







1.PTAM(parallel Tracking and Mapping)特征点法 ( https://github.com/Ewenwan/PTAM4AR) (https://blog.csdn.net/xiaoxiaowenqiang/article/details/80956013)
2.PTAM意义:
-
PTAM实现了跟踪和建图的并行化
-
PTAM是第一个使用 非线性优化,而不是传统的 滤波器 作为后端的方案。 它因为了关键帧机制:我们不以精细的出路没衣服图像,而是把几个关键图像穿起来,然后以后花其轨迹和地图。
-
根据PTAM估计的相机位姿,我们可以在一个虚拟的平面行放置虚拟物体,看起来和真是场景一样
3.PTAM是增强现实的一个库,与SLAM框架类似,兼容ROS
4.ORB_SLAM就是集成并改进PTAM的
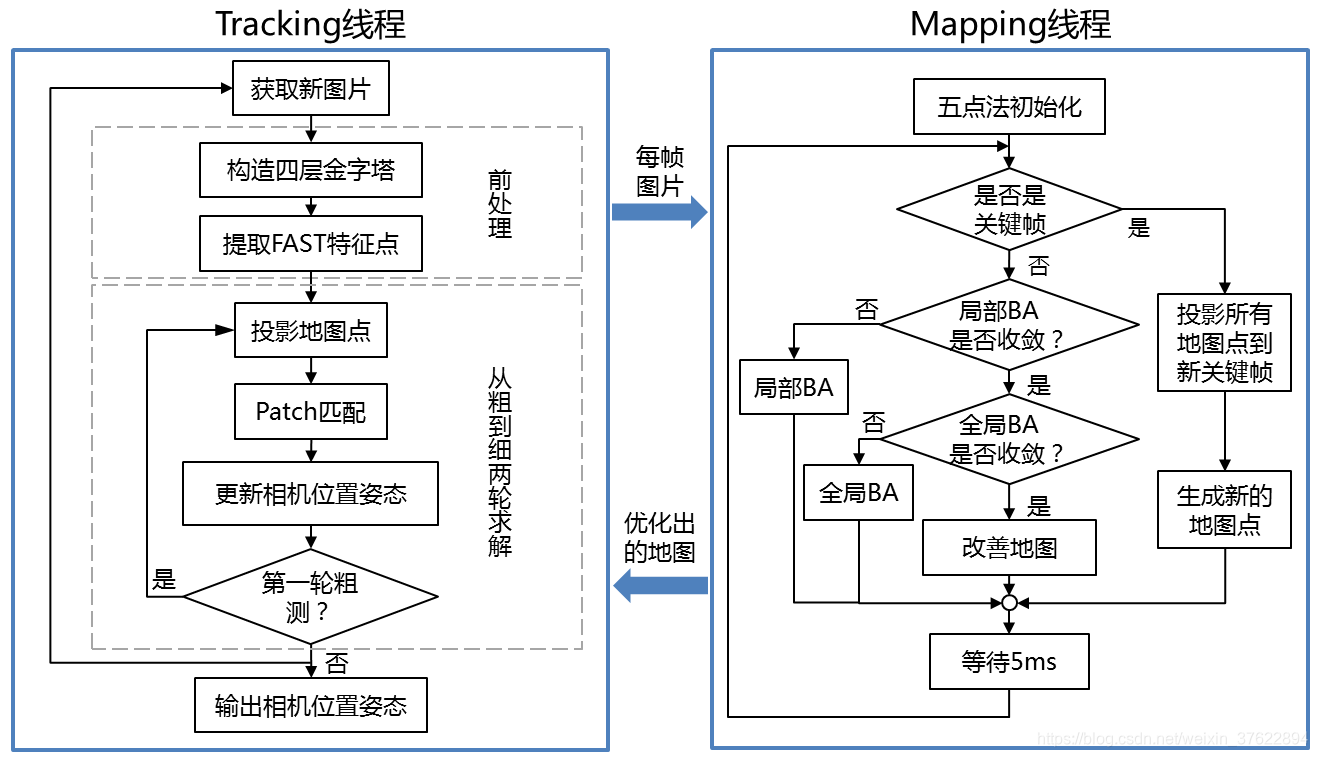
5.PTAM是最早将Tracking(姿态跟踪) 和 mapping(建立地图) 分开作为两个线程的一种SLAM算法,是一种用基于关键帧的单目视觉SLAM算法。
6.PPTAM主要分为这几个部分:
-
1) Track线程
1.金字塔分层,FAST特征提取
(对图片构造金字塔的目的主要有两个:1)加快匹配; 2)提高地图点相对于相机远近变化时 鲁棒性)
(FAST是常用的特征点,有点是快,缺点是鲁棒性差。通常提取大量的匹配点,后使用SSD快匹配,剔除误 匹配)
2.地图初始化
3.跟踪定位
(极限几何与极限搜索,RANSAC(随机采样一直)及N点算法(主要围绕五点算法))
4.选取关键帧到缓存队列
5.重定位(美珍高斯模糊小图SSD相似度匹配)
-
map线程
5.5 先五点法加RANSAC求出初值
6. 局部BundleAdjustment (BA)
7. 全局BundleAdjustment
8. 从缓存队列提取出关键正到地图
9. 极限搜索加点到地图

















 2773
2773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









