







22年暑假实习过程中第一个开发任务,基于激光雷达实现三边定位开发功能
开发平台为ubuntu 18.04 + ros melodic
日期:2022.7.18
本次实现:由于实现三边定位需要先找反光柱的圆心,目前计划先找出激光雷达获取反光柱反射激光的最强点,该点到激光雷达的距离加反光柱半径近似于圆心,误差在于激光雷达本身精度误差,可以接受。因此,首先要找出激光最强点。
(一)准备工作
延用公司框架建立测试用的工作空间和功能包。
core——存放launch文件
HAL——存放基于硬件的算法代码
hardware——存放硬件相关的代码,这里已经存放了激光雷达的驱动程序
(二)代码编写
在HAL文件夹中新建trilateration功能包,并在其src文件下新建trilateration.cpp文件,然后开始编程
定义结构体point用于存放激光信息
struct Point {
long index;
float range;
float intensity;
float x;
float y;
};在main函数中订阅激光话题,获取激光数据,并将其传递给激光处理函数scan_CB
int main(int argc, char *argv[]) {
ros::init(argc, argv, "trilateration");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("/scan", 1, scan_CB);
ros::spin();
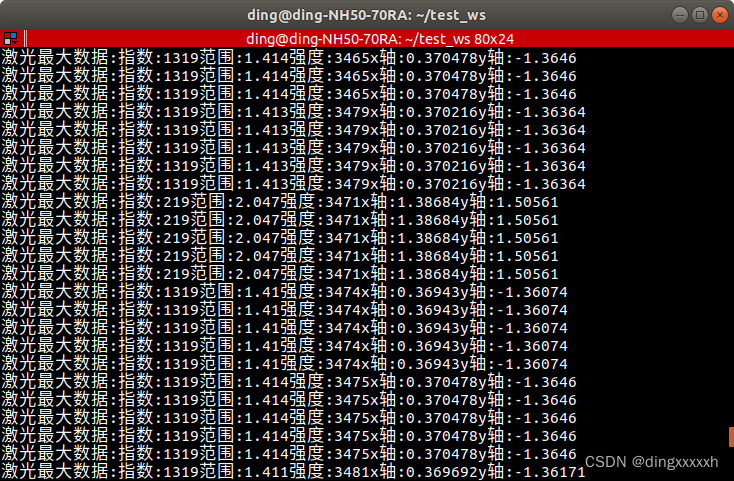
}在激光处理函数中将激光数据传递给查找激光最大值函数findMax,找出激光强度最大的点并将该点数据打印
//处理激光信息
void scan_CB(sensor_msgs::LaserScan scan) {
for (int i = 0; i < 5; i++) {
auto max = findMax(scan);//查找激光数据最大值
std::cout<<"激光最大数据:"<<"指数:"<<max.index<<"范围:"<<max.range<<"强度:"<<max.intensity <<"x轴:"<<max.x <<"y轴:"<<max.y <<std::endl;
}
}查找最大值函数将获取的激光数据遍历,查找激光强度最大的点,并将该点数据返回
//查找最大值
Point findMax(const sensor_msgs::LaserScan &scan) {
Point max{};
for (long i = 0; i < scan.ranges.size(); i++) { //遍历数据
double intensity = scan.intensities[i];
if (intensity > max.intensity) { //排序 找激光强度最大的点
max.index = i;
max.range = scan.ranges[i];
max.intensity = intensity;
max.x = max.range * cos(scan.angle_min + scan.angle_increment * max.index);
max.y = max.range * sin(scan.angle_min + scan.angle_increment * max.index);
}
}
return max;
}基本代码编写完毕,开始测试
(三)准备测试
在core的launch文件夹中新建trilateration.launch文件,用于启动该节点,现在分开写有利于后面往里添加参数
<launch>
<node pkg="trilateration" type="trilateration" name="trilateration" output="screen/">
</launch>再新建一个launch文件用于集成激光,三边定位,rviz的启动节点
<launch>
<!--激光雷达-->
<include file="$(find core)/launch/config/laser.launch"/>
<!--三边定位-->
<include file="$(find core)/launch/config/trilateration.launch"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find core)/config/rviz/rviz.rviz"/>
</launch>在工作空间目录下新建start.sh脚本文件用于快速启动测试
#!/bin/bash
source ./devel/setup.sh
roslaunch core view_laser.launch(四)运行效果
编译通过后在工作空间下打开终端,运行脚本文件后即可看见结果
(五)问题和下一目标
问题:同一时间只能找出一个点,不适用于三边定位需要找出多个反光柱的任务
目标:将激光信息分区域,一个区域即位一个反光柱,再找出个反光柱的反光最强点
















 4055
4055











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









