






本篇文章是 小明工坊:【ROS-Gazebo】平衡与舞蹈-pigot四足机器人姿态控制仿真 的理论基础,并部分加以完善。
理解本文所需要掌握的基础知识为:
- 姿态的欧拉角表示方法
- 变换矩阵的含义与使用
概述
四足机器人运动过程中,身体部分的姿态会不断地发生变化。假如机器人的足端一直保持与地面接触且相对位置不发生变化,此时的身体姿态我们称之为站立姿态。
四足机器人的站立姿态控制,本质上是并联机器人的逆解。只不过相比于并联机器人每条支腿只有一个驱动自由度、平台自由度和驱动自由度一般相等而言,四足机器人存在许多冗余自由度。因此在解算出每条腿的位置向量后,还需要对每条腿做逆解(而不是像并联机器人那样直接得到线位移)。在这里我们默认单腿的逆解已知。
身体位姿(位置和姿态)的表示
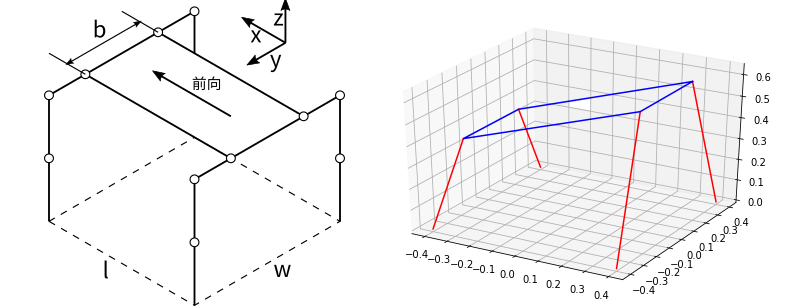
pigot四足机器人结构简图如图1所示。
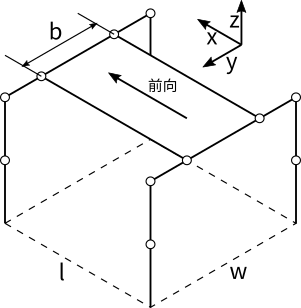
其中,结构参数</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 271
271











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









