






声明:本文首发于我的公众号【当SLAM遇见小王同学】,谢绝私自转载,如有需要,可加我微信进行授权!!
本人 研究方向为SLAM、移动机器人、多传感器融合等.
公众号日常更新IEEE、CVPR、IROS等最新论文,以及本人自大二开始学习SLAM的踩坑记录、源码解析.
欢迎关注!
标题: A Robust Laser-Inertial Odometry and Mapping Method for Large-Scale Highway Environments
作者: Shibo Zhao, Zheng Fang, HaoLai Li, Sebastian Scherer
摘要
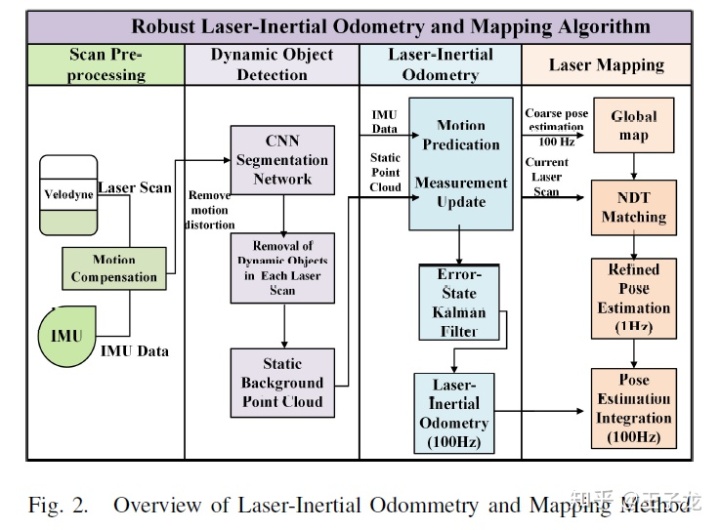
我们提出了一种新的激光惯性里程计和建图方法,以实现大规模公路环境中的实时、低漂移和鲁棒的位姿估计.该方法主要由四个顺序模块组成:Scan预处理模块、动态目标检测模块、激光惯性里程计模块和激光建图模块.Scan预处理模块使用惯性测量来补偿每次激光扫描的运动失真.然后,动态目标检测模块用CNN网络从每次激光扫描中检测和去除动态目标.激光惯性里程计模块在获得无运动物体的无畸变点云后,利用卡尔曼滤波器融合激光和惯性测量单元的数据,高频输出粗略的位姿估计.最后,激光建图模块使用“帧到模型”扫描匹配策略来创建地图.
我们使用KITTI数据集和真实的高速公路场景数据集,并且比较了我们的方法与两种最先进的方法:LOAM和SuMa的性能.实验结果表明,在真实的高速公路环境中,该方法的性能优于现有的方法,在KITTI数据集上取得了不错的精度.
高速公路环境给传统的激光SLAM算法带来了许多挑战.例如:
- 高速:通常自主车的速度至少可以达到70km/h,会造成每帧点云失真,影响精度.
- 缺少几何特征:大多数公路环境缺少垂直方向的几何特征,有些地方缺少forward约束,如长走廊场景.
- 高度动态的环境:几乎一直以来,当前的激光扫描都受到动态物体的负面影响.
- 较少的闭环区域:由于在高速公路环境中闭环区域较少,闭环检测策略很难校正估计的轨迹.
目前大多数基于激光的SLAM方法都假设周围环境是静态的.此外,由于这些方法仅依赖于激光扫描仪提供的数据,它们很难处理几何退化环境中的剧烈运动的影响.由于这两个限制,这些方法难以在高速公路场景中提供鲁棒和准确的运动估计.
受上述讨论的启发,在这项工作中,我们提出了一种新的激光惯性里程计和建图(LIOM)方法,它不仅实现了鲁棒的姿态估计,而且在高速公路环境中建立了静态地图,如图1所示.
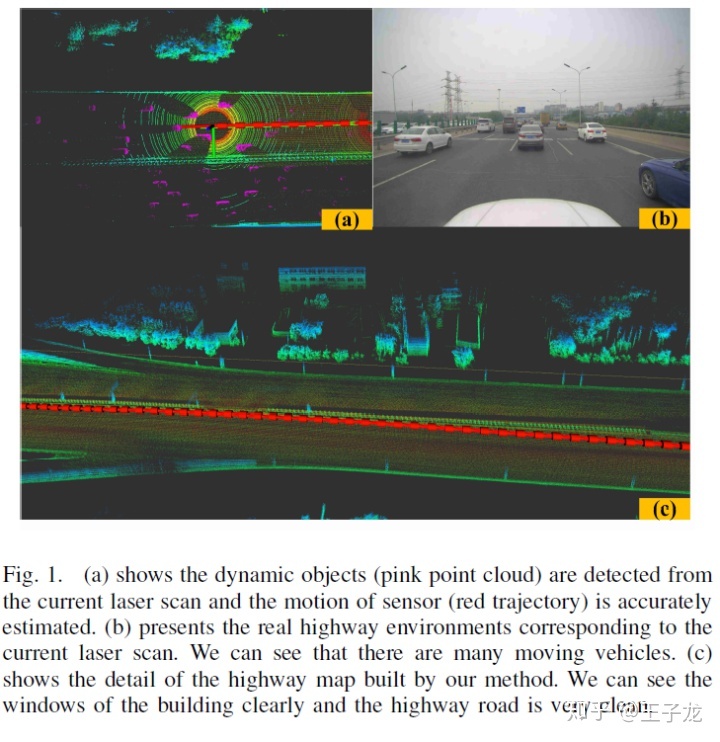
(a)显示了从当前激光扫描中检测到的动态物体(粉色点云),并且准确估计了传感器的运动(红色轨迹).(b)呈现对应于当前激光扫描的真实公路环境.我们可以看到有许多移动的车辆.(c)显示了通过我们的方法构建的公路地图的细节.
系统
实验
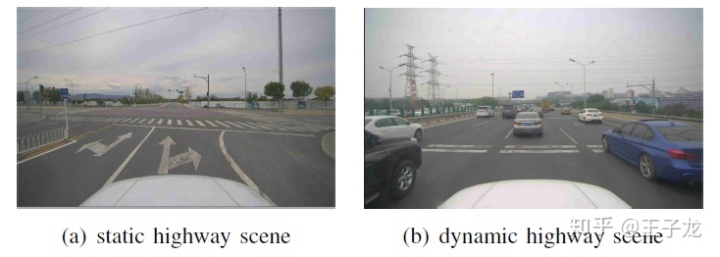
我们在dynamic05数据集上进一步测试了我们的算法、LOAM算法和SuMa算法的性能.车辆从高速公路行驶到市区,行驶4.58公里,测试期间速度在13.7米/秒至20米/秒之间.激光扫描的每一帧都受到大量移动车辆的影响,如图4(b)所示.
为了评估我们的LOAM和SuMa算法的鲁棒性,我们使用激光测量的原始数据,并比较构建的地图的质量.结果分别示于图6(a)、图6(b)和图6(c).
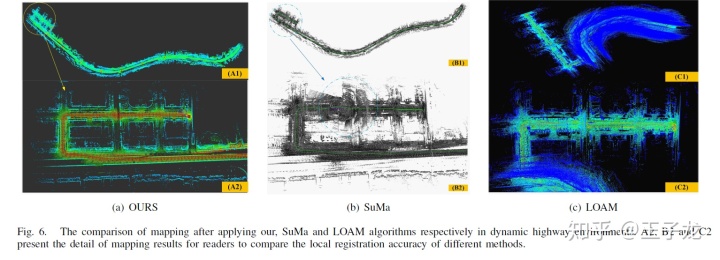
在图6(A1)中,我们显示了用我们的方法构建的公路地图,黄色圆圈表示地图的细节,如图6(A2)所示.图6(A2)中的红色轨迹表示车辆的估计运动.沿着红色的轨迹,可以看到汽车从高速公路向市区行驶.地图的细节总是很清晰.这表明,我们的方法是非常鲁棒的,可以克服移动对象的影响.然而,由SuMa算法构建的公路地图不是很好,用蓝色圆圈标记的点云失真如图6(B2)所示.这是因为SuMa无法区分静态和动态对象.因此,运动物体可能在连续的激光扫描中引起错误的表面,并影响姿态估计的鲁棒性.图6(C2 C1)显示了由LOAM算法构建的地图.我们发现地图模糊不清,说明LOAM算法也无法克服运动物体的影响.此外由于车辆从高速公路行驶到市区,几何特征的数量变化很大.在图6(C2 C1)中,城市地区的地图比公路地图好得多,这表明LOAM算法严重依赖于几何特征.我们还比较了姿态估计在其他动态数据集(01-04)上的性能.在测试过程中,我们使用绝对轨迹误差(ATE)来评估每种方法的准确性,所有序列都是与地面真实情况对齐的6自由度.结果显示在图8和表1中.结果表明,我们的方法在实际的公路环境中比最先进的方法:LOAM和SuMa表现得更好.
接下来,我们评估了我们在KITTI数据集上的方法图7展示了由我们的方法在KITTI00序列上构建的图.一些闭环区域(A)-(D)用红色方块标记.仔细检查这些闭环区域,我们可以看到B区域只有很小的点云失真,这表明我们的方法在城市环境中也可以实现精确的姿态估计.
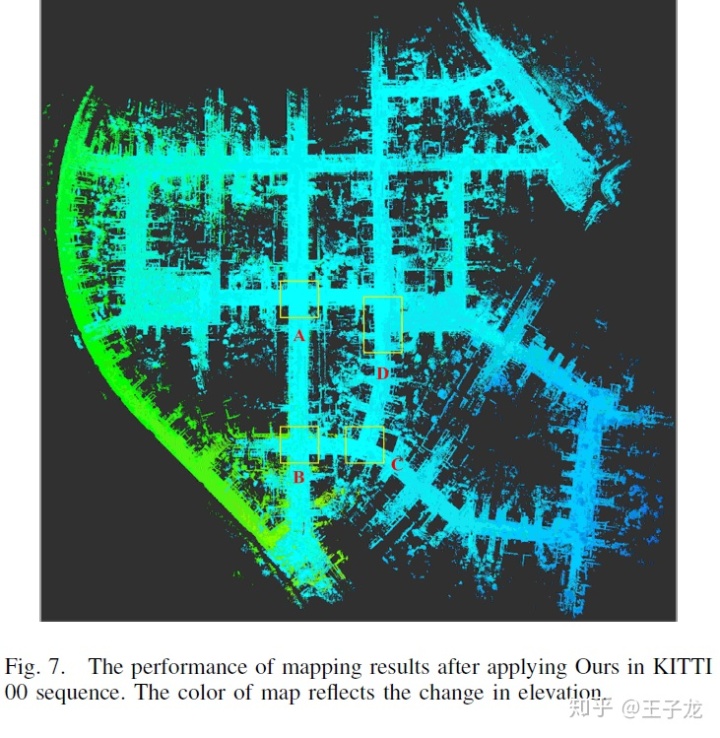
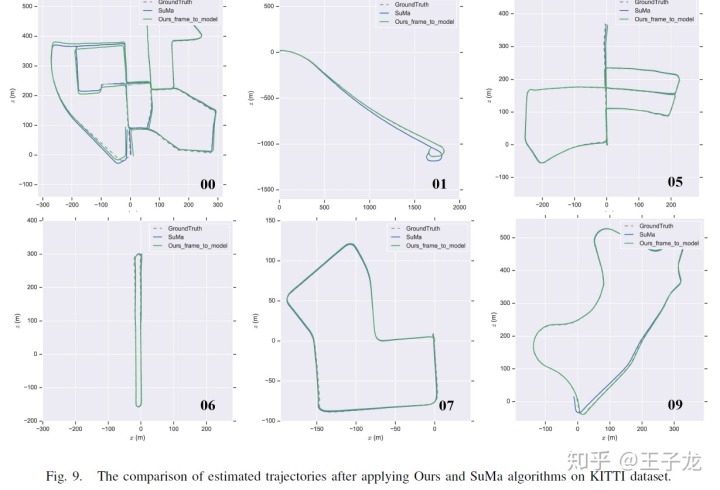
图9展示了我们的算法和SuMa算法在KITTI数据集上的轨迹比较.表二列出了在不使用地图(帧到帧)、使用地图(帧到模型)、LOAM和SuMa算法的情况下,所提出的方法的姿态估计的精度比较.可以看出,我们的方法获得了平均0.85%的误差,相比之下,分别为0.81%和0.88%.这表明我们的方法可以实现最先进的性能.特别是在KITTI01序列(高速公路环境)上,该算法的相对平移误差仅为1.0%,而LOAM和SuMa算法的相对平移误差分别为1.4%和1.7%.这表明与其他两种方法相比,该算法在高速公路环境下具有更好的鲁棒性.
我们使用3.2 GHz i7、GeForce GTX 1050 Ti测试了我们的算法.对于图6中的实验,我们使用体素化网格方法对每次激光扫描的点云进行下采样,运行时性能如表三所示.所有列出的模块都将在不同的线程上运行.
结论
本文提出了一种适用于高速公路环境的鲁棒激光惯性和建图方法,该方法利用CNN分割网络和激光惯性框架,实现了大规模高速公路环境下的实时、低漂移和鲁棒位姿估计.大量的实验表明,该方法在高速公路环境下的性能优于现有方法,在KITTI数据集上达到了相似或更高的精度.未来,我们将尝试利用激光、相机和惯性测量单元实现传感器融合,以进一步提高算法的鲁棒性.















 242
242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









