







前言
这篇文章的内容主要对一个超声波+舵机小项目进行总结,记录学习到的知识以及遇到的问题,方便后续对知识的回溯与更新,如果能帮大家少走弯路也是极好的。如果有错误还请指正,谢谢~~
一、项目涉及的内容
本项实验的硬件组成有STM32F103C8T6开发板、USB转TTL串口模块(CH340)、超声波模块(HC-SR04)、舵机模块(SG90 180度),设计到的软件模块有GPIO和AFIO、通用定时器TIM2、中断、系统定时器SysTick,接下来对这些主要模块进行讲解,回顾项目的重点,希望大家也能有所收获。
项目简介
通过超声波模块进行测距,根据距离来操纵舵机运动实时反馈。
二、模块实操
1. SysTick系统定时器模块
我们使用 STM32 的内部 SysTick 来实现延时的,要进行延时的时候开启SysTick,延时时间到就直接把SysTick失能,这样就不需要一直占用CPU的执行。
代码如下:
void ms_delay(uint32_t ms)
{
uint32_t i;
SysTick_Config(72000); //一个循环相当于1毫秒
for(i=0;i<ms;i++)
{
while( !((SysTick->CTRL)&(1<<16)) );//判断是否一次计数结束
}
SysTick->CTRL &= ~(SysTick_CTRL_ENABLE_Msk); //循环结束后让系统定时器失能
}
我们先看一下两段对寄存器直接操作的代码,这段有点复杂难懂,但其实就是他们的作用也比较简单:
- while( !((SysTick->CTRL)&(1<<16)) );用来判断CTRL这个SysTick 控制及状态寄存器的第16位是否为1,不为1就在while循环体内持续等待直到一次计数周期结束。
- SysTick->CTRL &= ~(SysTick_CTRL_ENABLE_Msk);操作CTRL寄存器的第0位为0来关闭系统定时器,SysTick_CTRL_ENABLE_Msk是系统的宏定义,其实就是1<<0。

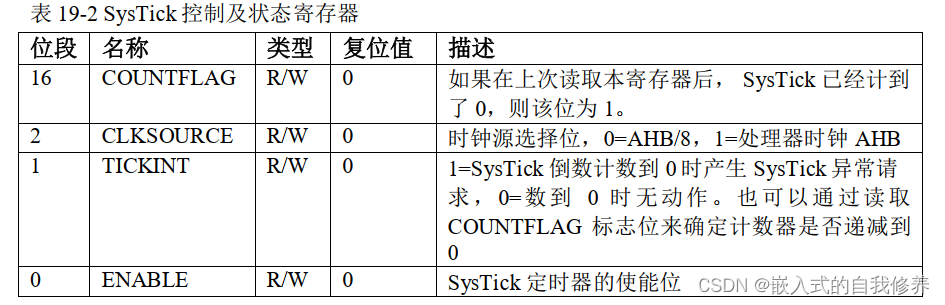
【野火®】零死角玩转STM32—F103霸道.pdf-->19.2 SysTick 寄存器介绍-->表 19-2 SysTick 控制及状态寄存器
定时时间计算:
计数器每计数一次的时间为 1/SYSCLK,一般我们设置系统时钟 SYSCLK 等于 72M。当重装载数值寄存器的值递减到 0 的时候,系统定时器就产生一次中断,只要不把它在 SysTick 控制及状态寄存器中的使能位清除,就以此循环往复。
因此只要知道计数的次数就可以准确得到它的延时时间,STM32 的内核库已经提供了这个功能,只要配置内置的SysTick_Config()即可实现,SysTick_Config()函数的形参用来设置重装载寄存器的值。
SysTick_Config(72000)代表:72000*(1/72MHz) = 1/1000 = 1(ms)。即定时为1ms。
同理,我们可以得出周期为1微秒的系统定时器的写法,72*(1/72MHz) = 1/1000000 = 0.001(ms) = 1(us)。
void us_delay(uint32_t us)
{
uint32_t i;
SysTick_Config(72); //一个循环相当于1微秒
for(i=0;i<us;i++)
{
while( !((SysTick->CTRL)&(1<<16)) );
}
SysTick->CTRL &= ~(SysTick_CTRL_ENABLE_Msk); //循环结束后让系统定时器失能
}2. SG90 舵机模块
舵机是由PWM波来控制的一个器件,不同的PWM波的高电平时间对应的是舵机不同的位置,也就是说,你输出一个一定占空比的PWM波,对应的就是舵机确定好的一个位置。 </
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2165
2165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









