







传感器设备的标定

1:单目标定
单目标定opencv不稳定,matlab更好
Ubuntu下matlab安装方法
https://blog.csdn.net/m0_38087936/article/details/103342731
ImageSize:图像大小
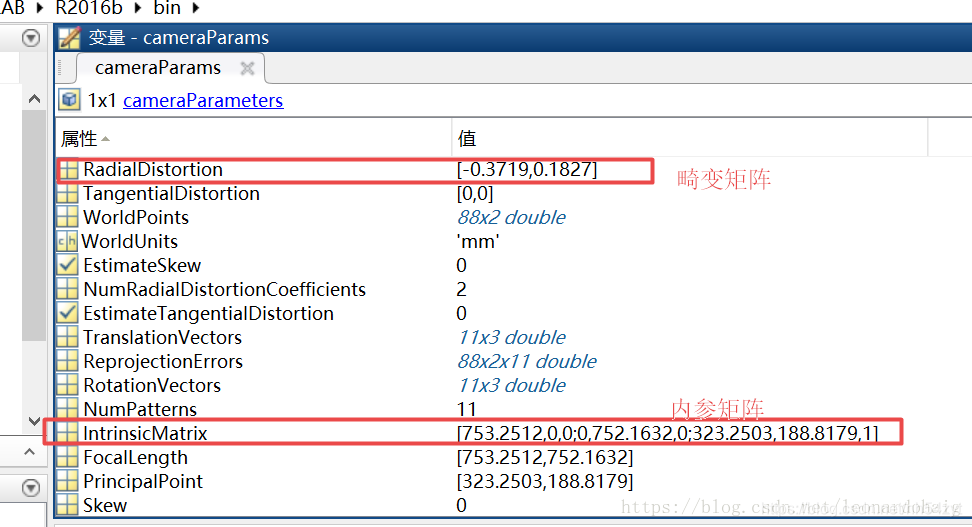
Radial Distortion:径向畸变
Tangential Distortion:切向畸变
World Points:世界坐标系下的点
World Units:世界坐标下的单位
Estimate Skew:估计倾斜
Num Radial Distortion Coefficient:径向畸变系数个数
Estimate Tangential Distortion:估计切向畸变
Translation Vectors:平移向量
Reprojection Errors: 重投影误差
Detected Keypoints:检测到的关键点
Rotation Vectors:旋转向量
Num Patterns:模态数
Intrinsics:内参
Intrinsic Matrix:内参矩阵
Focal Length:焦距
Principal Point:主点偏移
Skew:偏斜
Mean Reprojection Error:平均重投影误差
Reprojected Points:重投影点
Rotation Matrices:旋转矩阵
————————————————
注意参数:
这里对matlab得到的结果进行一个简要的说明:
Matlab中
RadialDistortion 是k1 k2 k3,
TangentialDistortion是p1 p2
内参矩阵:
ans =
955.8925(fx) 0 0
0 955.4439(fy) 0
296.9006(cx) 215.9074(cy) 1.0000
Opencv中
内参矩阵:
ans =
955.8925(fx) 0 296.9006(cx)
0 955.4439(fy) 215.9074(cy)
0 0 1.0000
畸变矩阵:
{k1 k2 p1 p2 k3 }
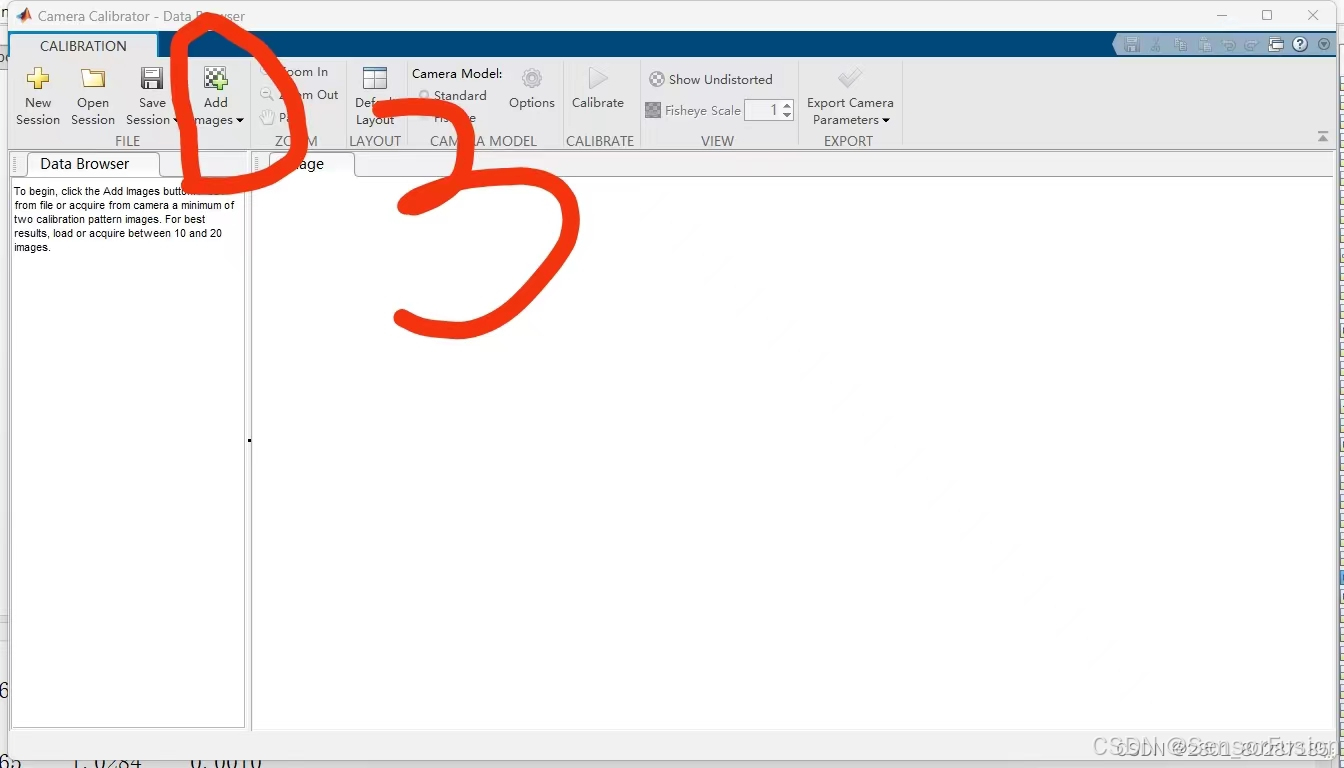
第一步;
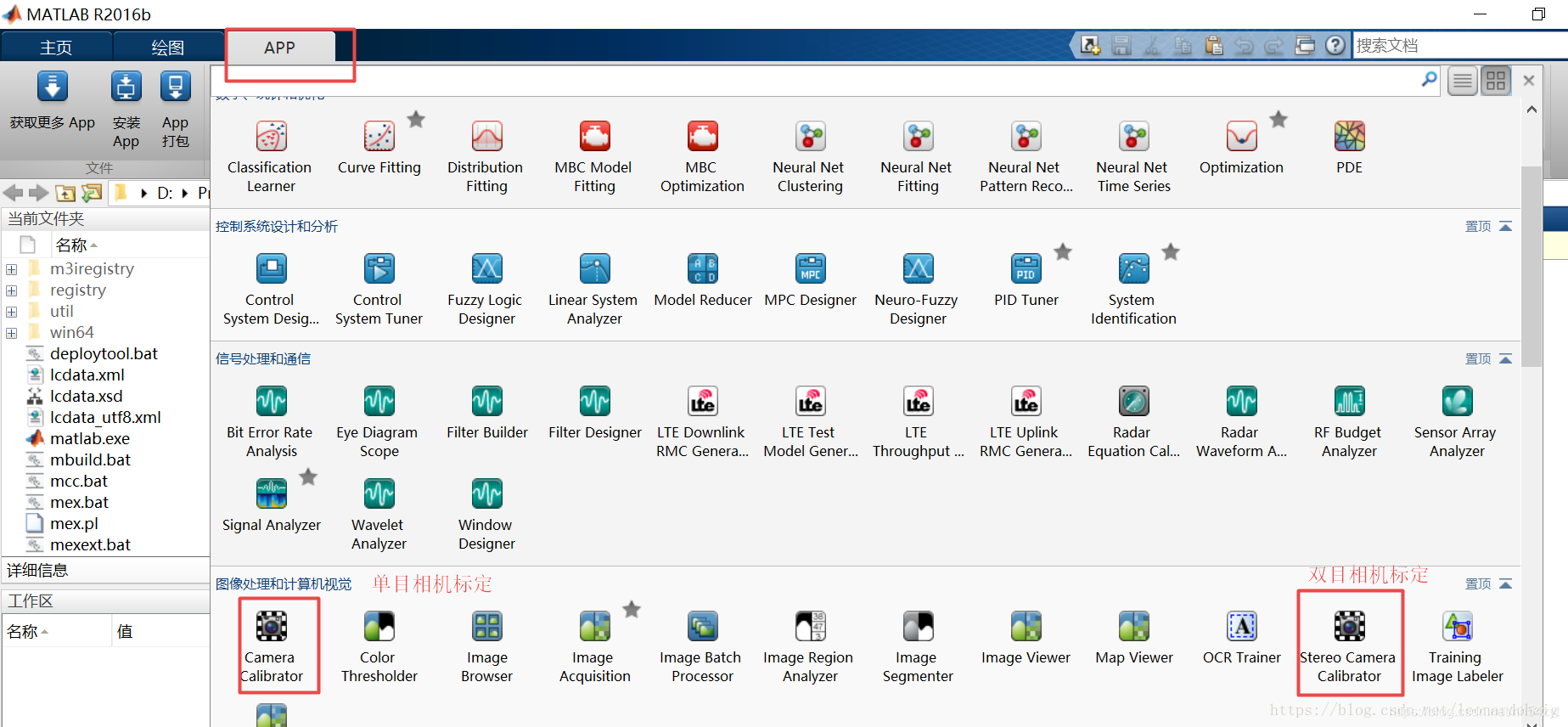
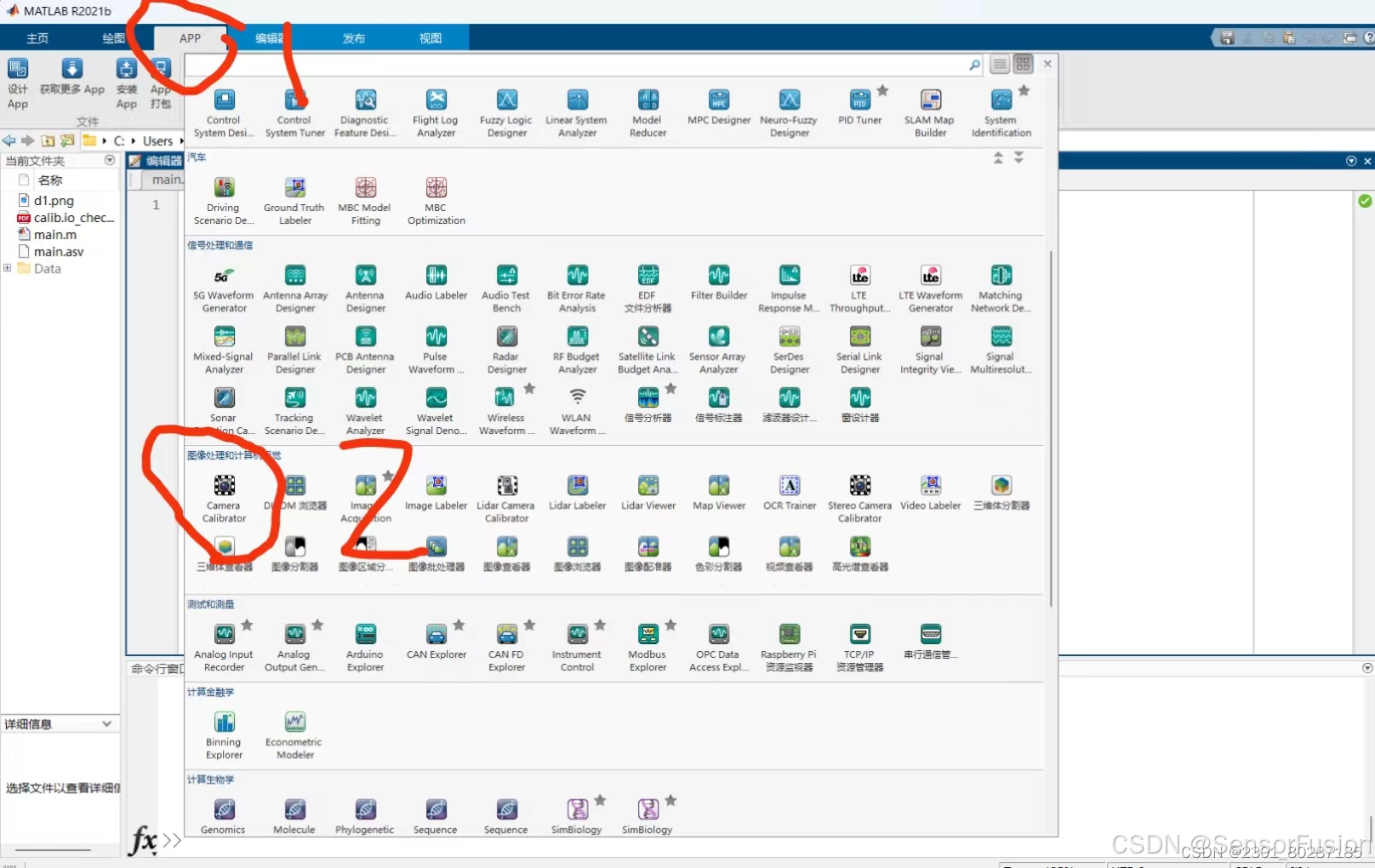
点击先点击matlab中的APP(1),接着找到app右侧下三角,在图像处理中找到camera(2)进入标定工具箱
第二步
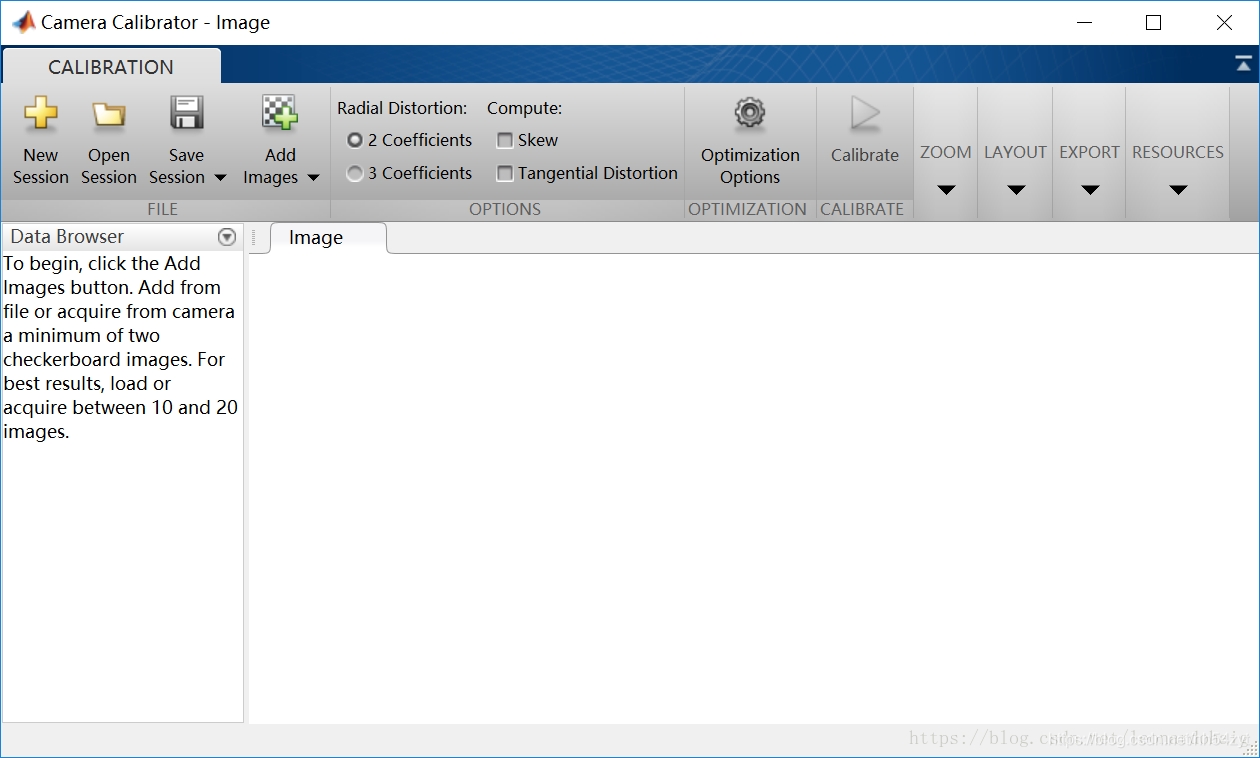
点击Add(3),导入准备好的棋盘图片
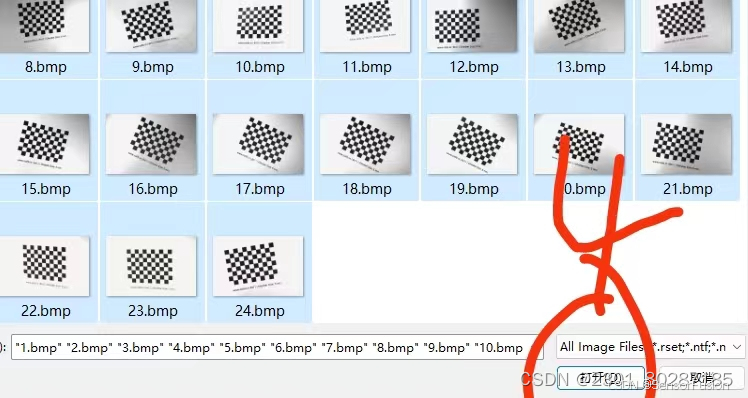
第三步,
全选图片后点击打开(4),导入图片
**
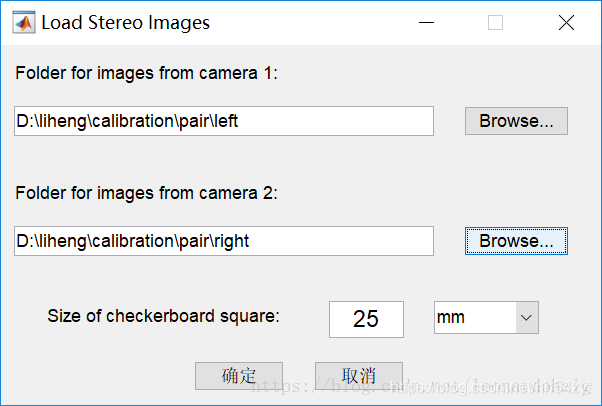
第四步,
选择棋盘格大小(5)(单位mm)后点击确定
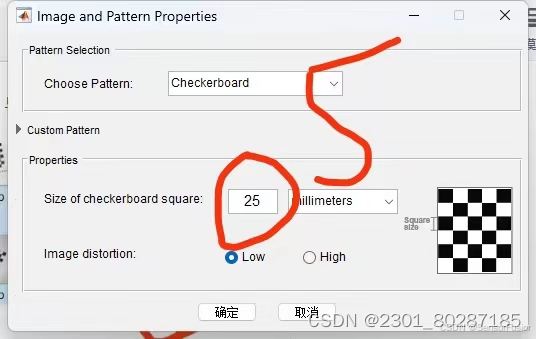
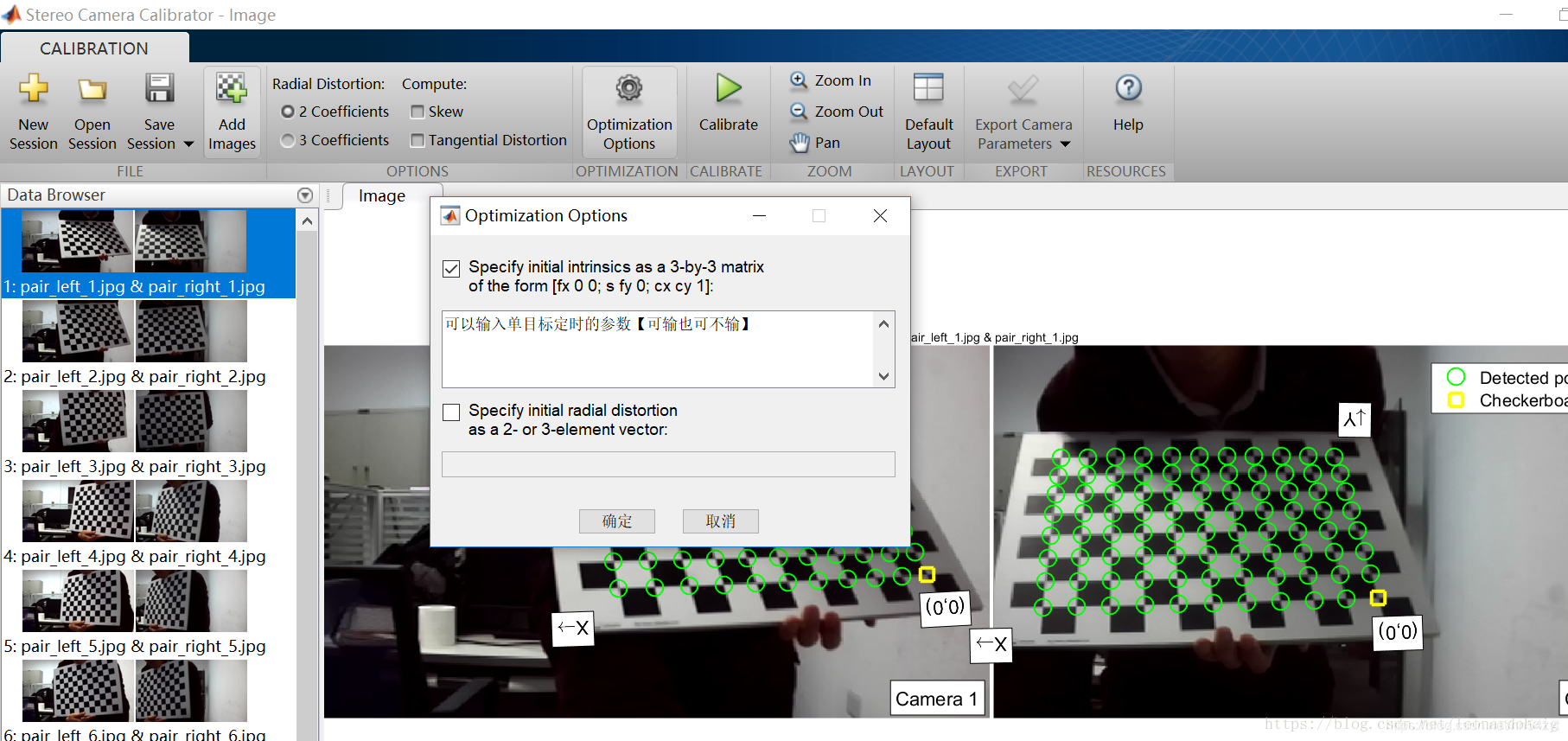
第五步,
选择相机型号,普通相机鱼眼相机畸变参数优化类型

其他:
在使用opencv中的undistort进行畸变矫正时,需要使用8个参数即fc1, fc2, cc1, cc2, kc1, kc2, kc3, kc4;
RadialDistorion中的参数分别是:kc1,kc2,kc5(不常用)
TangentialDistortion中的参数分别是:kc3,kc4
IntrinsicMatrix中的参数分别是:
fc1 不用 0
不用 fc2 0
cc1 cc2 1
opencv的畸变矫正程序如下:
double fc1, fc2, cc1, cc2, kc1, kc2, kc3, kc4;
fc1 = ;
fc2 = ;
cc1 = ;
cc2 = ;
kc1 = ;
kc2 = ;
kc3 =;
kc4 =;
Mat intrinsic_matrix = (Mat_(3, 3) << fc1, 0, cc1, 0, fc2, cc2, 0, 0, 1);
Mat distortion_coeffs = (Mat_(1, 4) << kc1, kc2, kc3, kc4);
2:双目标定
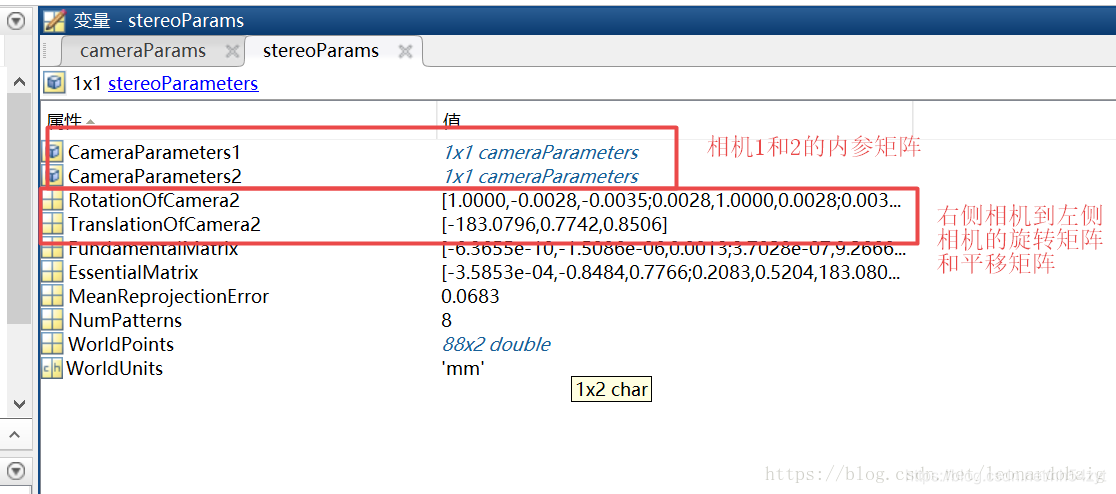
经过双目标定得到摄像头的各项参数后,
采用OpenCV中的stereoRectify(立体校正)得到校正旋转矩阵R、投影矩阵P、重投影矩阵Q,
再采用initUndistortRectifyMap函数得出校准映射参数,然后用remap来校准输入的左右图像。
双目标定参考文档(英文):https://ww2.mathworks.cn/help/vision/ug/stereo-camera-calibrator-app.html
3:单目与Radar毫米波标定
方法一:
方法一:以图像坐标系为准,根据投影点图像像素坐标和前方车辆的宽度、距离信息在 图像上建立感兴趣区域ROI。
方法二:以毫米波雷达坐标系为准,将摄像头坐标系进行旋转和平移,并与毫米波雷达坐标系对齐。对摄像头的原始图像进行逆透视变换时,选取的地面特征点均以毫米波雷达为原点,并测量其在世界坐标系(毫米波雷达坐标系)下的坐标。
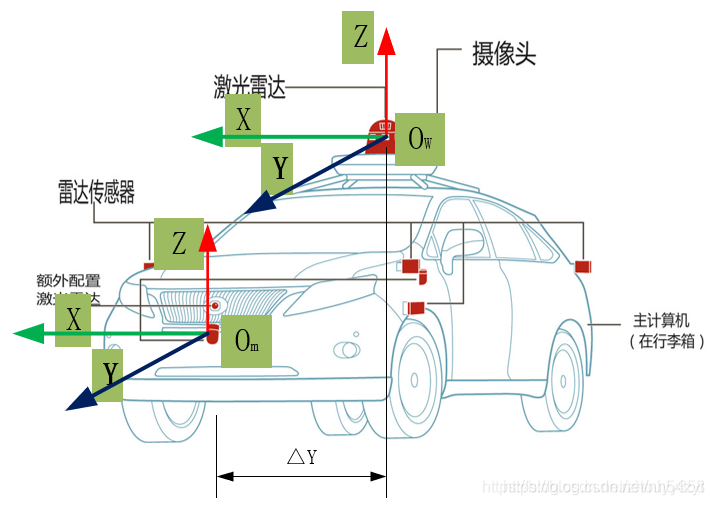
方法二:
https://blog.csdn.net/leonardohaig/article/details/88724365
方法三:
方法四:



水平摆放https://blog.csdn.net/weixin_42631693/article/details/90042530
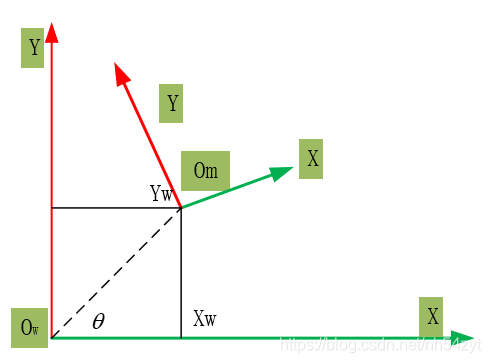
倾斜摆放
Radar坐标系俯仰角和偏航角到世界坐标系转换
Radar
4:Lidar与Radar标定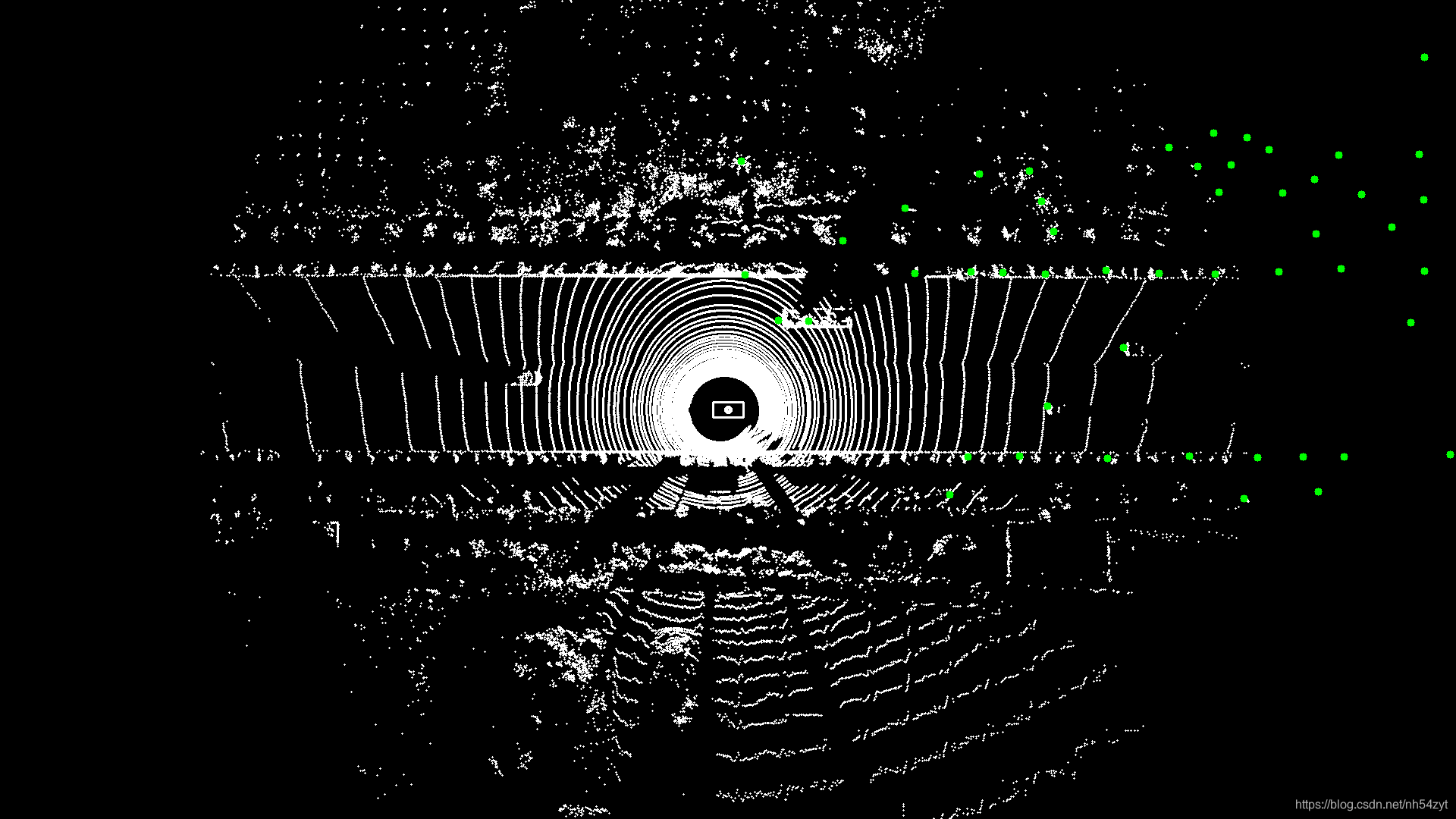
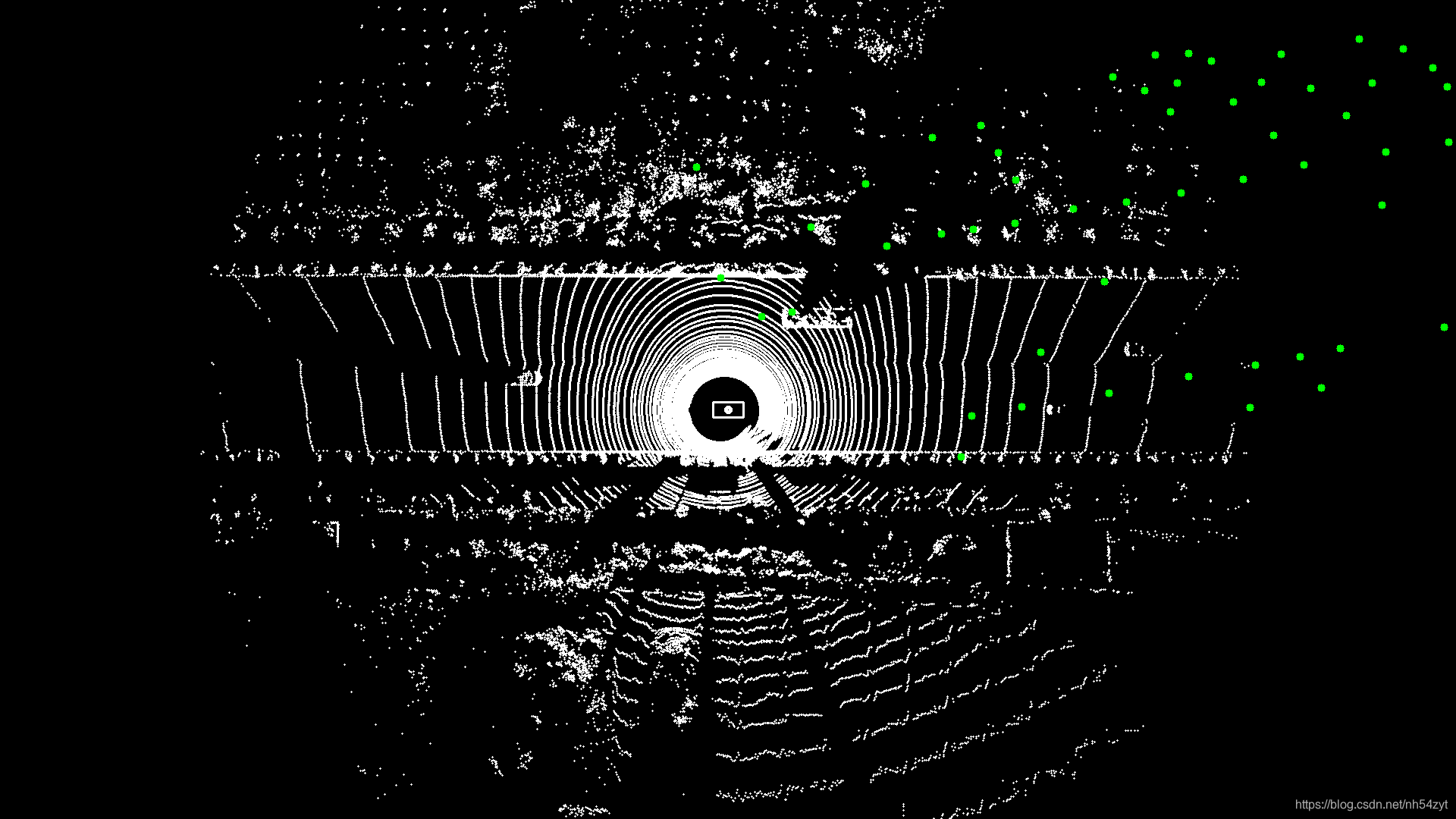
radar lidar camera分别检测跟踪,融合跟踪
radar_lidar
5:Lidar与Camera标定
什么是相机与激光雷达外参标定?
就是相机坐标系和激光雷达坐标系的TF变化。位置x,y,z 欧拉角 roll,pitch,yaw,6个变量构成一个4*4的旋转变换矩阵
标定的就是这个4维的旋转矩阵。
标定的方法有:
基于特征
基于运动观测
基于最大化互信息
基于深度学习
基于特征 的方法是根据对应特征点求解PnP问题,需要标定板来获取特征
基于运动观测可以看作手眼标定问题,精度决定于相机和雷达的运动估计
基于最大化互信息认为图像灰度于反射强度具有相关性
基于深度学习需要长时间的训练并且泛化能力不高
定方法有两个指标:
精度
自动化程度
内参 外参联合优化标定

https://github.com/OpenCalib/JointCalib
camera标定
https://github.com/enazoe/camera_calibration_cpp.git
开源标定算法
https://github.com/PJLab-ADG/SensorsCalibration.git
三维点云转到二维
原理为下图

如果考虑,z =0 ,即张正友求解法,标定板为一个平面建立坐标,原理如下:


那么内参和外参可以合并进行简化为H单应性矩阵,
那么如果已知内参和外参,可以将图像投影到三维空间,前提是三维空间同一个平面,
公式类似于上面
void CameraMapRail::Implement::MapImageToRail(std::vector<cv::Point2f> in,
std::vector<cv::Point2f>& out) {
int n = 0;
bool flag = in.size() == out.size() ? true : false;
for (auto i : in) {
float x = (u_params[0] * i.x + u_params[1] * i.y + u_params[2]) /
(u_params[3] * i.x + u_params[4] * i.y + u_params[5]);
float y = (v_params[0] * i.x + v_params[1] * i.y + v_params[2]) /
(v_params[3] * i.x + v_params[4] * i.y + v_params[5]);
if (flag)
out[n] = cv::Point2f(y, x);
else
out.emplace_back(cv::Point2f(y, x));
n++;
}
}
// 其中 u_params 可以通过内参外参推导出 H11 H12的数值
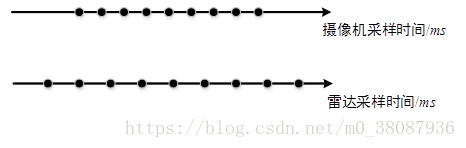
6:同步
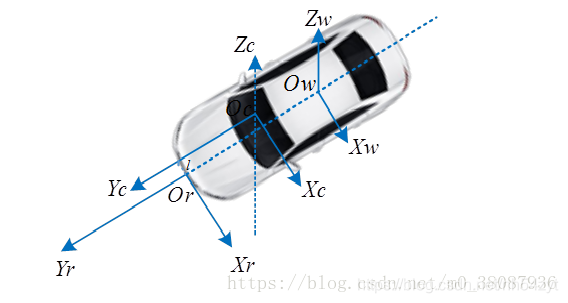

7:ADAS radar和camera

可以简单的将车作为中间变量
即求Radar到Car,Camera到Car
那么Radar到Car:

那么Car到camera:
方法:
利用世界坐标系中的一系列的已知的点相对车体坐标系的三维点
及YXZ三维坐标(距离Car圆心)

整体的公式如下:
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
方法

7: PNP
如下5种PNP求解方法:
https://www.cnblogs.com/yepeichu/p/12670818.html

例如求激光和图像标定外参
https://blog.csdn.net/nh54zyt/article/details/112134514
https://blog.csdn.net/qq_37394634/article/details/104430656
直接法:




例如,如下代码:
先使用OpenCV的solvePnP()求解出运动,
然后再使用高斯牛顿法进行BA优化。
#include<iostream>
#include "common.h"
#include <Eigen/Core>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/solvers/csparse/linear_solver_csparse.h>
#include <g2o/types/sba/types_six_dof_expmap.h>
// BA求解
void bundleAdjustment(vector<Point3f> points_3d, vector<Point2f> points_2d, const Mat &K, Mat &R, Mat &t);
/**
* 本程序演示了PnP求解相机位姿,BA优化位姿与3D空间点坐标
* @param argc
* @param argv
* @return
*/
int main(int argc, char **argv) {
if (argc != 4) {
cout << "usage: pose_estimation_3d2d img1 img2 depth1" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
vector<KeyPoint> key_points_1, key_points_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, key_points_1, key_points_2, matches);
cout << "一共找到" << matches.size() << "组匹配点" << endl;
// 建立3D点,深度图为16位无符号,单通道
Mat d1 = imread(argv[3], CV_LOAD_IMAGE_UNCHANGED);
Mat_<double> K(3, 3);
K << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1;
vector<Point3f> pts_3d;
vector<Point2f> pts_2d;
for (auto &match : matches) {
ushort d = d1.ptr<unsigned short>(int(key_points_1[match.queryIdx].pt.y))
[int(key_points_1[match.queryIdx].pt.x)];
if (d == 0)
continue;
double dd = d / 1000.0;
Point2d p1 = pixel2cam(key_points_1[match.queryIdx].pt, K);
pts_3d.push_back(Point3d(p1.x * dd, p1.y * dd, dd));
pts_2d.push_back(key_points_2[match.trainIdx].pt);
}
cout << "3d-2d pairs: " << pts_3d.size() << endl;
Mat r, t;
// 调用OpenCV的PnP求解
solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false, cv::SOLVEPNP_EPNP);
Mat R;
// 通过罗德里格斯公式将旋转向量转为旋转矩阵
cv::Rodrigues(r, R);
cout << "R=\n" << R << endl;
cout << "t=\n" << t << endl;
// BA
bundleAdjustment(pts_3d, pts_2d, K, R, t);
return 0;
}
/**
* BA求解
* @param points_3d
* @param points_2d
* @param K
* @param R
* @param t
*/
void bundleAdjustment(vector<Point3f> points_3d, vector<Point2f> points_2d,
const Mat &K, Mat &R, Mat &t) {
// 初始化g2o,pose维度为6,landmark维度为3
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> Block;
Block::LinearSolverType *linearSolver = new g2o::LinearSolverCSparse<Block::PoseMatrixType>();
auto *solver_ptr = new Block(linearSolver);
auto *solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
// vertex
auto *pose = new g2o::VertexSE3Expmap();
Eigen::Matrix3d R_mat;
R_mat << R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2),
R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2),
R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2);
pose->setId(0);
pose->setEstimate(g2o::SE3Quat(R_mat, Eigen::Vector3d(t.at<double>(0, 0), t.at<double>(1, 0), t.at<double>(2, 0))));
optimizer.addVertex(pose);
// landmarks
int index = 1;
for (const Point3f &p:points_3d) {
auto *point = new g2o::VertexSBAPointXYZ();
point->setId(index++);
point->setEstimate(Eigen::Vector3d(p.x, p.y, p.z));
point->setMarginalized(true);
optimizer.addVertex(point);
}
// parameter: camera intrinsics
g2o::CameraParameters *camera = new g2o::CameraParameters(
K.at<double>(0, 0), Eigen::Vector2d(K.at<double>(0, 2), K.at<double>(1, 2)), 0);
camera->setId(0);
optimizer.addParameter(camera);
// edges
index = 1;
for (const Point2f &p:points_2d) {
auto *edge = new g2o::EdgeProjectXYZ2UV();
edge->setId(index);
edge->setVertex(0, dynamic_cast<g2o::VertexSBAPointXYZ *>(optimizer.vertex(index)));
edge->setVertex(1, pose);
edge->setMeasurement(Eigen::Vector2d(p.x, p.y));
edge->setParameterId(0, 0);
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
auto t1 = chrono::steady_clock::now();
optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(100);
auto t2 = chrono::steady_clock::now();
auto time_used = chrono::duration_cast<chrono::duration<double >>(t2 - t1);
cout << "optimization costs time: " << time_used.count() << " seconds." << endl;
cout << "\nafter optimization:\n" << "T=\n" << Eigen::Isometry3d(pose->estimate()).matrix() << endl;
}

















 285
285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









