







激光雷达系统原理及相关介绍
激光雷达系统组成
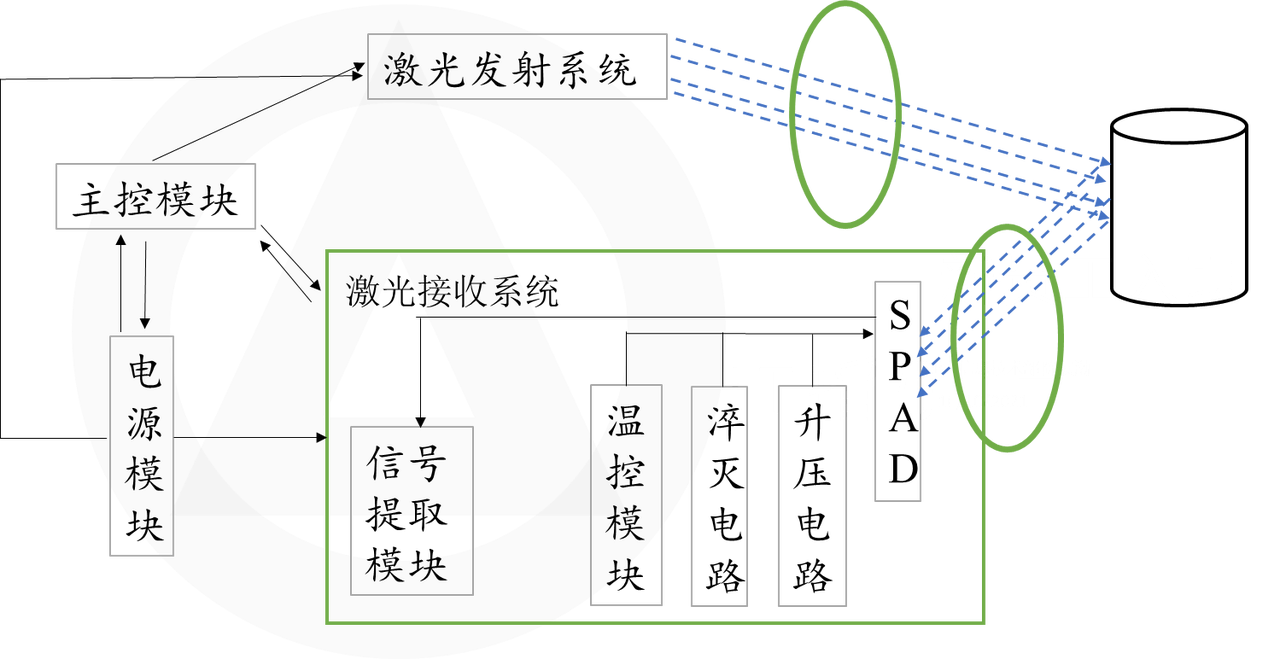
激光雷达系统主要分为四部分,分别是主控模块、电源模块、激光发射系统以及激光接收系统。主控模块即是向另外三个模块发布控制指令,并对收集到的信息进行处理和分析;电源模块则是向另外三个模块进行供电。激光发射系统中包含信号发生器、激光发射器以及透镜等。
激光接收系统则包括滤波器、衰减片、SPAD(SiPM)阵列、以及与SPAD相配合使用的温控模块、升压电路、淬灭电路以及信号提取模块。
激光雷达系统的工作原理与相关介绍
信号发生器产生信号触发激光发射器发射波长为905nm或1550nm的激光(850nm的激光雷达主要用于近距,而传统的激光雷达主要以905nm波长为主,该波长激光器件相对成熟,但可能对人眼有危害,1550nm波长较之,对于人眼安全提高40倍。除此之外,905nm波长的激光优势多多,例如成本低,技术成熟等)。激光发射后,经过透镜,照射到目标物体上。目标物体可以看做是朗伯体,即是漫反射的。
反射过后的回波信号经过窄带滤波,再经过衰减片(衰减片的透过率直接影响激光雷达的探测性能)。经过衰减片后,回波信号照射到SPAD上,此时SPAD工作在盖革模式下时,单个光子即可触发雪崩,雪崩电流极剧增大。由于连续大电流会使得APD器件发热,时间过长可能会损坏器件;更重要的是,APD工作在盖革模式下时,自持性雪崩过程无法自动结束,导致系统无法进行下一轮的接收过程。因此,需要进行淬灭,从而终止雪崩,提高APD接收速率。淬灭电路主要包括被动淬灭、主动淬灭和门控淬灭。被动淬灭主要是利用电阻分压,从而使得电压降低,使其退出雪崩状态。主动淬灭主要是通过反馈电路主动降低反向偏置电压,从而退出雪崩。门控淬灭,则是保持发射器和探测器的二者的频率相同,同时保证光子到来时探测器处于盖革模式下,光子不应该来的时候处于截止状态。该淬灭方式降低了暗计数。经过淬灭后,SPAD退出雪崩状态,经过升压电路升压后,再次工作在盖革模式下,即可再次接收。升压的这段时间无法接收,称为死时间,死时间的长度对激光雷达的性能有较大影响。
雪崩电流或其他表现形式,如电压等经信号提取后,送入主控模块进行计算,得到距离信息等。计算的方法主要有dTOF(直接时飞法)等,其余的包括三角测量法、结构光注入等。
影响激光雷达探测性能的因素
宏观上
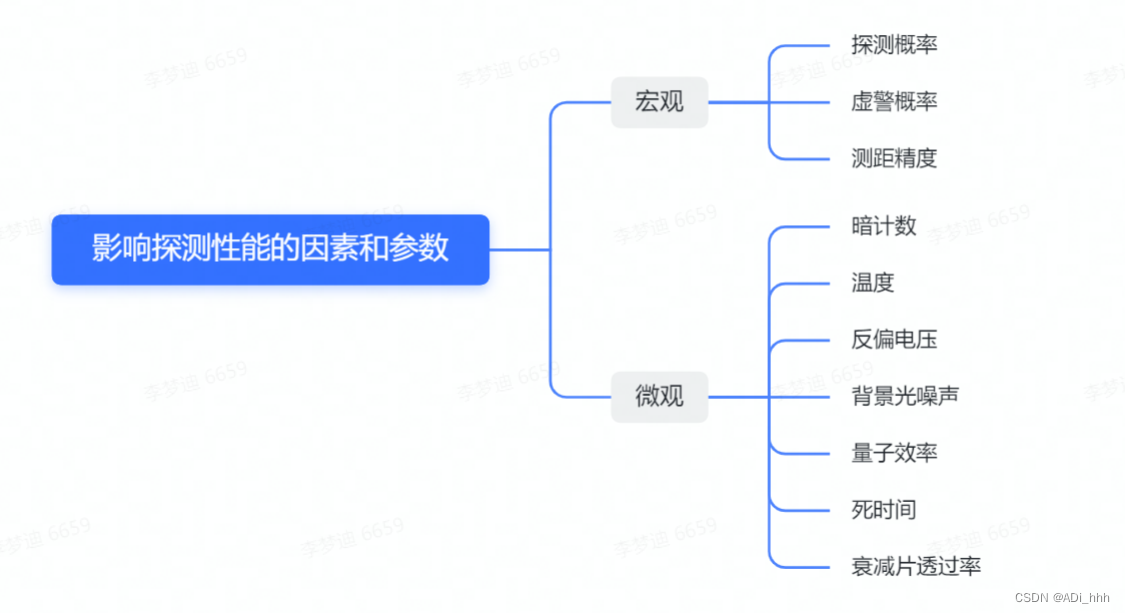
影响激光雷达系统的探测性能的因素主要有探测概率、虚警概率、测距精度、成像帧频、以及系统的紧凑小型化等。
- 探测概率主要是指在目标时间内,系统输出信息的概率。
- 虚警概率主要是在非目标时间内,系统输出信息的概率
- 测距精度则是测量距离的精度。
其中探测概率、虚警概率、测距精度都与接收系统的衰减片透过率有关,衰减片透过率越高,虚警概率越高,测距精度越差。而探测概率与衰减片透过率呈非线性关系,表现为随着衰减片透过率增大,探测概率先增大后降低。
为了提高激光雷达的探测性能,需要想方设法地降低系统中的噪声
噪声主要包括暗计数和背景光噪声。
微观上
激光接收系统中的SPAD也影响着激光雷达系统的探测性能。
影响其工作的因素和参数主要有以下几种:
-
暗计数
暗计数一般是指无光条件下,由其他噪声误触所引起的,主要是由高温激发和隧道效应 -
温度。
温度影响载流子受到的约束,工作温度越低,击穿电压越低,同时暗计数率降低 -
反偏电压差值
反偏电压值超出击穿电压值定义为Ve,该参数大小对于雪崩电压、探测效率、暗计数等都有所影响。Ve越大,探测效率增大,呈对数形式
升高反偏电压会使得内部电荷产生率升高,暗计数率升高 -
量子效率
量子效率是APD输出电子数量与接收光子数量的比值,显然量子效率越高,系统的探测效率越高。 -
死时间
死时间越大,光子计数值越低,探测效率越低

















 843
843

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









