Velodyne驱动进行进阶配置。例如,如果需要调整激光雷达的IP地址或者端口号,或者需要设定不同的扫描参数,可以编辑Velodyne驱动配置文件。
假设驱动已经启动,编辑配置文件:
rosed velodyne_pointcloud velodyne_client_config.launch
在打开的配置文件中,你可以修改IP地址或端口号:
<param name="host" value="192.168.1.201" />
<param name="port" value="2368" />
然后保存并重启驱动节点,以确保新的设置生效。
3.3.2 故障排查
如果遇到问题,故障排查是解决问题的重要步骤。首先,确保驱动依赖的库已经正确安装,并且没有版本冲突。检查ROS日志,以寻找可能的错误信息:
roslaunch velodyne_pointcloud VLP16_points.launch
roslog | grep "velodyne"
检查错误日志是否有特别的信息,例如端口冲突、网络问题或权限问题。同时,查看激光雷达硬件状态,确认激光雷达自身无故障。
如果上述方法不能解决问题,可以尝试搜索Velodyne社区论坛、GitHub项目页面的问题跟踪器,或者直接联系Velodyne的技术支持,以获取帮助。
为了更有效地帮助别人或记录问题,可以考虑将错误日志以及ROS节点的详细描述打包上传。这将有助于问题的快速解决,并且可以作为一个记录,防止未来类似问题再次发生。
4. Velodyne参数配置指南
随着激光雷达技术在机器人和自动驾驶领域的广泛应用,对Velodyne雷达的精确配置和调优变得至关重要。本章节将深入解析Velodyne激光雷达在ROS环境下的参数配置方法,涵盖基本参数配置、高级设置项详解以及实时参数调整等实用技巧。
4.1 配置文件解析
4.1.1 基本参数配置
Velodyne雷达的基本参数通常包含IP地址、端口、回波模式等,这些参数是驱动正常运行的前提条件。配置文件一般位于 ~/.ros/velodyne_params.yaml ,或者在启动节点时指定。
# Example of velodyne_params.yaml
model: "VLP16"
ip_address: "192.168.1.201"
rotation_frequency: 5.5 # Hz
frame_id: "velodyne"
在这个示例中, model 定义了雷达型号, ip_address 是雷达的IP地址, rotation_frequency 表示雷达旋转频率, frame_id 是雷达数据在ROS框架中的命名空间。
4.1.2 高级设置项详解
高级设置项能够为特定的应用场景提供更细粒度的控制。例如,在高反射环境下,通过调整 ring 参数可以减少或增加特定环的反射点。
# Advanced settings for high reflection environments
ring:
- 0 # Ring number (0 for the first ring)
- 1
- 2
- ...
- 15 # Last ring for VLP16
range_min: 0.9 # Minimum range threshold
range_max: 100.0 # Maximum range threshold
ring 数组中的值表示要调节的环数, range_min 和 range_max 可以设定距离阈值,过滤掉超出阈值范围的反射点。
4.2 实时参数调整
4.2.1 ROS参数服务器的使用
ROS参数服务器允许用户通过动态重新配置参数而无需重启节点。这对于需要实时调整的场合非常有用。例如,可以在运行时改变雷达的转速,而无需中断激光雷达的数据流。
rosrun rqt_reconfigure rqt_reconfigure
在 rqt_reconfigure 界面,可以看到Velodyne驱动的参数列表,并可以动态调整。
4.2.2 动态调整参数的示例
为了实现动态调整雷达扫描频率,可以使用ROS的命令行工具进行如下操作:
rosparam set /node_name/rotation_frequency 10.0
执行这条指令,将会把 rotation_frequency 参数的值从原来的5.5 Hz修改为10 Hz,从而加快雷达的扫描速度。
以上内容对Velodyne参数配置进行了系统的介绍,从基本参数配置到高级设置项详解,再到实时参数动态调整,无一不体现着精细调校的必要性。配置的精确度往往直接影响到激光雷达数据的质量,因此本章节的技巧和方法是任何深入使用Velodyne激光雷达的工程师不可或缺的知识储备。在下一章节中,我们将进一步探讨Velodyne数据发布细节,为您揭密如何在ROS环境下处理和利用激光雷达数据。
5. Velodyne数据发布细节
在现代机器人技术和自动化系统中,激光雷达传感器已成为收集和处理环境信息的重要设备。Velodyne提供的一系列激光雷达,如VLP-16、HDL-32E、VLP-32C等,通过ROS(Robot Operating System)集成,已成为行业标准解决方案。了解和掌握这些设备的数据发布机制、同步与质量控制是至关重要的。本章将详细介绍Velodyne在ROS中的数据发布细节,并讨论数据同步与质量控制的相关策略。
5.1 数据发布机制
5.1.1 ROS消息类型介绍
ROS中,Velodyne的数据通常是通过特定的消息类型进行发布的。对于激光雷达数据,其对应的消息类型为 sensor_msgs/LaserScan 或 sensor_msgs/PointCloud2 。消息类型 LaserScan 适用于环形激光雷达,它可以表示一圈扫过的激光数据。而 PointCloud2 则用于表示三维点云数据,适用于所有类型的激光雷达传感器。
sensor_msgs/LaserScan消息类型
-
header: 包含帧信息的通用消息头。 -
angle_min和angle_max: 定义了激光扫描的最小和最大角度。 -
angle_increment: 扫描中每个读数的角分辨率。 -
time_increment: 对于每个点的时间增量(不适用于所有传感器)。 -
scan_time: 完成一次扫描所需的时间。 -
range_min和range_max: 距离传感器最近和最远的测量范围。 -
ranges: 存储每个角度测量到的距离值。
sensor_msgs/PointCloud2消息类型
-
header: 包含帧信息的通用消息头。 -
height和width: 点云的高度和宽度(对于非栅格化的点云,高度可为1)。 -
fields: 描述点云中每个点的字段列表(如x, y, z, intensity等)。 -
point_step: 从一个点到下一个点的字节偏移量。 -
row_step: 从一行到下一行的字节偏移量。 -
data: 以二进制形式存储点云数据。 -
is_bigendian: 字节序标识。 -
point_step: 点数据中每个点的字节长度。 -
is_dense: 标识点云是否包含无效点(如NaN值)。
这些消息类型在ROS中被广泛使用,并且是传感器数据交换的基础。理解这些消息类型对于正确处理和使用Velodyne数据至关重要。
5.1.2 激光雷达数据流的处理
处理Velodyne激光雷达数据流首先需要订阅相应的ROS话题(topics),这些话题通过 sensor_msgs 消息类型发布数据。通常,有两种方式来处理激光雷达数据:同步和异步。同步处理是指在接收数据后立即进行处理,而异步处理则是在后台线程或进程上处理数据,这允许系统对实时数据流的连续处理。
为了处理激光雷达数据,可以使用 rospy (Python)或 roscpp (C++)编写ROS节点。下面是一个简单的例子,展示了如何使用 rospy 订阅激光雷达数据并打印出来:
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
def scan_callback(msg):
rospy.loginfo("Received a laser scan with range_MIN: %f, range_MAX: %f", msg.range_min, msg.range_max)
rospy.init_node('laser_scan_listener', anonymous=True)
rospy.Subscriber('/scan', LaserScan, scan_callback)
rospy.spin() # Keep the script running
在ROS中,节点是数据处理的基本单位。通过创建节点并在节点中订阅主题,我们可以接收到激光雷达发布的数据。 rospy.Subscriber 方法用于订阅特定的话题,并指定了当有新的消息到达时应当调用的回调函数。
5.2 数据同步与质量控制
5.2.1 时间戳同步策略
激光雷达与其他传感器(如IMU、相机等)进行数据融合时,时间戳同步是至关重要的。为了确保数据的准确性,需要准确的时间戳同步。ROS提供了一些工具来帮助同步不同传感器的时间戳,例如 rosbag 同步工具和 message_filters 包。
使用 message_filters 可以实现多个传感器数据的时间戳同步。以下是一个使用 message_filters 来同步激光雷达数据和图像数据的例子:
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Image, LaserScan
from message_filters import TimeSynchronizer, Subscriber
def sync_callback(laser_scan, image):
# 处理同步后的数据
pass
rospy.init_node('sync_node', anonymous=True)
laser_sub = Subscriber('/scan', LaserScan)
image_sub = Subscriber('/image', Image)
ts = TimeSynchronizer([laser_sub, image_sub], 10)
ts.registerCallback(sync_callback)
rospy.spin()
在这个例子中, TimeSynchronizer 对象被用于同步 LaserScan 和 Image 消息。当这两种类型的传感器消息到达时,它们将按照时间戳进行匹配,并将匹配的消息组传递给回调函数 sync_callback 。
5.2.2 数据过滤与异常处理
激光雷达在实际应用中常常会遇到一些问题,如环境噪声、激光反射、遮挡等,这些问题都可能对数据质量产生影响。因此,进行数据过滤和异常处理是非常重要的,以确保数据质量满足后续处理的需求。
对于激光雷达数据,常见的过滤方法包括:
- 雷达信号强度过滤:使用激光雷达提供的强度信息来过滤噪声或非反射表面的点。
- 距离过滤:去除距离传感器过近或过远的点,因为这些点可能是由于激光雷达自身或环境造成的误差。
- 角度过滤:根据激光雷达扫描的角度范围过滤掉异常值。
以下是一个使用 rospy 进行简单数据过滤的代码示例:
def point_filter(point_cloud):
# 这里可以根据具体需求添加过滤逻辑
# 比如过滤掉距离过近或过远的点
filtered_cloud = []
for point in point_cloud:
if point.range_min < point.range < point.range_max:
filtered_cloud.append(point)
return filtered_cloud
# 假设我们订阅了 POINT_CLOUD_2 话题
def callback(msg):
# 从sensor_msgs/PointCloud2消息中解析出点云数据
points = ... # 通过msg解析出点云数据
filtered_points = point_filter(points)
# 处理过滤后的点云
在实际应用中,还需要根据应用场景做进一步的数据处理和分析。这可能包括将点云数据与里程计数据(odometry)结合起来对点云进行配准,或者根据需要调整时间戳和坐标系进行数据融合。
通过这些机制,我们可以确保激光雷达数据的质量,为机器人系统提供准确的环境信息。在下一章节,我们将进一步讨论点云处理技术,探索如何使用ROS处理和分析这些高维度的传感器数据。
6. ROS点云处理技术
在机器人和自动驾驶技术中,激光雷达因其高精度的测距能力成为不可或缺的传感器之一。激光雷达获取的数据本质上是点云数据,它由一系列在三维空间中分布的点组成,每个点包含坐标、颜色和强度等信息。ROS(Robot Operating System)提供了丰富的点云处理工具库和算法,使研究者能够有效地处理这些数据以执行特定任务。在本章节中,我们将深入探讨ROS点云处理技术,从点云数据基础到点云处理算法应用的各个层面。
6.1 点云数据基础
6.1.1 点云数据结构介绍
点云数据是由激光雷达扫描环境后获取的一系列离散点组成的集合。每个点都带有三个坐标值(x, y, z)以及可选的颜色和反射率信息。在ROS中,点云数据通常由 sensor_msgs/PointCloud2 消息类型表示。这个消息类型通过一个灵活的结构来存储点云数据,允许包含额外的通道信息,例如颜色、强度或时间戳。
为了在ROS中处理点云数据,需要了解其内部结构。 PointCloud2 消息可以包含多个通道(channels),每个通道存储了与点云相关的特定类型信息。例如,常见的通道包括:
-
x,y,z- 点的坐标。 -
rgb或rgba- 点的颜色信息。 -
intensity- 点的反射强度。 -
time- 点的采集时间戳。
6.1.2 点云数据可视化基础
点云数据在三维空间中可视化是理解和分析点云数据的重要步骤。ROS使用PCL(Point Cloud Library)库,该库提供了点云可视化的方法。 pcl visualization 模块能够将点云数据渲染为三维图形,使研究者可以在图形界面上直观地查看和分析点云数据。
在ROS中,可视化点云数据的最常见方式是使用 pcl ROS 封装的节点,如 pcl visualization 和 rviz 。 rviz 是一个可视化工具,它可以订阅 PointCloud2 消息,并将接收到的点云数据实时渲染到三维视图中。这种方式不需要编写任何代码,只需正确配置 rviz 即可实现。
接下来,我们将介绍如何使用PCL库进行点云数据的过滤与降噪处理,以及如何提取点云中的特征,并进行识别。
6.2 点云处理算法应用
6.2.1 过滤与降噪
点云数据往往包含噪声,这些噪声可能来自于传感器的测量误差或环境因素。为了提高点云数据的质量,需要进行过滤和降噪处理。
PCL库提供了一系列过滤器,可以根据不同的需求去除噪声或提取感兴趣的区域。一个常用的过滤器是 VoxelGrid 过滤器,它通过在空间中创建体素网格,将落在同一体素中的点聚合成一个点,从而实现降噪和平滑处理。
以下是一个使用 VoxelGrid 过滤器的代码示例:
#include <pcl/point_cloud.h>
#include <pcl/filters/voxel_grid.h>
// 假设cloud是已经订阅的PointCloud2消息转换得到的PointCloud XYZ格式的点云对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
// 设置体素网格过滤器的参数
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud(cloud);
sor.setLeafSize(0.01f, 0.01f, 0.01f); // 设置体素的大小为1cm x 1cm x 1cm
sor.filter(*cloud_filtered); // 应用过滤器
// 这时cloud_filtered将包含降噪后的点云数据
过滤器的参数可以根据实际的点云数据质量和需求进行调整。 setLeafSize 函数的三个参数分别代表体素网格在x、y、z方向上的长度。降低这些值会使更多的点融合到一起,从而实现更强的降噪效果,但也可能导致数据丢失。
6.2.2 特征提取与识别
点云数据的特征提取是利用点云表示物体的关键步骤。特征提取算法可以从点云数据中提取出有用的信息,如表面法线、曲率、关键点等,这些特征可以用于物体识别、分类和定位。
PCL库提供了多种特征提取算法,其中表面法线估计是一个常用的功能。通过估计每个点周围的表面法线,可以为后续的处理步骤提供重要的几何信息。下面是一个计算点云表面法线的代码示例:
#include <pcl/features/normal_3d.h>
// 假设cloud_filtered是已经过滤的PointCloud XYZ格式的点云对象
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
// 创建法线估计对象,并设置相关的参数
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimator;
normal_estimator.setInputCloud(cloud_filtered);
// 设置用于估计法线的搜索方法和半径
normal_estimator.setSearchMethod(tree);
normal_estimator.setSearchRadius(0.03);
// 计算法线
normal_estimator.compute(*cloud_normals);
// 这时cloud_normals将包含每个点对应的法线信息
在上述代码中,首先创建了一个 NormalEstimation 对象,并设置了输入点云。然后指定了搜索方法(例如Kd树)和搜索半径。搜索半径通常与预期特征的尺度有关。最后,调用 compute 函数来计算每个点的表面法线。
提取的特征可以用于进一步的点云处理任务,如使用机器学习方法进行物体识别和分类。例如,可以使用支持向量机(SVM)或深度学习模型,将提取的特征作为输入,训练出能够识别特定物体的模型。
在本章中,我们介绍了点云数据的基础知识、可视化技术以及基本的处理方法。点云处理是一个高度专业化的领域,随着技术的不断进步,其在机器人、自动驾驶和三维建模中的应用将越来越广泛。在后续章节中,我们将进一步探讨如何使用ROS提供的可视化工具,以及在机器人领域中Velodyne激光雷达的具体应用案例。
7. ROS可视化工具rviz的应用
7.1 rviz的界面与功能
7.1.1 rviz界面概览
ROS (Robot Operating System) 的一个核心组件是rviz,这是一个三维可视化工具,可以让用户直观地查看机器人的传感器数据、状态信息、地图以及规划路径。rviz的界面设计简洁直观,提供了丰富的视图选项和可配置面板,旨在方便用户进行实时数据的查看和分析。
当你启动rviz后,会看到如下的主要组成部分:
- 工具栏(Toolbar) :提供操作的快捷方式,如保存配置、添加显示类型、开始/停止渲染等。
- 显示(Displays) :列出了当前添加的所有显示类型,每种类型都可以展示不同的数据类型,如点云、图像、地图、网格等。
- 时间线(Time) :可以控制回放时间,使得用户能够查看历史数据或进行时间同步的分析。
- 视图(Views) :设置视图的视角,包括第一人称视角(FPV)、自定义视角等。
要开始使用rviz,用户需要向视图中添加显示项。这可以通过点击工具栏中的“Add”按钮来完成。之后,用户可以从列表中选择想要添加的显示类型,例如 Grid 来显示网格,或者 Point Cloud 来显示点云数据。
7.1.2 配置rviz以显示点云数据
为了在rviz中显示Velodyne激光雷达的点云数据,用户需要确保ROS的点云库(如 sensor_msgs/PointCloud2 消息)已正确集成,并且激光雷达驱动程序正在运行。下面是配置rviz显示点云数据的步骤:
- 启动rviz。
- 添加一个点云(Point Cloud2)显示项。
- 在点云显示项的属性中,指定要订阅的话题(Topic),例如
/velodyne_points。 - (可选)调整点云的大小、颜色以及样式,以获得更好的视觉效果。
以下是一个配置rviz显示点云数据的简单示例代码:
<?xml version="1.0"?>
<rviz>
<display name="My Point Cloud" type="Grid">
<param name="type" value="2d" />
<param name="pose_source" value="5" />
<param name="scale" value="1" />
<param name="color" value="0.3 0.3 0.3" />
</display>
<display name="My Point Cloud" type="Point Cloud">
<param name="topic" value="/velodyne_points" />
<param name="style" value="points" />
<param name="point_size" value="1" />
<param name="colorTransformer" value="Intensity" />
</display>
</rviz>
用户可以将上述配置保存为rviz配置文件(通常以 .rviz 为扩展名),然后在rviz中加载它以快速恢复到特定的显示设置。
7.2 高级rviz应用技巧
7.2.1 动态配置与脚本控制
除了手动配置rviz显示内容外,用户还可以使用ROS的动态重配置功能来动态地调整参数。这允许用户在运行时改变显示参数,无需重新启动rviz或任何节点。
要在rviz中启用动态重配置,您可以右键点击您希望动态调整的显示类型,然后选择”Dynamic Reconfigure”。这将打开一个包含可调整参数的界面,用户可以实时更改这些参数。
此外,用户可以编写脚本来控制rviz的配置,这对于自动化测试和演示特别有用。通过脚本,用户可以模拟用户界面操作,例如添加显示项、调整参数或改变视角。
7.2.2 自定义显示效果与交互体验
rviz提供了强大的API来允许用户自定义显示效果。通过编写插件或使用现有的插件系统,开发者可以创建专门的显示类型以满足特殊需求。例如,用户可以创建一个显示类型来高亮显示特定的对象或障碍物。
同时,rviz支持交互式的视图控制,如鼠标滚轮缩放、中键旋转等。用户可以通过自定义键绑定来自定义这些交互行为,甚至可以编程实现更复杂的交互,如通过特定的输入来触发点云的局部放大等。
通过结合这些高级功能,开发者和用户可以创建更加直观和高效的可视化环境,进一步推动机器人应用的开发和优化。
简介:ROS是一个为机器人软件开发提供的开源框架,而Velodyne激光雷达是提供精确3D点云数据的高级传感器。本文将指导如何在ROS环境下配置Velodyne激光雷达驱动,并提供安装、参数配置、数据发布、点云处理、可视化以及应用示例等实战内容。掌握这些技能对机器人领域的研究和开发至关重要,可以有效利用Velodyne激光雷达进行导航、地图创建、障碍物检测、避障和定位等任务。

















 388
388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









