






前段时间一个项目需要机器人将自己的坐标定时发送给上位机,我师父随手写了一个中断样例,在这里分享一下:
首先介绍两个RAPID指令:
1、IDelete:删除中断,用于取消或者删除中断预定。
2、CONNECT、、、WITH、、、。用于将中断识别号与软中断程序相连。这样只要发现中断识别号,就会自动执行软中断程序。
样例如下:
第一、变量的申明:
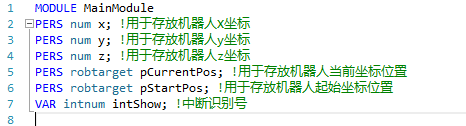
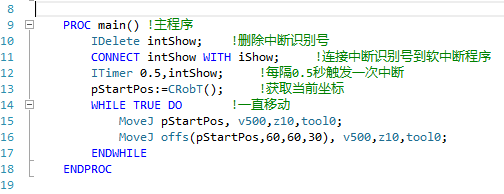
第二、主程序:
第三、软中断程序:

运行结果就会显示在示教器上了。
前段时间一个项目需要机器人将自己的坐标定时发送给上位机,我师父随手写了一个中断样例,在这里分享一下:
首先介绍两个RAPID指令:
1、IDelete:删除中断,用于取消或者删除中断预定。
2、CONNECT、、、WITH、、、。用于将中断识别号与软中断程序相连。这样只要发现中断识别号,就会自动执行软中断程序。
样例如下:
第一、变量的申明:
第二、主程序:
第三、软中断程序:
运行结果就会显示在示教器上了。
 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























