





相机模型
数学描述
物理坐标系到像素坐标系
相机坐标系到物理坐标系
世界坐标系到相机坐标系
世界坐标系到像素坐标系
小结
应用-计算点云
相机模型
如图所示,f表示相机的焦距,Z表示物体距离,X表示物体的大小,x表示像的大小。根据相似三角形原理,有
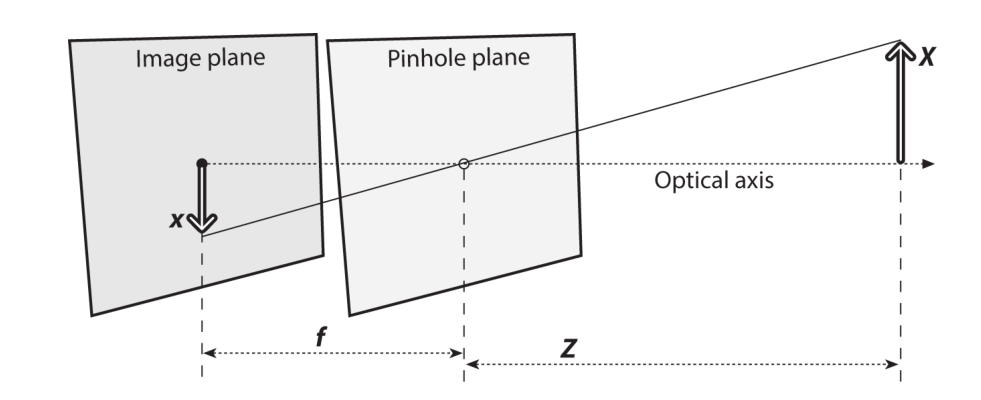
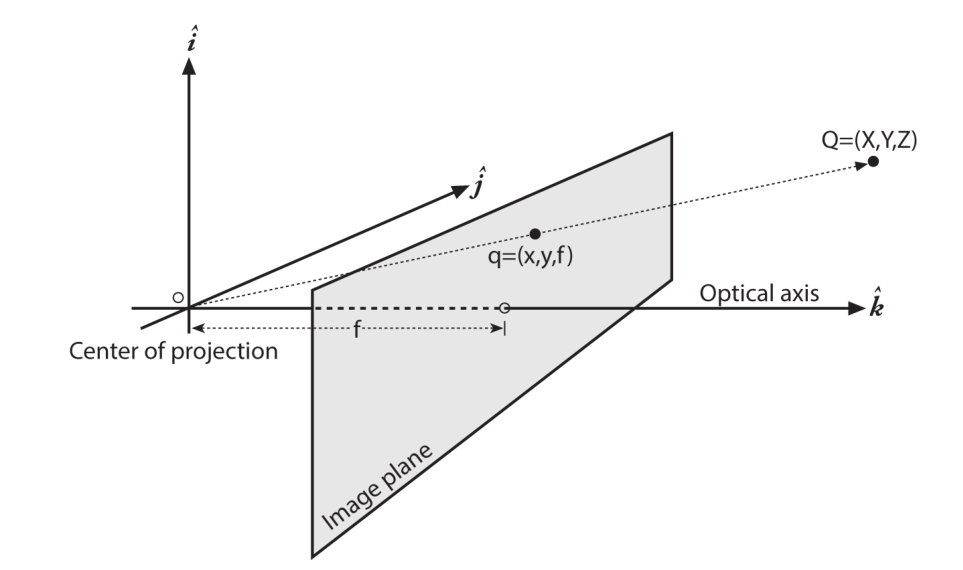
为了更方便分析,对Figure 1作等价调整,如图所示。同理,根据三角形相似原理,有:
数学描述
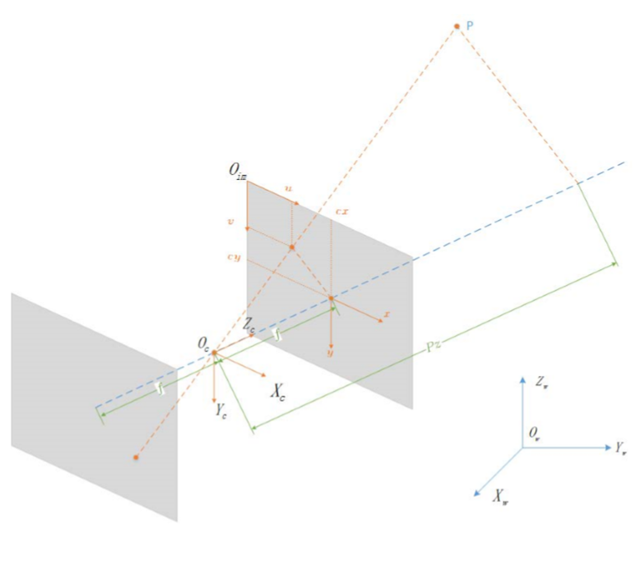
世界坐标系(world coordinate system): 以被测物上的点作为参考,定义的绝对坐标系,坐标记为.
相机坐标系(camera coordinate sysytem): 以相机光心为坐标原点,主光轴为z轴,x轴和y轴分别平行于CCD平面的两条垂直边,坐标记为.
物理坐标系(phyisical coordinate sysytem): 以主光轴与CCD的交点为原点,x轴和y轴分别平行于CCD平面的两条垂直边,记为.
像素坐标系(pixel coordinate system): 以CCD左上角顶点为原点,x轴和y轴都平行于图像坐标系,以像素为单位,坐标记为.
物理坐标系到像素坐标系
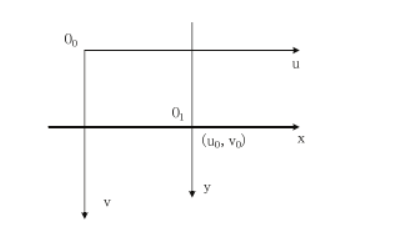 设是物理坐标系原点在像素坐标系中的坐标,dx和dy分别是每个像素在图像平面的x和y方向上的物理尺寸。
设是物理坐标系原点在像素坐标系中的坐标,dx和dy分别是每个像素在图像平面的x和y方向上的物理尺寸。
用齐次坐标表示为:
相机坐标系到物理坐标系
由三角形相似原理,有:
用齐次坐标表示为:
世界坐标系到相机坐标系
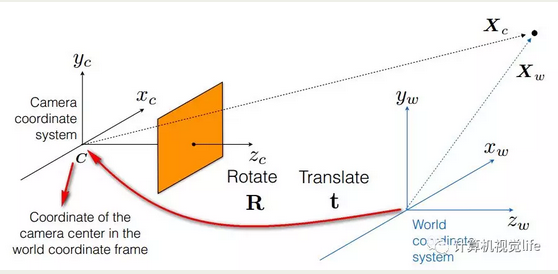
其中R为3x3的正交旋转矩阵,t为3x1的平移向量。
世界坐标系到像素坐标系
结合式(1),(2),(3)可得:
其中K为相机的内参矩阵,M为相机的外参矩阵。相机标定即确定相机的内参和外参。
小结
- 外参矩阵将世界坐标系和相机坐标系关联:
即.
- 内参矩阵将相机坐标系和像素坐标系关联:
内参矩阵
通常记为以像素为单位的 如果不考虑CCD像素在x和y方向上的尺寸差异,则简化为 , dp为单个像素的尺寸。应用-计算点云
根据相机成像模型:
设物体的距离为,则
求解,得















 3915
3915











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









