







自Apollo开发者社区小程序上线以来,我们每一天都会在「社区问答」版块收到许多开发者的技术提问。
每周,可爱的Apollo小姐姐都会精选出被采纳的社区问答进行整理汇总,并统一对大家进行答复。
让我们一起看看本周的精选问答吧~~若你有更好的回答或建议,欢迎留言或加入开发者交流社群一起讨论分享!各位技术大牛也可以到小程序回答问题获得相应积分,参加社区布道师评选。
ENJOY THE FOLLOWING

Apollo 5.5如何将三个16线的lidar数据融合,已经改好了velodyne.dag文件,还需要在哪里标定参数?
A:在static_transform_conf.pb.txt里添加标定参数文件路径,还有lidar fusion的配置文件里添加新加激光雷达点云的channel。

已知笛卡尔坐标系下目标点坐标和参考线的三次方程,怎么求目标点在参考线下的Frenet坐标值呢?
A:Referenceline类有xytosl的坐标系转换函数,但是要把参考线三次方程转化为referenceline类。

按教程完成了循迹路线录制,也能在Dreamview中清晰的看到蓝色路线。但是点击start auto车辆不动,是什么原因呢?
A:点击start auto后Dreamview会发出control/pad话题,一个start指令给到控制模块,控制模块把pad消息转发给Canbus,最后Canbus将状态机切换到自动模式,检查看看这个链路哪里有问题。

echo "export APOLLO_ROOT_DIR=$(pwd)" >> ~/.bashrc && source ~/.bashrc执行此条指令后,都会报图片中的错误,每次打开终端都会显示此报警。
A:建议直接把这一行 export APOLLO_ROOT_DIR=/home/yang/apollo 手写进去。
在Dreamview中可以搭建自己想要的场景吗?可以添加其他车辆吗?除了内置地图,我们可不可以自己编辑车道信息?
A:可以自己diy地图的,按照地图proto格式组织好数据就行,添加其他车辆可以写一个python脚本发布感知的数据,当然更好的方式是用LGSVL模拟器。
三个16线激光雷达如何在本地做标定融合?
A:Github上有开源的多雷达标定算法比如ndt。Apollo 3.0也release过一个多雷达标定工具,不过只能在3.0用。

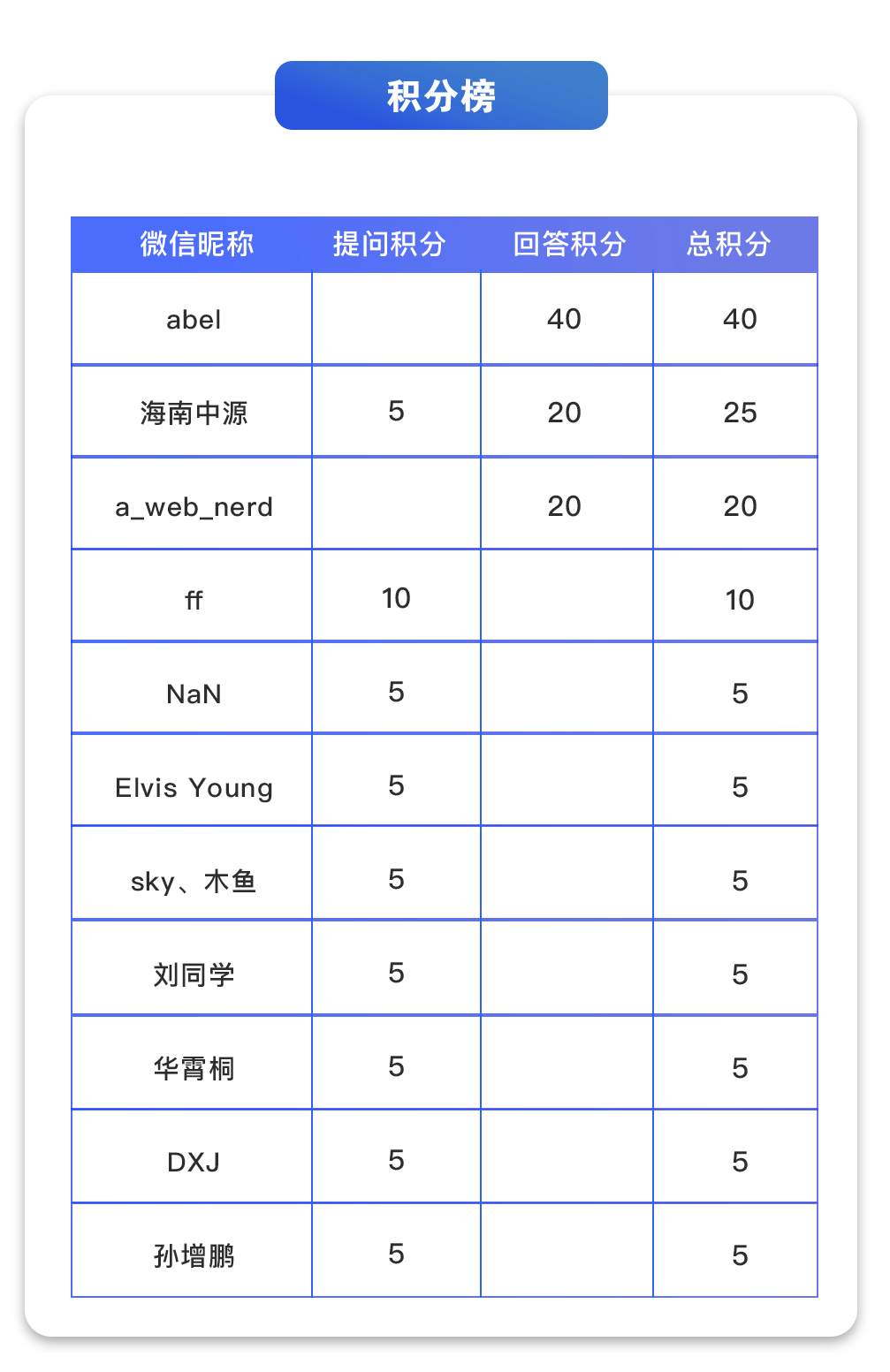
自社区推出问答积分赛活动以来,Apollo小哥哥每天在社区交流群中分享开发者的提问,并收到了很多热心的解答,大家互帮互助的精神非常赞!
为了奖励为社区作出贡献的开发者,Apollo小哥哥每周将选出积分榜第一名,送出Apollo定制周边一份~
本周积分榜前10名新鲜出炉,快看看自己有没有上榜吧,第一名记得找小哥哥领奖哦~
各位技术大牛也可以进入小程序回答问题获得相应积分,参加社区布道师评选,为开发者答疑解惑,更有机会获得小灶辅导~
报名可戳:社区布道师参与评选。

























 3608
3608











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









