







激光雷达(LiDAR)是一种测距技术,近年来越来越多地用于汽车先进驾驶辅助系统(ADAS)、手势识别和3D映射等应用。尤其在汽车领域,随着传感器融合的趋势,LiDAR结合成像、超声波、毫米波雷达,互为补足,为汽车提供全方位感知,为迈向更安全的自动驾驶铺平道路。安森美半导体提供这全系列传感器方案且技术遥遥领先,在单光子雪崩二极管(SPAD)和硅光电倍增管(SiPM)传感器技术是市场领袖之一,提供完整的LiDAR方案,包括系统、传感器、输出和激光驱动器方案。
安森美半导体完整的LiDAR方案
1个LiDAR系统有6个主要的硬件功能块:传输、接收、光束转向、光学器件、输出和电源管理。典型的LiDAR系统框图如图1所示。其中,安森美半导体可提供SiPM/SPAD、激光驱动器参考设计、电源管理、放大与处理以及时序、直方图、点云生成乃至系统等。成熟的模拟SiPM 产品有C系列、J系列、R系列。系统有SiPM 阵列扫描LiDAR 演示仪(超过100 m扫描距离)、把SiPM 与图像传感器融合的FUSEONE、最新的400 x 100 SPAD 阵列Pandion。
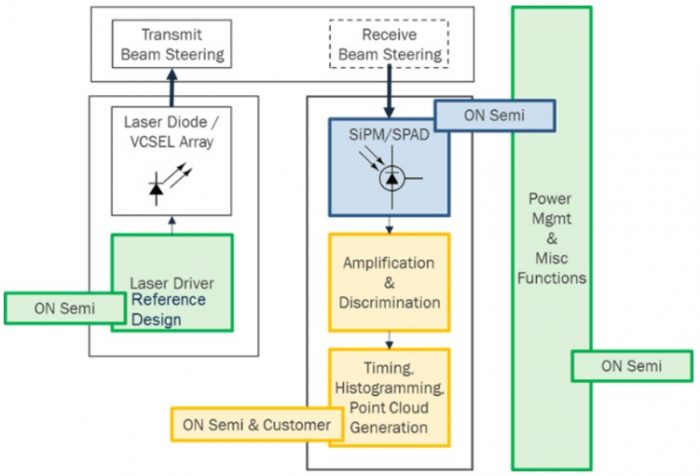
图1:典型的LiDAR系统框图
什么是SPAD、SiPM和ToF
SPAD是一种工作在盖革模式(Geiger Mode)的光电二极管,就像光子触发开关一样,处于“开”或“关”状态。SiPM是由多个独立的SPAD传感器组成,每个传感器都有自己的淬灭电阻,从而克服单个SPAD不能同时测量多个光子的不足。飞行时间(ToF)指给目标发送光脉
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









