






本文主要参考《Applied Nonlinear Control》(Slotine,Li等著)这本书。如有错误疏漏,烦请指出。如需转载,请联系笔者,Dr.shenyue@http://gmail.com。
沈月:(6)基于Lyapunov直接法的LTI系统分析zhuanlan.zhihu.com
一、Krasovskii's Method
在基于Lyapunov直接法的控制系统分析(一)文中,我们提到
李雅普诺夫直接法(Lyapunov’s Direct Method)虽然能给我们判断系统稳定性,但有个最大的一个问题是:定理里面没有告诉我们怎么选取Lyapunov Function Candidate--V(x)。如果研究者面对的是具体的物理系统,V(x)都不知道怎么选,就更不用说利用Lyapunov Theorem和La Salle's Invariance Principle来分析系统的稳定性了。
并分析了LTI(Linear Time-Invariant)系统的V(x)选取。本文我们将给出不依赖时间的非线性系统(Autonomous Nonlinear System)的V(x)的选取,叫做Krasovskii's Method(不要问我中文名,真的不知道)。不多说,直接摆出结论了。
Krosovskii Theorem:平衡点在原点0的不依赖时间的非线性系统(Autonomous Nonlinear System)
Remarks:
-
负定,也就是二次型
- 该定理也是针对平衡点0来做出的稳定性结论,不是基于Lyapunov直接法的控制系统分析(一)文中提到的更一般的不变集。
- 以上定理同样可以扩展到Global Version。如果
是整个状态空间,额外满足Lyapunov函数与稳定性判别文中提到的V(x)要求的radially unbounded,那么系统就是全局稳定。
- 定理很简单,但是在实际控制系统设计以及各控制种理论界高端Journal中,该定理很少被用到。因为很多系统的Jacobian并不满足
负定的要求。
Generalized Krasovskii Theorem: 平衡点在原点0的不依赖时间的非线性系统(Autonomous Nonlinear System)
Remarks:
- 以上定理同样可以扩展到Global Version。如果
是整个状态空间,额外满足Lyapunov函数与稳定性判别文中提到的V(x)要求的radially unbounded,那么系统就是全局稳定。
二、The Variable Gradient Method
The Variable Gradient Method是1962由普渡大学的D. G. Schultz提出来的,也是用来构造V(x)。此方法也是很少被用到,要求满足the so-called Curl Condition
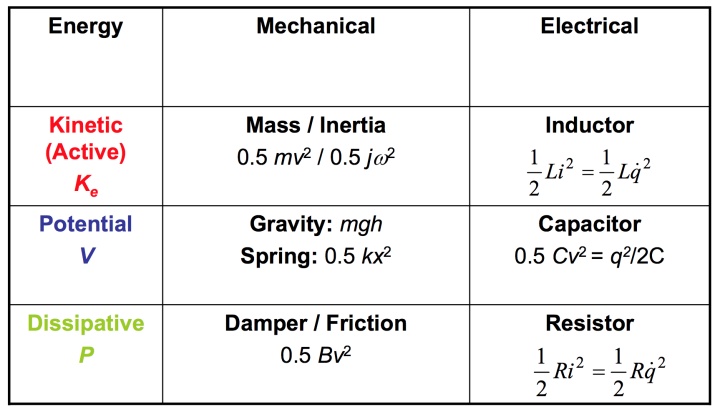
三、Physically Motivated Lyapunov Functions
基于物理直观的Lyapunov Function选取,这大概是目前针对非线性系统最常用的Lyapunov Function选取方法,因为Lyapunov Function本来就是代表一种能量,而我们实际非线性系统在物理学上都能有对应的能量,如下图(图片来自Riadh Habash在ELG4125: Electric Power Transmission and Distribution Systems课上的lecture notes:Lagrange Equations)
四、总结
在基于Lyapunov直接法的控制系统分析(一)提到的方法,加上本文中的Krasovskii's Method, Physically Motivated Lyapunov Functions这三个方法,是最常用的构造V(x)的方法。关于Lyapunov Function的构造就讲到这里了,有个控制系统的研究方向就是constructive nonlinear control,是专门如何构造Lyapunov Function。其他的小众还有很多,比如Zubov’s Method(Methods of A. M. Lyapunov and Their Application), Method of Szegö(On a New Partial Differential Equation for the Stability Analysis of Time Invariant Control Systems), Method of Ingwerson(A Modified Lyapunov Method for Nonlinear Stability Analysis),就不一一赘述了,大家有兴趣可以自己查阅。















 2351
2351











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









