







一、概述
1、LIN网络
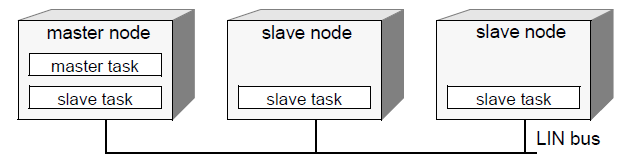
如下图为一个LIN网络,包含了一个Master节点,两个Slave节点:
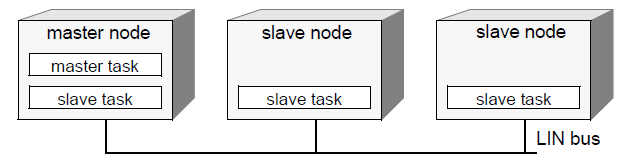
LIN网络
在LIN总线通讯中,Master task决定了在LIN总线上传送的是哪一帧,Slave task提供每一帧所携带的数据。
2、LIN节点的层次结构图:
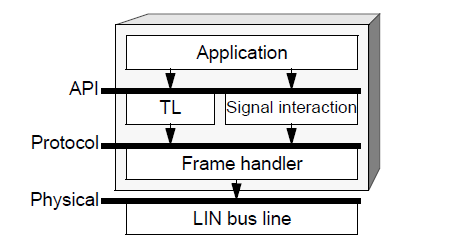
LIN1.3与LIN2.1的区别在于,LIN1.3没有TL层,Signal interaction放在Protocol层中,没有单独的TP层。
3、LIN总线特点:
串行通信:线间干扰小,节省线束,传输距离长;
单线传输:增强的ISO9141 (ISO 15765-1) , 总线电压基于VBAT;
最高速率20Kbit/s:满足车身上大部分的应用需求;
单主多从结构:无需仲裁;
基于通用UART/SCI的低成本接口硬件:几乎所有MCU有具备LIN总线的硬件基础;
从节点无须晶振或陶瓷震荡器就可以实现同步:大幅度降低成本;
一条总线最多可连接16个节点:由总线电气特性决定;
支持诊断功能:支持UDS服务;
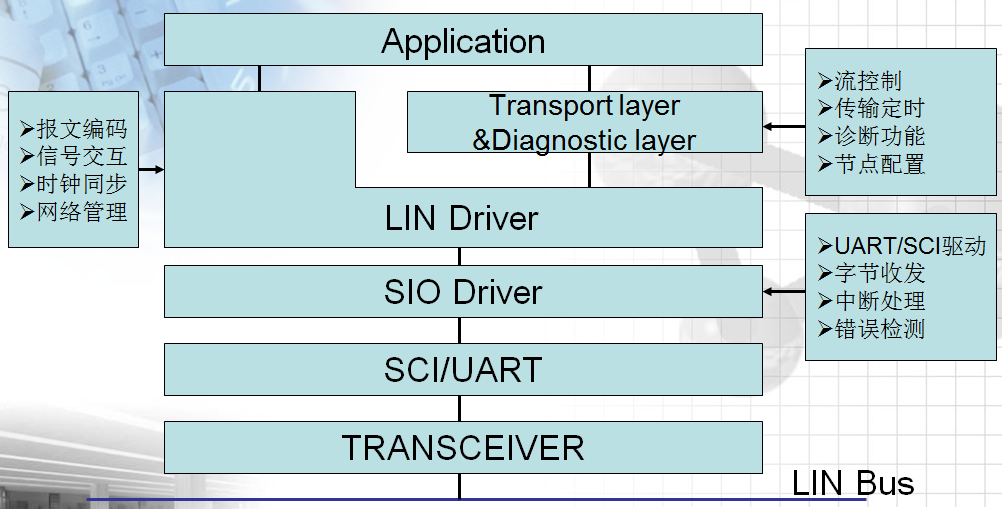
4、LIN2.1节点模型:
LIN1.3节点模型:
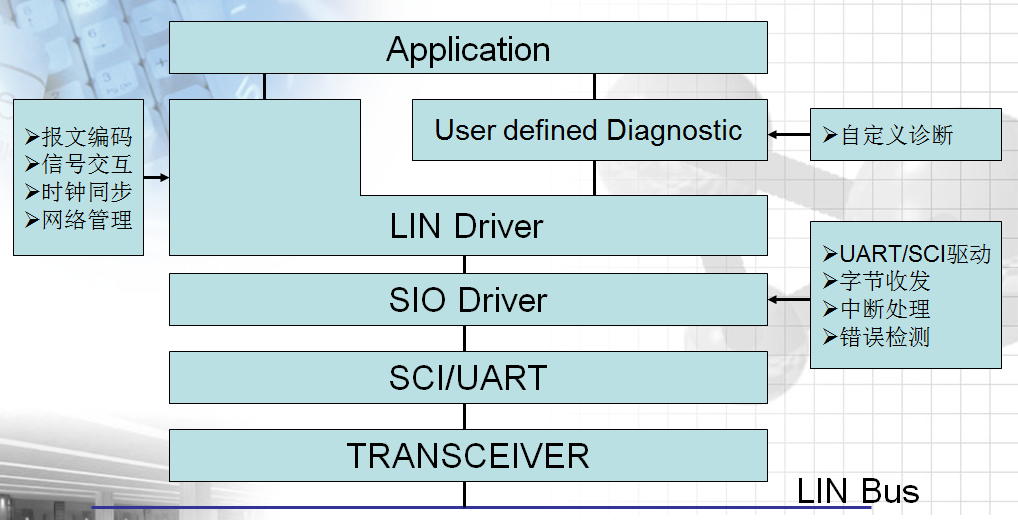
LIN2.1与LIN1.3节点模型的差别在于LIN1.3没有Transport layer,所以也就没有流控、传输时间控制的功能,LIN1.3协议中没有对诊断及节点配置进行规范,所以在LIN1.3中完成相应的功能都放在自定义诊断中完成。
5、LIN网络拓扑结构:
1)单主任务,多从任务;
2)主节点包含主任务和从任务;
3)从节点只包含从任务;
4)主任务决定总线上的报文,从 任务发送数据;
6、LIN帧:
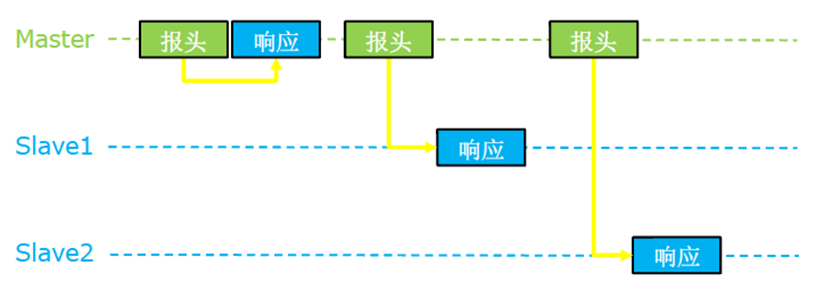
通信原理:主任务发送报头,从任务用响应来补充报头形成完整的报文。
报文传输:报文的内容由ID来定义。
广播:所有节点都能够接受总线上的帧。
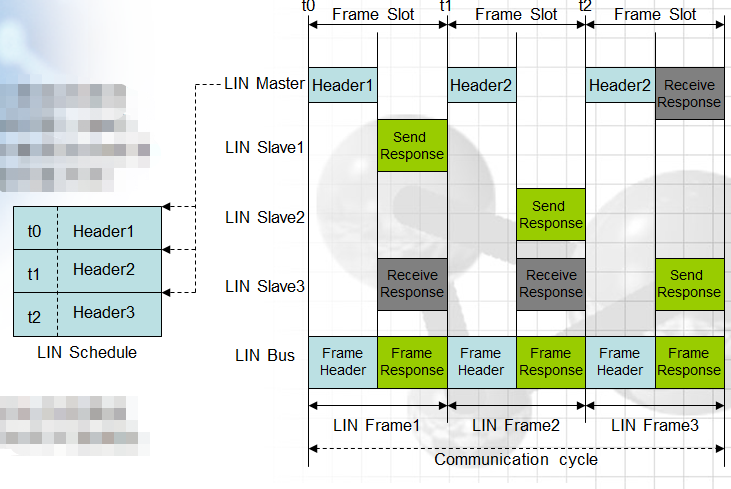
7、调度表
1)负责调度网络各报文发送的顺序;
2)为每帧报文分配发送时隙(slot);
3)发送时隙:报文可以被发送的时间;
4)不同报文的发送时隙可能不同;
5)调度表在网络系统设计阶段确定;
6)调度表使得LIN通信具有可预测性;

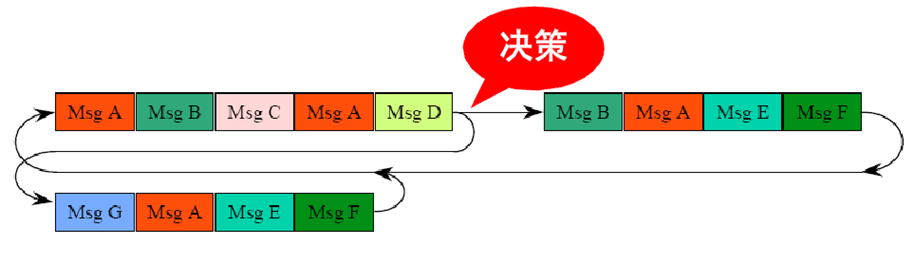
8、切换调度表:
主任务可以拥有多个调度表,并在不同的调度表之间切换,该处理方式增加通信的灵活性。
二、协议规范
(1)字节间隔位于每个字节之间;
(2)响应间隔位于报头与响应之间;
(3)留给MCU足够的处理时间;
(4)帧长度可能增长;
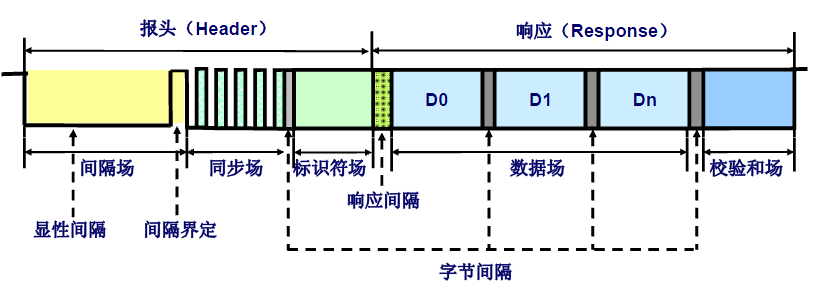
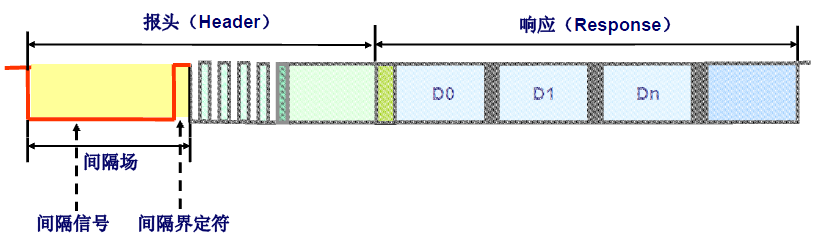
1、间隔场
1)表示一帧报文的起始,由主节点发出;
2)间隔信号至少由13个显性位组成;
3)隔界定符至少由1个隐形位组成;
4)间隔场是唯一一个不符合字节场格式的场;
5)从节点需要检测到至少连续11个显性位才认为是间隔信号;
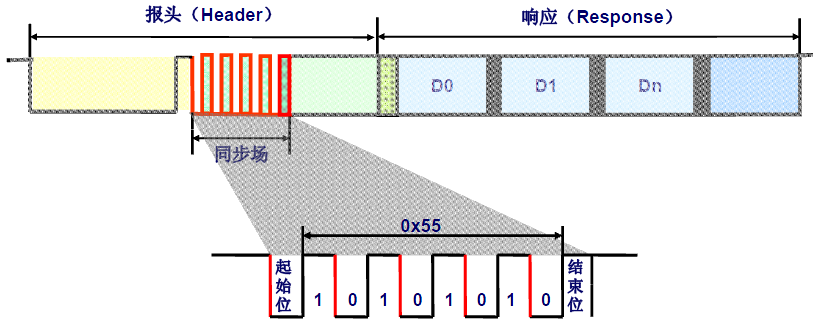
2、同步场
1)确保所有从节点使用与节点相同的波特率发送和接收数据;
2)一个字节,结构固定:0X55;
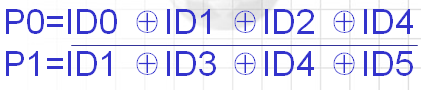
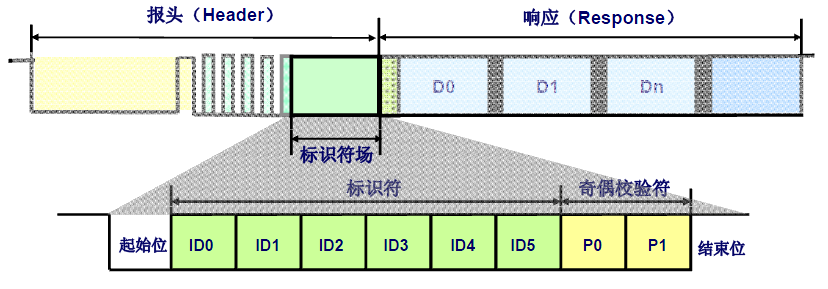
3、标识符场 (PID)
1)ID的范围从0到63(Ox3f);
2)奇偶校验符(Parity)P0,P1;
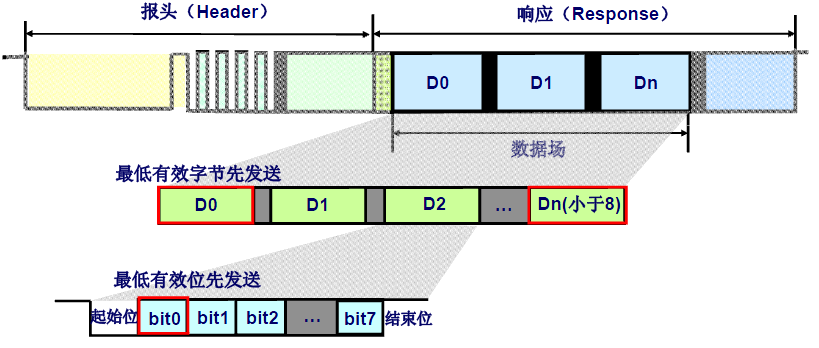
4、数据场
1)数据场长度1到8个字节;
2)低字节先发,低位先发;
3)如果某信号长度超过1个字节采用低位在前的方式发送(小端);
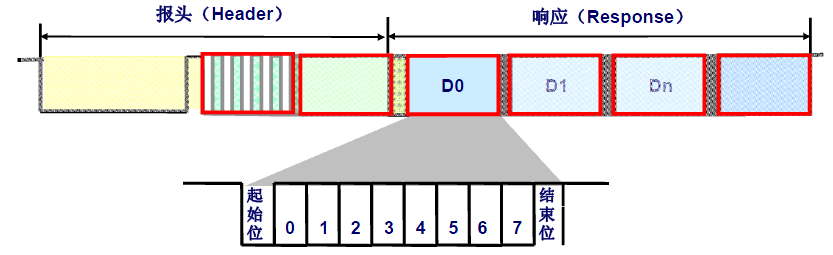
5、字节场
1)基于SCI的通信格式;
2)发送一个字节需要10个位时间(TBIT);
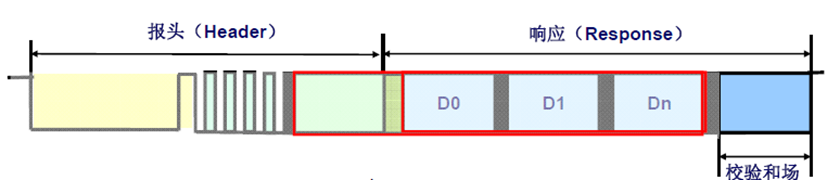
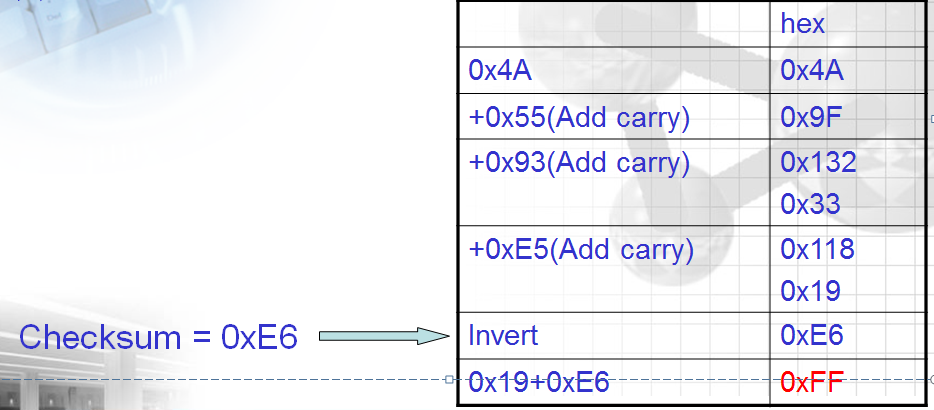
6、校验和场
用于校验接收的数据是否正确
1)经典校验(Classic Checksum)仅校验数据场(LIN1.3)
2)增强校验(Enhance Checksum)校验标识符场与数据场内容(LIN2.0、LIN2.1)
标识符为0x3C和0x3D的帧只能使用经典校验
计算方法:反转8位求和(inverted eight bit sum)
例:Data=0x4A、0x55、0x93、0xe5
7、帧长度 * 时间
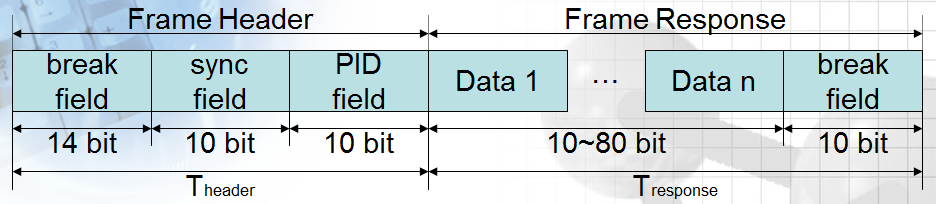
最小帧长度时间
T_Header_NOMINAL=34*Tbit
T_Response_NOMINAL=10*(Len_DATA+1)*Tbit
T_Frame_NOMINAL=T_Header_NOMINAL+T_Response_NOMINAL
最大帧长度时间
T_Header_MAX = 1.4 * T_Header_NOMINAL
T_Response_MAX = 1.4 * T_Response_NOMINAL
T_Frame MAX = T_Header_MAX + T_Response_MAX
8、帧类型(根据PID区分)
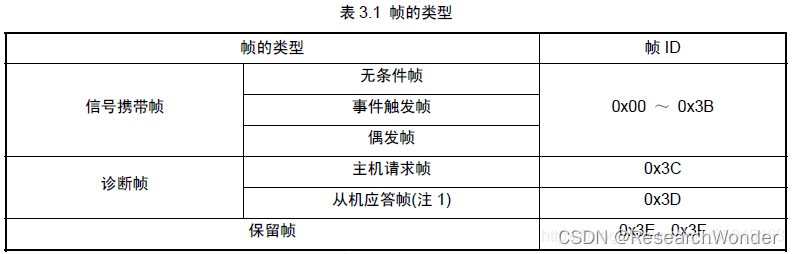
1)无条件帧(ID: 0x00 ~ 0x3B)--常用
使用频度最高的帧类型,无任何发送条件;
标识符(ID)为0到59(0x3B);
主任务发出报头,一个任务响应,一个或多个任务接收如下图:
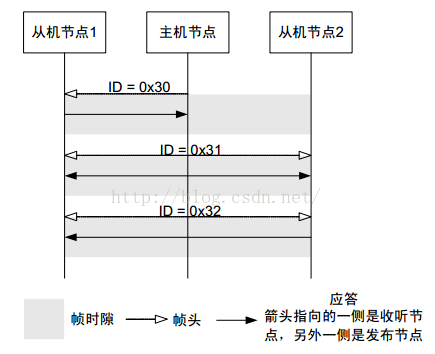
帧 ID = 0x30 应答部分的发布节点为从机节点1,收听节点为主机节点。
典型应用:从机节点1 向 主机节点报告自身某信号的状态。
帧 ID = 0x31 应答部分的发布节点为主机节点,收听节点为从机节点1和从机节点2。
典型应用: 主机节点 向 从机节点发布信息。
帧 ID = 0x32 应答部分的发布节点为从机节点2,收听节点为从机节点1。
典型应用: 从机节点之间彼此通信。
2)事件触发帧
引入事件触发帧的目的是节省带宽。
BCM(Master)需要获取4个车门的状态,该如何实现?
第一种方式:
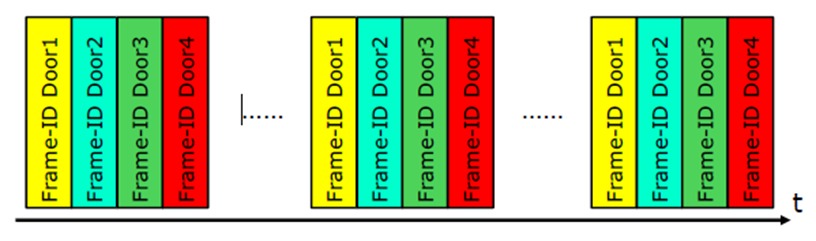
每次向四个车门请求状态,浪费带宽,因为车门状态不是经常发生。
第二种方法:
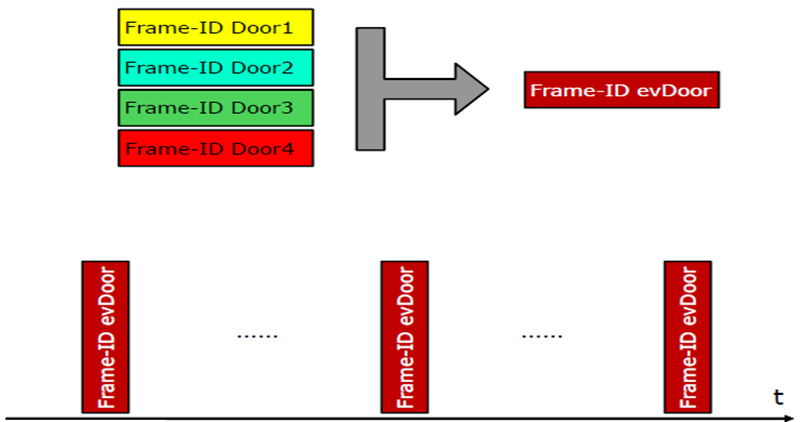
将请求四个车门状态的帧合并为一个事件触发帧,Master不需要每次发送四个帧请求车门的状态,只需要发送一个事件触发帧即可,哪个车门状态发生变化,对应的车门将响应该事件触发帧。
事件触发帧的响应会出现如下三种情况:
第一种:没有车门状态变化。

第二种:一个车门状态发生变化:

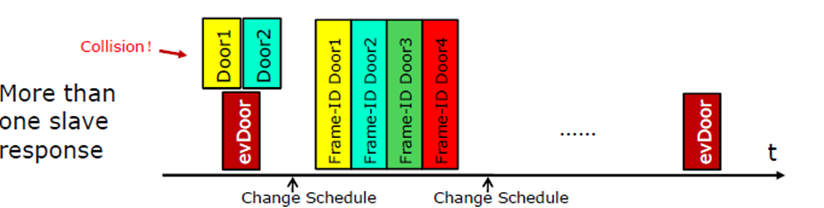
第三种:多个车门状态发生变化,此时将出现冲突,冲突处理时,Master需要像第一种处理方式一样,重新发送四帧分别请求单个车门状态。LIN1.3与LIN2.0、LIN2.1处理方式有所区别,区别在于LIN1.3不切换调度表,占用事件触发帧的时隙发送,LIN2.0、LIN2.1将切换冲突调度表处理,如下图:
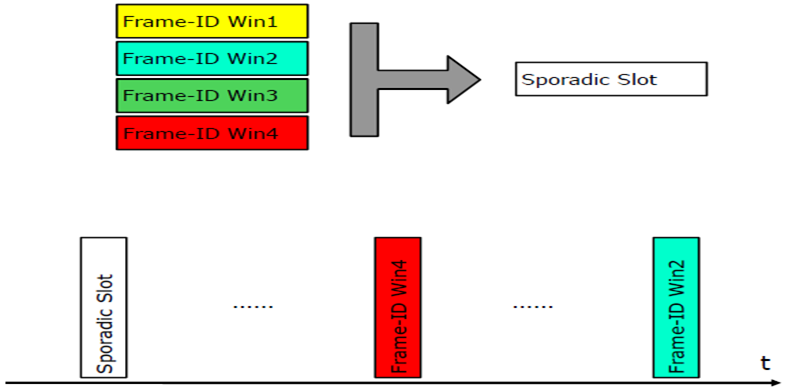
3)零星帧(偶发帧(Sporadic Frame))
引入零星帧的目的也是为了节省带宽,如:BCM(Master)需要发送对4个车窗的控制指令,但是,两个车窗的控制命令很少被同时执行,同样大量的带宽被浪费。
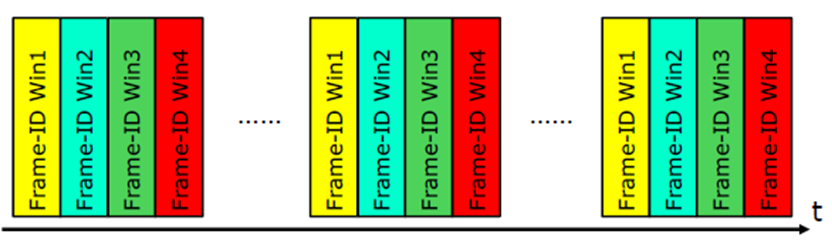
具体方案如下:
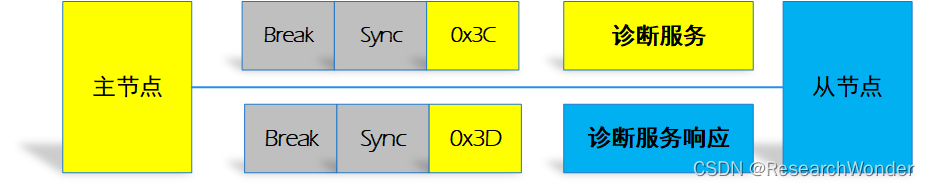
4)诊断帧(0x3C,0x3D) --- 常用
诊断帧用来传输诊断或配置信息,一般包含8个字节。
标识符:
60(0x3C):主请求诊断帧
61(0x3D):从响应数据帧
0X3C,0x3D 都是主机发送。
传输方式:
5)保留帧
标识符: 62(0x3e), 63(0x3f)
在LIN 2.1中未对保留帧进行定义, 留给用户自定义或将来的版本升级。
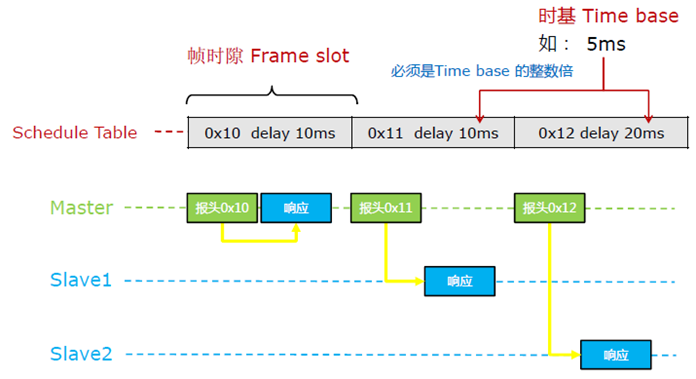
9、调度表
响应:表示数据场 即 数据段
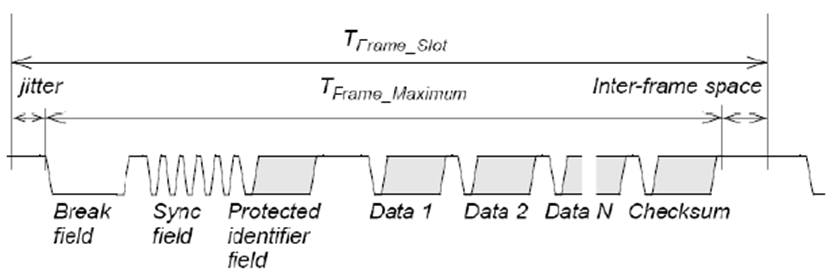
10、偏移
偏移(jitter)是指一帧报文实际开始发送的时刻与帧时隙起点的时间差(该值在LDF文件中定义)。
TFrame_Slot> jitter + TFrame_Maximum
11、网络管理
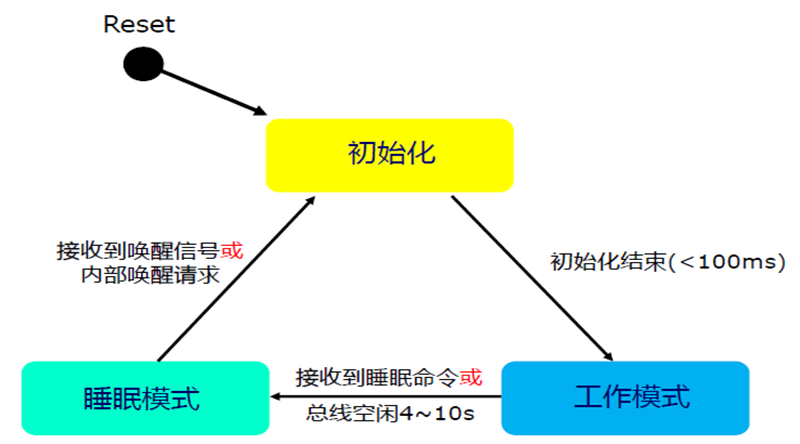
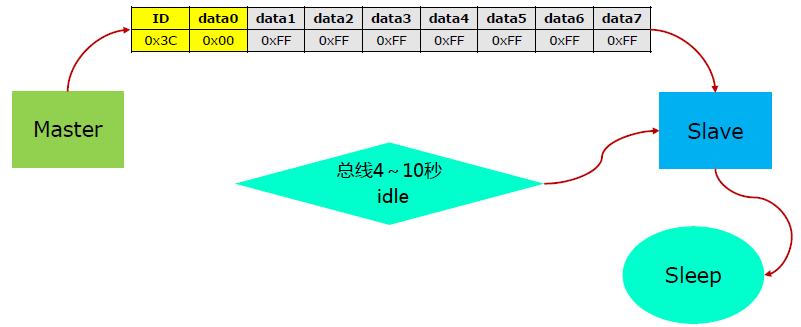
12、睡眠(Go To Sleep)
睡眠指令只有主节点可以发送,从节点在接到睡眠指令之后,也可以选择不进入睡眠状态而继续工作,这根据应用层协议而定。
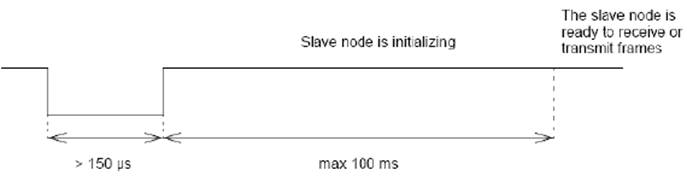
13、唤醒(Wake Up)
在一个处于睡眠状态的LIN网络中,任何一个节点都可以发送唤醒信号。
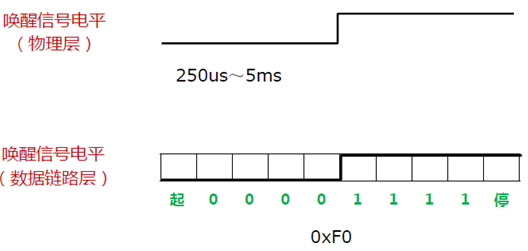
发送节点发送的唤醒信号:
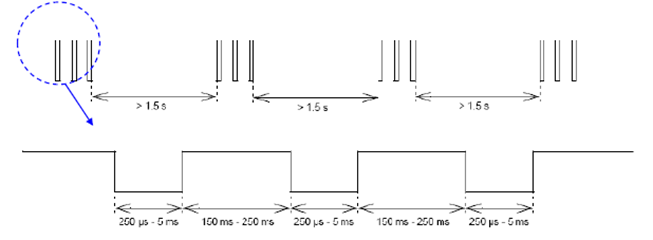
接收节点检测的唤醒信号:
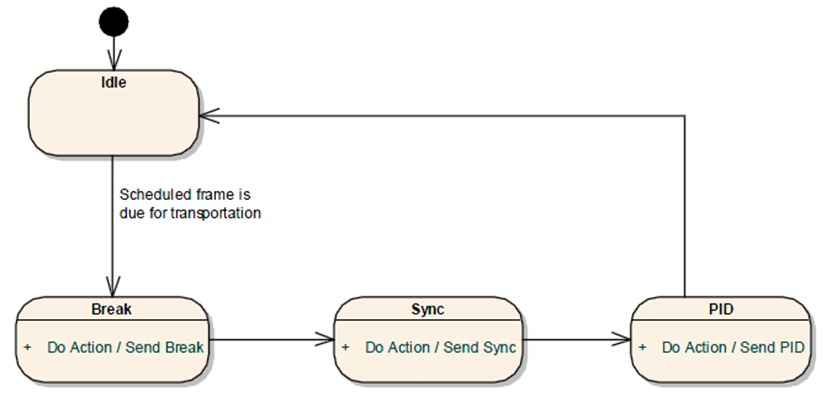
14、主任务状态机模型
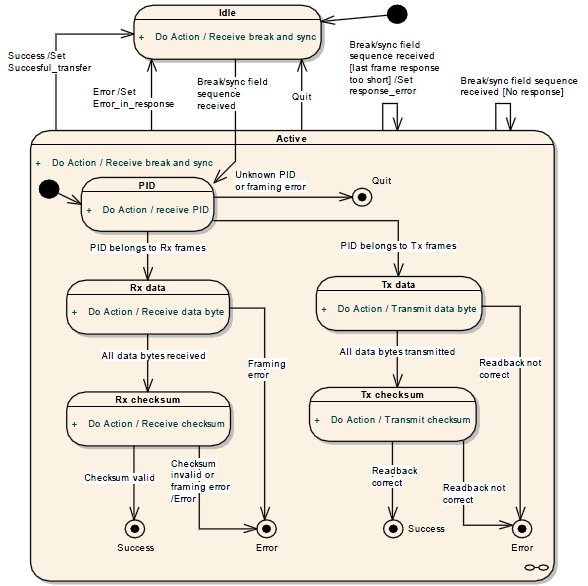
15、从任务状态机模型

















 615
615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









