







一,纯跟踪算法数学原理:
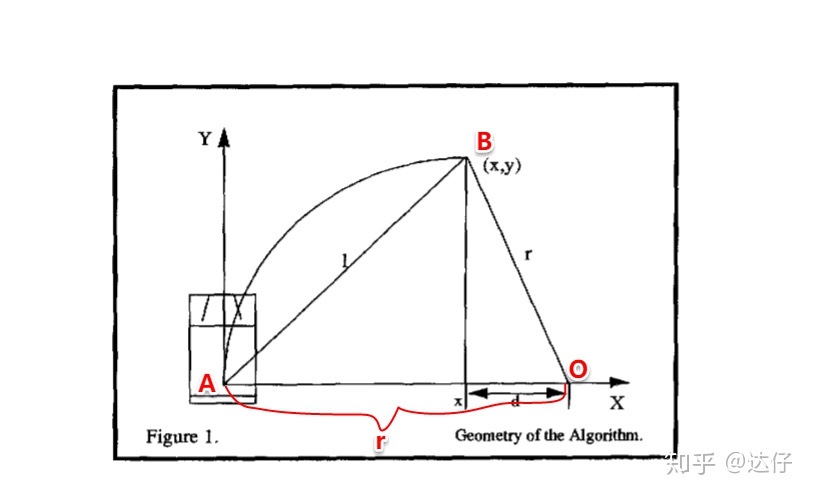
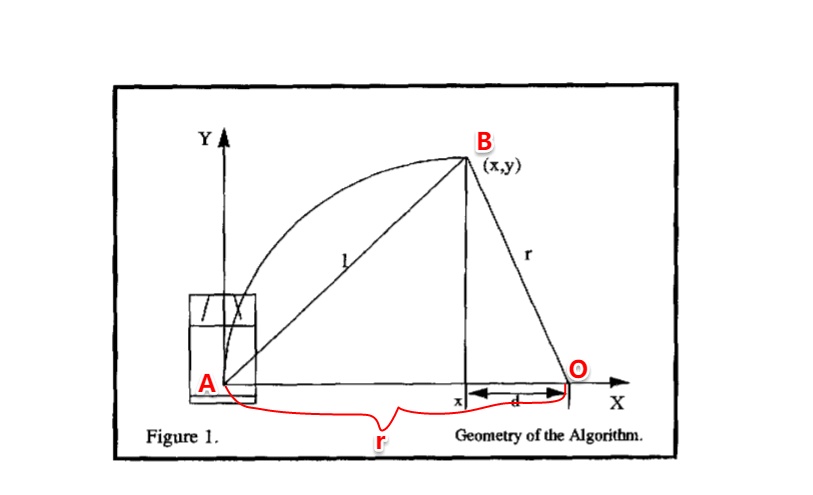
如上图所示,A点是车辆后轴中心(也是图中坐标系的原点,图中这种坐标系我们一般称之为:车辆坐标系),B点是车辆要达到的目标点(预瞄点),L是AB之间的距离(预瞄距离),O点是假设存在的圆心使得车辆从位置A以转弯半径r可以达到位置B。圆心位置O的坐标与转弯半径r就是计算目标。此图颇有遗憾,因为AO线段看上去比BO线段长,但二者应该是相等的,都是转弯半径。
理一下已知信息有哪些:
B点坐标,A点坐标,AB之间的距离L
计算目标:转弯半径r
根据图中几何关系:r = x +d
L^2 = x^2 + y^2
一步步推导:
d = r -x
(r-x)^2+y^2=r^2
r^2-2rx+x^2+y^
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3382
3382











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









