










傅里叶变换到S变换的过程脉络?
众所周知,傅里叶变换只能将时间域的信号整体变换到频率域,将信号的频率成分和分布表示出 来,虽然使信号拥有了频率分辨率,却丢失了时间分辨率,不能反映出信号的频率特征随时间的变化情况。
为了解决这一问题,Gabor提出了在时频域内分解一维信号的方法,即短时傅里叶变换,短时傅里叶变换中最具代表的为Gabor变换。Gabor 变换选取高斯窗作为窗函数,在信号的每一小段时间间隔内进行傅里叶变换变换,该窗口在时间轴上进行平移,对每一段信号进行局部傅里叶分析后,再将变换得到的频率信息放到时间-频率 的二维平面上,从而得到时频谱。Gabor 变换选取高斯函数作为窗函数的优点在于高斯函数的傅里叶变换还是高斯函数,不会对变换结果产生不良影响,可以同时提供时域和频域局部化的信息。另外,根据Heisenberg测不准原理,变换得到的结果不能同时拥有极高的时间分辨率和频率分辨率,这极大程度的影响了分析结果的好坏。而高斯函数窗口面积已达到测不准原理下界,能兼顾时间轴和频率轴的分辨率。Gabor 变换的基函数不能成为正交基, 为保证不丢失信息,只能采用非正交基参与信号分析,使得计算复杂度更高。Gabor 变换的窗口固定不变,无法针对高低频信号给出可以调节的时频窗,割断了频率与窗口长度的内在联系;对短时突发信号进行分析时,可能产生时间或频率上的模糊现象。
Morlet大佬从短时傅里叶变换中推出小波变换,能对信号同时在时间域和频率域内进行局部化分析。与傅里叶变换不同,小波变换有两个变量:尺度和平移量。尺度控制小波函数的伸缩,平移量 控制小波函数的平移。尺度就对应于频率(反比),平移量就对应于时间。尺度增大,则时窗伸展,频宽收缩,带宽变窄,中心频率降低,时间分辨率降低而频率分辨率增高;尺度减小,则相反。这符合实际问题中高频信号持续时间短、低频信号持续时间长的自然规律。小波变换能准确反映待测信号的幅频特性。在小波变换中,时频窗口的长度和宽度随着参数尺度的变化而变化。但是一旦基本小波被选定,就必须用它来分析所有待分析的数据。
Stockwell结合短时傅里叶和小波变换提出Stockwell变换,即S变换。S变换相对于小波变换的不同在于其公式中加入了相位项,用于进行相位校正。它与小波变换一样存在基本小波,其基本小波由简谐波函数与高斯函数相乘组成, 其中,简谐波函数在时间域内作伸缩变换,而高斯函数则作伸缩和平移变换。S变换既克服了短时傅里叶和小波的不足,也继承了它们的优点。但是S变换的窗函数随频率以固定的趋势改变,基本小波一经选定无法更改,因此广义S变换出现,通过各种可调的属性参数控制窗函数,使其具有更高的适应性。
除了同步压缩类时频分析方法,还有哪些高分辨率时频分析方法?
稀疏反演时频分析类
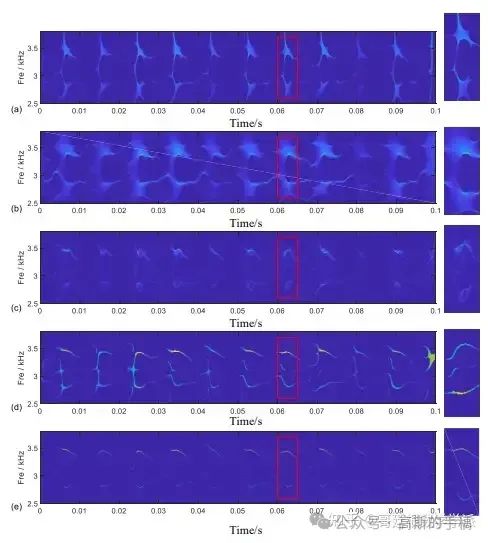
基于瞬时频率的思想,稀疏反演时频分析方法认为在时频平面上,每一时刻振幅谱能量的极大值点是瞬时频率,然后通过稀疏约束反演的方法得到极大值点;代表方法包括以l1范数约束的短时傅里叶变换、lp范数约束的短时傅里叶变换等,这类算法的时频分辨率较高,但仍处于探索阶段。
对于稀疏反演类时频分析方法,稀疏约束能力是决定时频分辨率的关键。已知稀疏能力最好的范数是l0范数,但是其求解困难,在实际中一般使用l0范数的最优凸近似-l1范数代替求解,这将导致稀疏约束能力的下降,继而降低了时频分辨率。
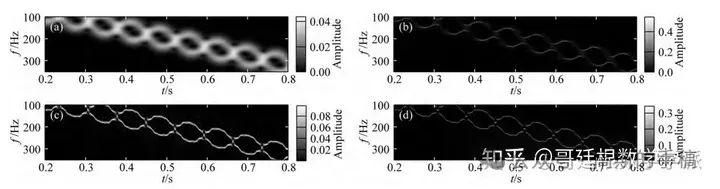
图a,b,c,d分别为短时傅里叶变换,同步压缩短时傅里叶变换,l1范数约束的短时傅里叶变换,l12范数约束的短时傅里叶变换。
在时频分析中,衡量时频谱图能量聚集程度的指标有哪些?
用的最多的是Renyi熵,Renyi熵是一种衡量时频面能量聚集程度的指标, 其值越低表明该处理结果脊线的能量越集中,可以自己测试一下。
变分模态分解是如何被提出的?
受同步压缩小波变换SST中的同步分析和经验小波变换EWT中频域搜索思路,Dragomiretskiy大佬提出了变分模态分解VMD。VMD方法首先在时域构造一个共同优化的目标,该目标在所有成分完全重构原信号的约束下追求所有成分的带宽总和最小(窄带假设)。实际上,该共同优化目标被转换到频域内通过交替乘子法ADMM求解。在频域上,该方法可以看作是对原信号中所有成分频谱系数和中心频率的共同搜索。
VMD由于 其频域内严格的窄带约束,共同优化以及傅里叶逆变换的使用,其分解成分具有更加细 致的频率分辨,并且分解出的模态分量更类似于调幅载波正弦的形态。这进一步使得 VMD 具有更高的噪声鲁棒性,对中心频率的估计也比EWT 更加准确。
柱塞泵故障振动信号如何进行时频分析?
泵发生故障时,振源信号通过壳体振动产生压力波并在空气中传播形成噪声。故障类型不同时,声音信号的声压级存在差异,信号隐含特征也必然有所不同。因此,对声音信号进行监测并进行数据挖掘,即可从信号中提取到与故障状态相匹配的敏感特征参量,实现故障诊断。
考虑到轴向柱塞泵的实际应用环境,在自然环境测试中,由于不可避免地存在机械传动噪声、环境噪声等背景噪声干扰,当声音传感器距离声源较远时,监测的故障映射信号会被背景噪声淹没,因此需采用近声场测量法,以获取较高信噪比的声音信号。
试验时,可将传声器安放在泵回转轴线的水平面高度处,在泵身周围不同位置处进行多点测量,找出声压级最大的点作为测点,将传声器悬挂于测点处并在其端部安装风罩以降低环境风噪声的影响,最后通过数据采集系统对不同工况下的声音信号进行采集。
声音信号采集
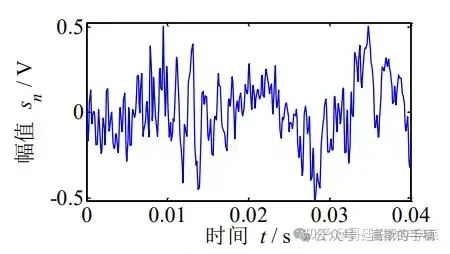
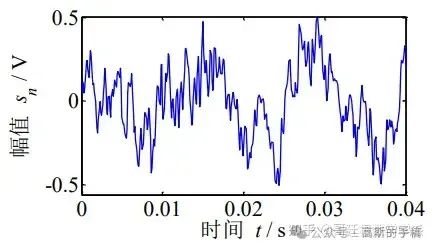
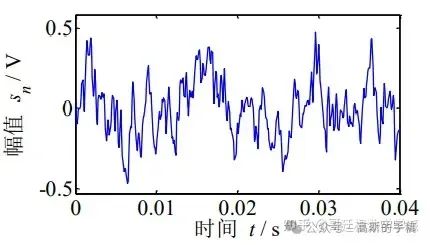
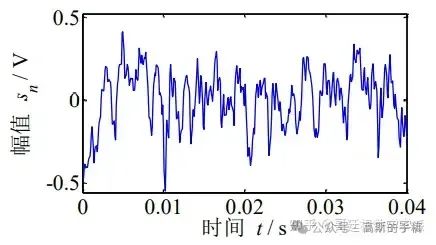
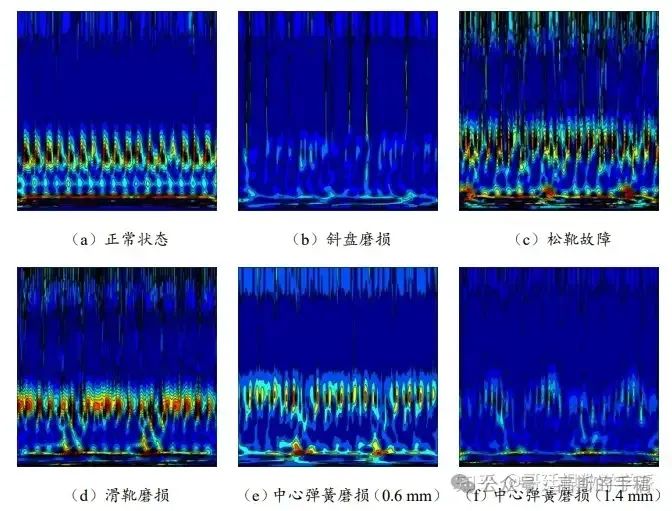
以工作压力15MPa、采样频率10kHz参数设置为例,采集到的轴向柱塞泵不同状态下的声音时域信号如下图,为便于视觉观察,在此仅呈现1个周期内(约 0.04 s)的声音时域波形。
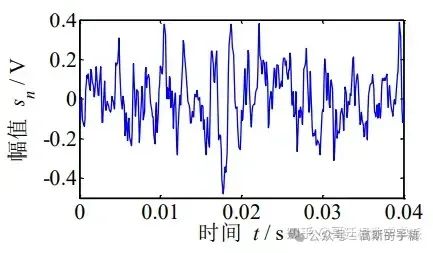
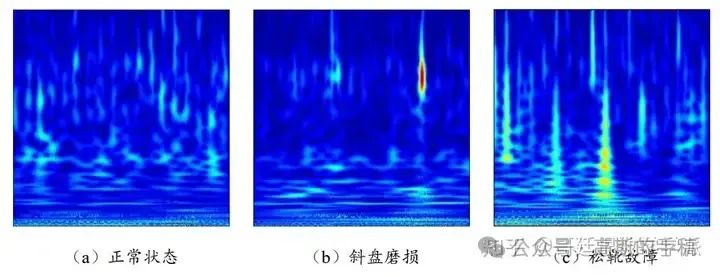
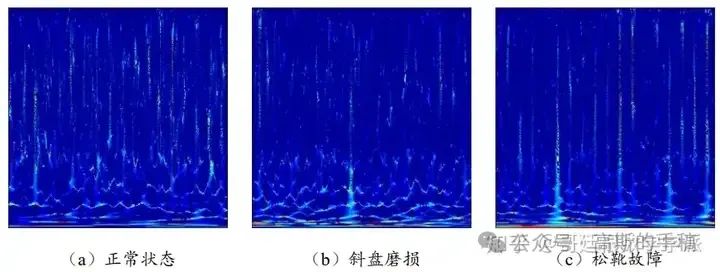
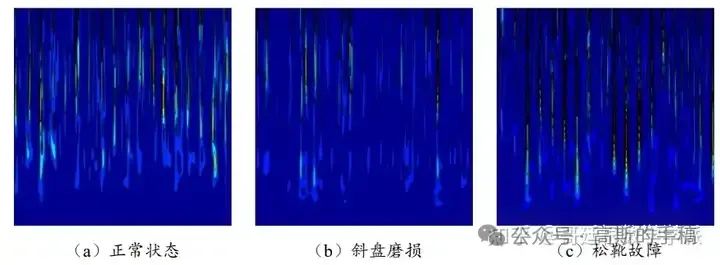
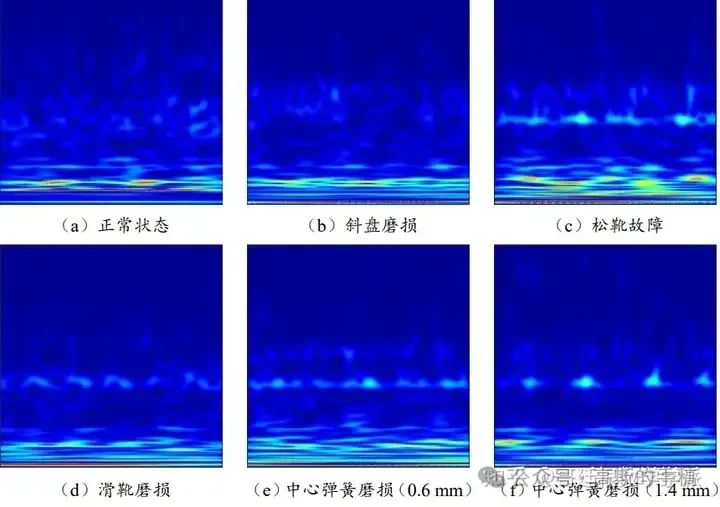
正常状态
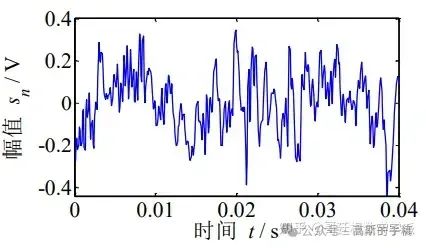
斜盘磨损
松靴故障
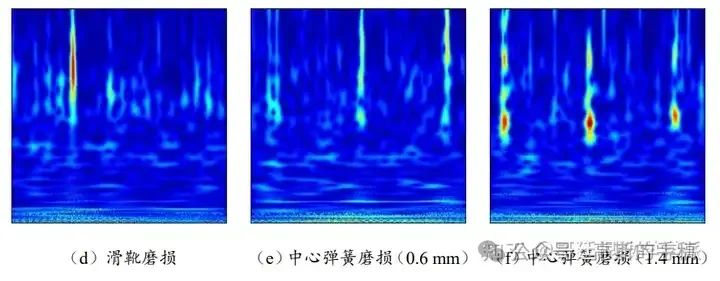
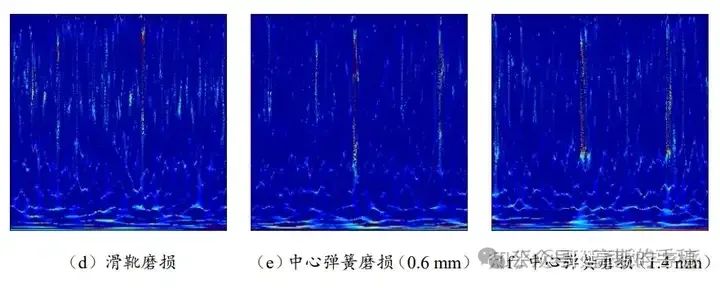
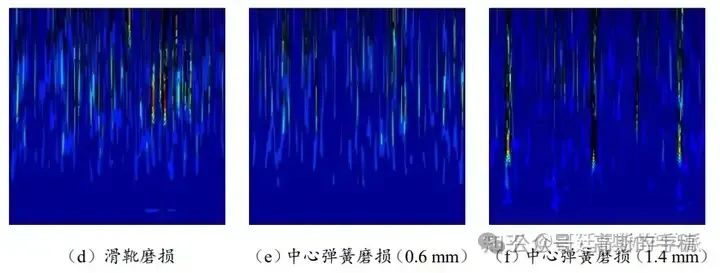
滑靴磨损
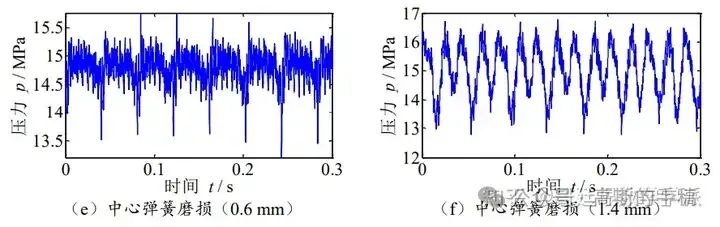
中心弹簧磨损(0.6 mm)
中心弹簧磨损(1.4 mm)
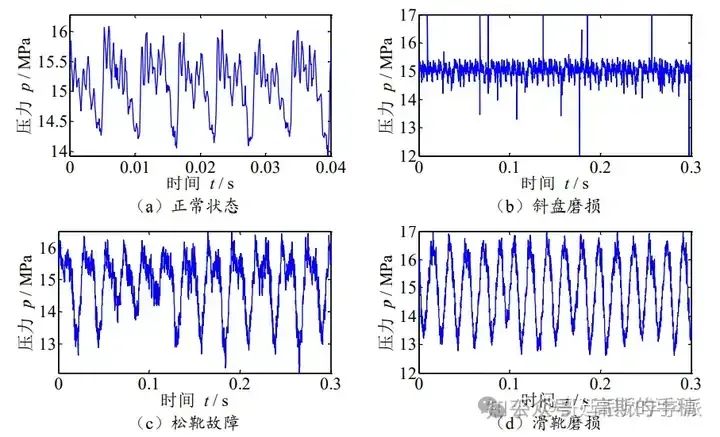
压力信号采集
当泵发生故障时,其内部流体振动将发生变化,故障类型不同时流体振动频率存在差异,压力信号隐含特征也必然有所不同。因而对压力信号进行监测并进行分析处理,亦可实现对轴向柱塞泵的状态特征提取和故障识别。以工作压力15MPa、采样频率10 kHz参数设置为例,采集到的轴向柱塞泵不同状态下的压力时域信号如下图所示。为便于视觉观察,正常状态仅呈现 1个周 期内(约0.04s)的压力时域波形,其他4种典型故障状态呈7 个周期内(约0.3s)的压力时域波形。
CWT变换
同步压缩变换
S变换
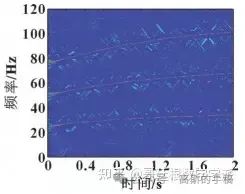
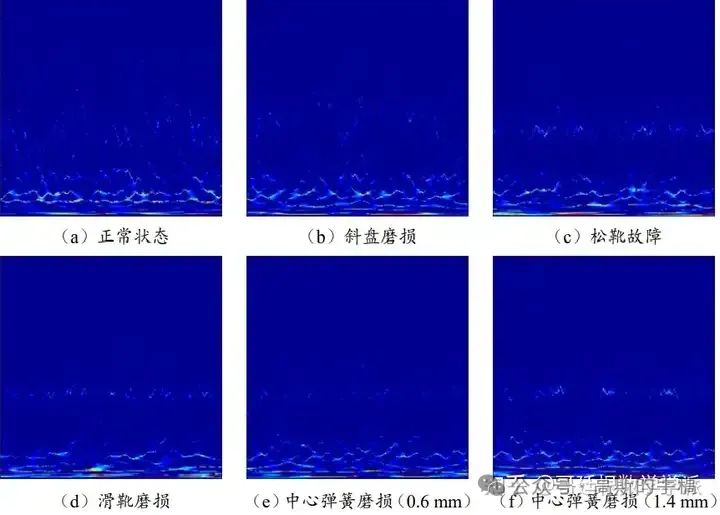
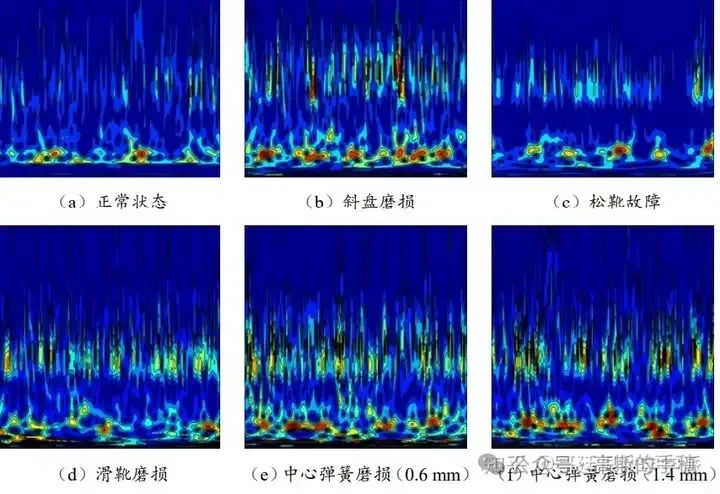
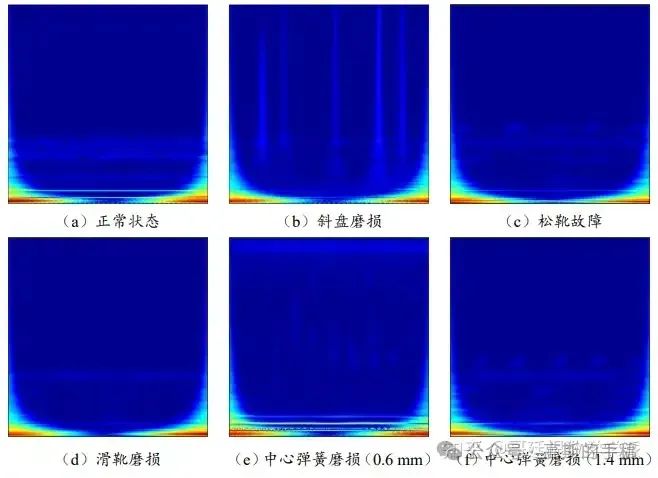
声音信号时频域变换
(1)CWT变换
(2)同步压缩小波变换
(3)S变换
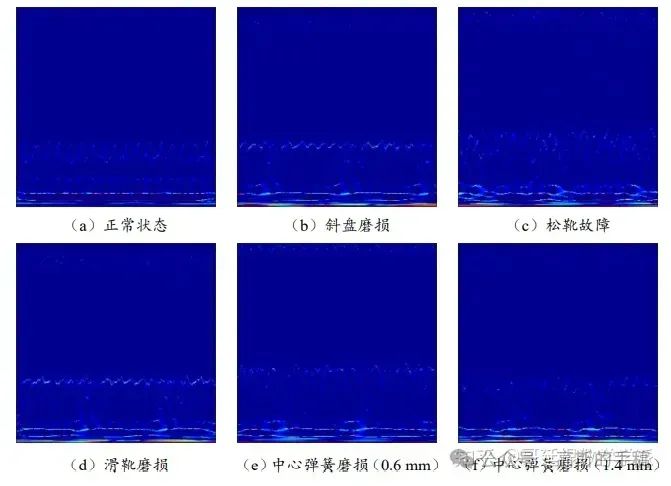
压力信号时频域变换
(1)CWT变换
(2)同步压缩小波变换
(3)S变换
现有时频分析方法在机械故障诊断中存在的缺陷?
(1)机械设备常具有复杂的动力学系统,且运行环境相对嘈杂,测得的振动信号常受到各种因素的影响,如动力学系统内部结构参数的变化、信号传递路径的变化等,因此蕴含着设备运行状况的信息常被淹没在强调幅调频的成分中, 且受到噪声的影响,振动信号的动态特征难以得到有效的表征。
(2)机械设备运行时常存在变转速、变工况的情形,如风力发电机、航空发动机等,当设备变转速运行时,各部件的故障特征频率也会随时间发生变化,这造成了故障识别的困难,同时由于时变的动态特征,限制了许多信号处理及机器学习方法的应用。
(3)机械设备发生故障时,如转子碰摩、轴承故障、齿轮故障等,缺陷信号常伴随着典型的冲击特征,由于故障冲击发生在极短的时间内,因此在时频分布上表现出宽频带的特征,使得信号的群延时难以得到准确的表征,即无法捕获故障冲击发生的准确时刻。
(4)含临近成分的多分量信号地处理问题。在工程实践中,从旋转机械设备上捕获的振动信号常具有临近的分量,尤其是当设备转速较低时,故障特征频率会受到其他临近的调制成分的干扰因而难以被有效的提取。
在信号时频分析的研究中,为什么需要引入高阶算子?
以机械信号处理为例进行说明。
在实际的机械设备的故障信号处理中,往往需要处理更多复杂的非平稳信号,受强调幅调频成分的影响,对信号时变规律的二阶估计可能无法满足实际情况的需求。如变转速工况下运行的风力发电机,采集到的缺陷信号的瞬时频率往往表现出典型的非线性变化规律。实际上,即使是处于平稳状态下运行的旋转机械设备中,当设备故障发生时,如轴承故障,当滚动体通过外圈或内圈的缺陷处时,可能会导致故障所在轴的瞬时转速的降低。瞬时转速的降低会导致瞬时故障特征频率的降低。因此,当旋转机械设备如轴承的故障发生时,不仅会伴随周期性的调幅分量,周期性的调频现象同样会发生。且这种调频规律往往是非线性变化的。
如果将信号进行高阶泰勒展开,代入到原始的时频表示(CWT,STFT)中,会发现原始的频率估计算子与信号真实的瞬时频率之间存在一个较大的误差,这个误差导致一些采用低阶近似的时频表示技术难以有效地处理强调幅调频信号。为准确地表征强调幅调频信号的时变规律,可以在原始频率估计算子的基础上采用高阶近似,构造出高阶频率估计算子,高阶频率估计算子可以准确地提取出强调幅调频信号的瞬时频率。
机械振动信号示例如下:
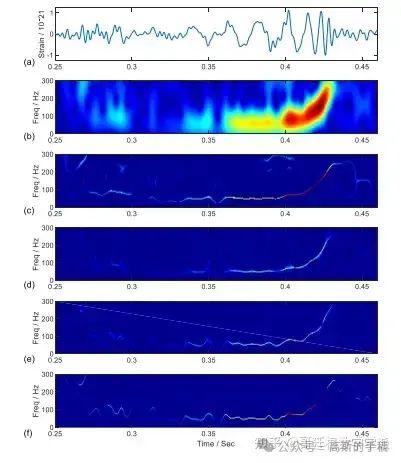
引力波信号示例如下:
知乎学术咨询:
工学博士,担任《Mechanical System and Signal Processing》等期刊审稿专家,擅长领域:现代信号处理,机器学习,深度学习,数字孪生,时间序列分析,设备缺陷检测、设备异常检测、设备智能故障诊断与健康管理PHM等。
















 545
545

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











