







1.模型细化
vtk中实现网格细化的累有vtkLinearSubdivisionFilter、vtkLoopsubdivisionFilter、vtkButterflySubdivisionFilter。这三个类都继承自vtkInterpolatingSubdivisionFilter。具体的类的继承关系图如下图所示:
vtkInterpolatingSunvisionFilter内部提供了SetNumberOfSubvisions()函数来设置细化的次数,其中每次细化后模型的三角面片的个数将是细化前的四倍。因此,在对网格模型进行n次细化后,该模型的面片个数将是原始模型面片数目的4*n倍。
1.1 vtkLinearSubdivisionFilter
该类实现了一种线性细分算法,每次细分将每个三角形面片生成四个新的面片,该算法比较简单,速度快,但是细分后不能产生光滑的模型。
1.2 vtkLoopSubdivisionFilter
该类实现的是Loop细分算法,每次细分会将一个三角面片生成4个三角面片,具体算法思想可以参考文献[1];该方法可以生成光滑的连续曲面,应用比较广泛。
1.3 vtkButterflySubdivisionFilter
该类实现了蝶形细分算法,具体的算法思想可以参考文献[2].

2.网格模型细化实验
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkRenderingFreeType);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <vtkSmartPointer.h>
#include <vtkPolyDataReader.h>
#include <vtkPolyData.h>
#include <vtkLinearSubdivisionFilter.h>
#include <vtkLoopSubdivisionFilter.h>
#include <vtkButterflySubdivisionFilter.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkCamera.h>
#include <vtkRenderWindowInteractor.h>
int main()
{
//读数据
vtkSmartPointer<vtkPolyDataReader> reader =
vtkSmartPointer<vtkPolyDataReader>::New();
reader->SetFileName("fran_cut.vtk");
reader->Update();
vtkSmartPointer<vtkPolyData> orig = reader->GetOutput();
std::cout << "original" << "-----------------------" << std::endl;
std::cout << "模型点数为: " << orig->GetNumberOfPoints() << std::endl;
std::cout << "模型面数为: " << orig->GetNumberOfPolys() << std::endl;
//线性网格细分滤波器
vtkSmartPointer<vtkLinearSubdivisionFilter> linear =
vtkSmartPointer<vtkLinearSubdivisionFilter>::New();
linear->SetInputData(orig);
linear->SetNumberOfSubdivisions(4);
linear->Update();
vtkSmartPointer<vtkPolyData> linearInfo = linear->GetOutput();
std::cout << "linear" << "-----------------------" << std::endl;
std::cout << "模型点数为: " << linearInfo->GetNumberOfPoints() << std::endl;
std::cout << "模型面数为: " << linearInfo->GetNumberOfPolys() << std::endl;
//Loop网格细分滤波器
vtkSmartPointer<vtkLoopSubdivisionFilter> loop =
vtkSmartPointer<vtkLoopSubdivisionFilter>::New();
loop->SetInputData(orig);
loop->SetNumberOfSubdivisions(4);
loop->Update();
vtkSmartPointer<vtkPolyData> loopInfo = loop->GetOutput();
std::cout << "loop" << "-----------------------" << std::endl;
std::cout << "模型点数为: " << loopInfo->GetNumberOfPoints() << std::endl;
std::cout << "模型面数为: " << loopInfo->GetNumberOfPolys() << std::endl;
//butterfly网格细分滤波器
vtkSmartPointer<vtkButterflySubdivisionFilter> butterfly =
vtkSmartPointer<vtkButterflySubdivisionFilter>::New();
butterfly->SetInputData(orig);
butterfly->SetNumberOfSubdivisions(4);
butterfly->Update();
vtkSmartPointer<vtkPolyData> butterflyInfo = butterfly->GetOutput();
std::cout << "butterfly" << "-----------------------" << std::endl;
std::cout << "模型点数为: " << butterflyInfo->GetNumberOfPoints() << std::endl;
std::cout << "模型面数为: " << butterflyInfo->GetNumberOfPolys() << std::endl;
vtkSmartPointer<vtkPolyDataMapper> origMapper =
vtkSmartPointer<vtkPolyDataMapper>::New();
origMapper->SetInputData(orig);
vtkSmartPointer<vtkActor> origActor =
vtkSmartPointer<vtkActor>::New();
origActor->SetMapper(origMapper);
vtkSmartPointer<vtkPolyDataMapper> linearMapper =
vtkSmartPointer<vtkPolyDataMapper>::New();
linearMapper->SetInputData(linear->GetOutput());
vtkSmartPointer<vtkActor> linearActor =
vtkSmartPointer<vtkActor>::New();
linearActor->SetMapper(linearMapper);
vtkSmartPointer<vtkPolyDataMapper> loopMapper =
vtkSmartPointer<vtkPolyDataMapper>::New();
loopMapper->SetInputData(loop->GetOutput());
vtkSmartPointer<vtkActor> loopActor =
vtkSmartPointer<vtkActor>::New();
loopActor->SetMapper(loopMapper);
vtkSmartPointer<vtkPolyDataMapper> butterflyMapper =
vtkSmartPointer<vtkPolyDataMapper>::New();
butterflyMapper->SetInputData(butterfly->GetOutput());
vtkSmartPointer<vtkActor> butterflyActor =
vtkSmartPointer<vtkActor>::New();
butterflyActor->SetMapper(butterflyMapper);
//
double ltView[4] = { 0, 0, 0.5, 0.5 };
double rtView[4] = { 0.5, 0, 1, 0.5 };
double lbView[4] = { 0, 0.5, 0.5, 1 };
double rbView[4] = { 0.5, 0.5, 1, 1 };
vtkSmartPointer<vtkRenderer> origRender =
vtkSmartPointer<vtkRenderer>::New();
origRender->SetViewport(ltView);
origRender->AddActor(origActor);
origRender->SetBackground(1, 0, 0);
vtkSmartPointer<vtkRenderer> linearRender =
vtkSmartPointer<vtkRenderer>::New();
linearRender->SetViewport(rtView);
linearRender->AddActor(linearActor);
linearRender->SetBackground(0, 1, 0);
vtkSmartPointer<vtkRenderer> loopRender =
vtkSmartPointer<vtkRenderer>::New();
loopRender->SetViewport(lbView);
loopRender->AddActor(loopActor);
loopRender->SetBackground(0, 0, 1);
vtkSmartPointer<vtkRenderer> butterflyRender =
vtkSmartPointer<vtkRenderer>::New();
butterflyRender->SetViewport(rbView);
butterflyRender->AddActor(butterflyActor);
butterflyRender->SetBackground(0, 0, 0);
//
vtkSmartPointer<vtkRenderWindow> rw =
vtkSmartPointer<vtkRenderWindow>::New();
rw->AddRenderer(origRender);
rw->AddRenderer(linearRender);
rw->AddRenderer(loopRender);
rw->AddRenderer(butterflyRender);
rw->SetSize(640, 640);
rw->SetWindowName("PolyData Subdivision");
origRender->GetActiveCamera()->SetPosition(0, -1, 0);
origRender->GetActiveCamera()->SetFocalPoint(0, 0, 0);
origRender->GetActiveCamera()->SetViewUp(0, 0, 1);
origRender->GetActiveCamera()->Azimuth(30);
origRender->GetActiveCamera()->Elevation(30);
origRender->ResetCamera();//刷新照相机
linearRender->SetActiveCamera(origRender->GetActiveCamera());
loopRender->SetActiveCamera(origRender->GetActiveCamera());
butterflyRender->SetActiveCamera(origRender->GetActiveCamera());
vtkSmartPointer<vtkRenderWindowInteractor> rwi =
vtkSmartPointer<vtkRenderWindowInteractor>::New();
rwi->SetRenderWindow(rw);
rwi->Start();
rw->Render();
return 0;
}输出结果:
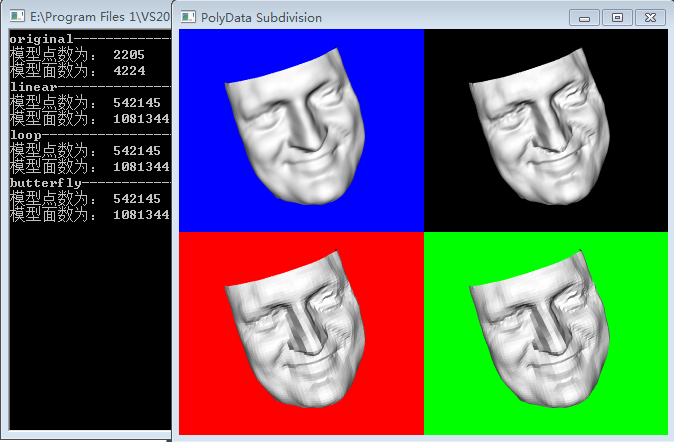
红色视窗为原始三角网格模型,绿色视窗采用了线性细分算法;蓝色视窗采用Loop细分算法;黑色视窗采用了Butterfly细分算法。
鼻子部位的细节图:
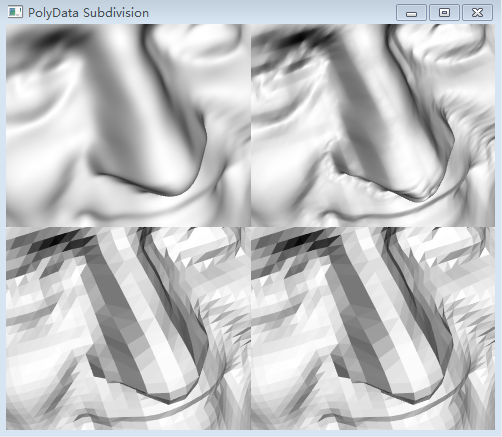
从上面结果上看,我们可以看出:线性细分效果似乎没有起到多大作用??!Loop细分结果得到了很光滑的曲面,Butterfly细分在细节部分处理的并不很理想。
注意事项:
所有模型细化算子仅对三角网格数据有效,因此在处理多边形数据时,需要通过VTKTriangleFilter将多边形网格转换为三角网格才能处理。















 4637
4637











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









