






目前无人驾驶汽车以及汽车安全辅助驾驶技术是近几年的研究热点。针对汽车在城市拥堵道路上低速运行时完全自动驾驶安全性问题,重点研究了基于双目立体视觉行车中障碍距离检测方法。
该方法首先根据双目标定理论获取左右摄像机的内外参数和畸变系数,再进行双目图像校正与匹配,然后根据左右图像中目标点的不同坐标得出视差,最后利用三维重建方程组得出障碍物的距离。实验结果表明:该方法对汽车前方 5 米左右的障碍物检测精度高,距离误差小,能在城市复杂交通环境中及时作出相应的反应,有效避免交通事故的发生。
视觉作为汽车重要的环境感知手段已经得到了越来越多的研究。视觉感知的研究主要包括基于视觉的定位,基于视觉的道路和交通标志检测与识别和基于视觉的避撞技术。单目视觉测距系统相对于双目视觉测距系统而言,由于单目获取的信息量比较少,仅靠标定后的单目相机来测距并不能准确获取目标距离,因此对于双目测距国内外的研究也越来越多。
1.双目立体视觉测距系统,更好的模拟人眼功能
在国外,就是利用双目视觉获取被检测车辆的深度信息,再用 Kalmam 滤波对被检测车辆在图像坐标系和世界坐标系中进行跟踪。基于双目视觉系统,提出了对运动目标的检测方法,并能很好测出运动目标深度信息和速度大小,该方法能够较好获得运动目标的轮廓和速度。
通过双目立体视觉系统对牌照特征进行提取以及获取中心坐标来匹配相应的牌照对,然后利用 3D 重建方程组来获取前车位置参数。而在国内,在双目视觉基础上,应用 MeanShift 跟踪算法和双目立体视觉中空间点定位算法,设计了对运动目标的跟踪和测量系统。
利用双目立体视觉系统实现了对目标的识别与定位,从而控制机器人手臂完成抓取操作。利用双目立体视觉算法获得路标信息,进而辅助全球卫星导航系统(GNSS)。
然而尽管国内外的研究人员在测量前车距离方面做了很多研究,但是目前还是基于单目视觉的测距系统居多,由于单目视觉图像的距离感知精度偏低,因此,重点研究了双目立体视觉测距系统,它能够很好地模拟人眼功能,对三维世界进行感知。
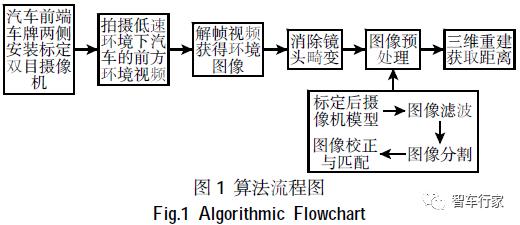
双目立体视觉测距系统主要包括摄像机标定、图像分割、立体匹配和三维重建四个部分。对摄像机标定部分做了一定的改进
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1348
1348











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









