







近年来,由于无人机、无人车等技术的不断成熟,需要用到实时测距的场所也越来越多,如定位,避障,测速等,相比于其他测距方法,单目测距是利用一个摄像头进行视频拍摄,在图像中找到待测物体。这一系列动作,涉及到了物体的识别,相机的结构,坐标变换的一些知识,距离的获取是一个很广泛的课题,用摄像头来测距是其中一个方向,包括单目测距、双目测距、结构光测距等方法。
在这里,我们主要用一个摄像头通过建立一定的模型来解决测距的问题。
1. 安装包
python 3.7 或以上
pip install cvzone
pip install mediapipe
2.成像原理
单目摄像头的模型可以近似考虑为针孔模型,如图所示
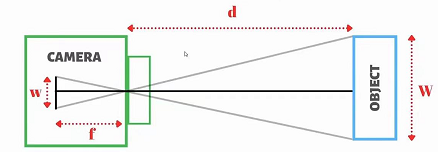
- f: 焦距
- W: 目标物体的实际宽度
- w: 成像后的宽度
- d: 物体与相机之间的实际距离或深度
f 、d、w、W的之间的关系如下:
d
f
=
W
w
\frac{d}{f}=\frac{W}{w}
fd=wW
2.1 相机校准
我们的目标是计算出目标物体的距离d,但前提需要知道焦距f,焦距f的计算公式如下:
f
=
w
∗
d
W
f=\frac{w*d}{W}
f=Ww∗d
我们可以将一个物体放在离摄像头已知的距离d,同时我们知道实际物体的宽度W,以及呈像后的宽度w,从而上述公式计算出焦距f。
2.2 计算物体的距离d
相机校准后,焦距f的值即为已知,根据如下公式,可计算出目标物体的距离:
d
=
f
∗
W
w
d=\frac{f*W}{w}
d=wf∗W
如果我们知道已知物体的W,和成像后的w,就可以实时计算出目标物体的距离d。
3 案例介绍

本文以人脸两只眼睛的距离作为目标物体的W, 由于男性两只眼睛距离为64mm,女性两只眼睛距离为62mm ,我们这里取平均值63作为人脸眼睛的距离。因此计算人脸的距离,只需知道成像后的w,即可计算出人脸离摄像头的距离d.
3.1 检测人脸
import cv2
import cvzone
import cvzone.FaceMeshModule import FaceMeshDetector
# 检测人脸
detector=FaceMeshDetector(maxFaces=1)
cap=cv2.VideoCapture(0)
while True:
success,img =cap.read()
img,faces=detector.findFaceMesh(img)
cv2.imshow("Image",img)
cv2.waitKey(1)

3.2 计算视频中双眼的距离
import cv2
import cvzone
import cvzone.FaceMeshModule import FaceMeshDetector
# 检测人脸
detector=FaceMeshDetector(maxFaces=1)
cap=cv2.VideoCapture(0)
while True:
success,img =cap.read()
img,faces=detector.findFaceMesh(img)
if faces:
face =faces[0]
pointLeft=face[145] #左眼中心点坐标
pointRight=face[375] #右眼中心点坐标
# 绘制人眼中心点并连线
cv2.line(img,pointLeft,pointRight,(0,200,0),3)
cv2.circle(img,pointLeft,5,(255,0,255),cv2.FILLED)
cv2.circle(img,pointRight,5,(255,0,255),cv2.FILLED)
w,_=detector.findDistance(pointLeft,pointRight)
print(w)
cv2.imshow("Image",img)
cv2.waitKey(1)
3.3 相机标定:计算焦距f
```python
import cv2
import cvzone
import cvzone.FaceMeshModule import FaceMeshDetector
# 检测人脸
detector=FaceMeshDetector(maxFaces=1)
cap=cv2.VideoCapture(0)
while True:
success,img =cap.read()
img,faces=detector.findFaceMesh(img)
if faces:
face =faces[0]
pointLeft=face[145] #左眼中心点坐标
pointRight=face[375] #右眼中心点坐标
# 绘制人眼中心点并连线
cv2.line(img,pointLeft,pointRight,(0,200,0),3)
cv2.circle(img,pointLeft,5,(255,0,255),cv2.FILLED)
cv2.circle(img,pointRight,5,(255,0,255),cv2.FILLED)
w,_=detector.findDistance(pointLeft,pointRight) #保持人脸到摄像头50cm下测量
# Finding the Focal Length
W=6.3 # 真实人脸间距 6.3cm
d= 50 # 保持人脸到摄像头50cm的距离
f=(w*d)/W
print(f)
cv2.imshow("Image",img)
cv2.waitKey(1)
3.4 计算人脸到相机的距离
根据上一步,相机标定的结果。假设计算出相机的焦距f
f =840 mm
根据公式:
d
=
f
∗
W
w
d=\frac{f*W}{w}
d=wf∗W
即可计算出实时的人脸到摄像头的距离
import cv2
import cvzone
import cvzone.FaceMeshModule import FaceMeshDetector
# 检测人脸
detector=FaceMeshDetector(maxFaces=1)
cap=cv2.VideoCapture(0)
while True:
success,img =cap.read()
img,faces=detector.findFaceMesh(img)
if faces:
face =faces[0]
pointLeft=face[145] #左眼中心点坐标
pointRight=face[375] #右眼中心点坐标
# 绘制人眼中心点并连线
cv2.line(img,pointLeft,pointRight,(0,200,0),3)
cv2.circle(img,pointLeft,5,(255,0,255),cv2.FILLED)
cv2.circle(img,pointRight,5,(255,0,255),cv2.FILLED)
w,_=detector.findDistance(pointLeft,pointRight) #保持人脸到摄像头50cm下测量
W=6.3 # 真实人脸间距 6.3cm
# Finding the Focal Length
# d= 50 # 保持人脸到摄像头50cm的距离
# f=(w*d)/W
# print(f)
# Finding distance
f = 840 # 根据相机标定的结果
d = (W * f)/w
print(d)
cvzone.putTextRect(img,f'Depth:{int(d)}cm',(face[10][0]-100,face[10][1]-50),scale=2)
cv2.imshow("Image",img)
cv2.waitKey(1)
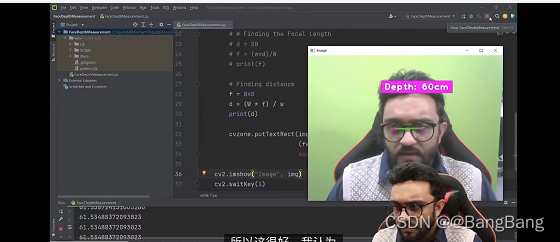
可以看到:人脸靠近相机d越来越小,远离相机d越来越小。从而可以大致判断出人脸离相机的距离。虽然达不到深度相机那么精确,但在某些场景中,该计算出的距离应用起来可以有不错的效果


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











