






前些日子,知乎上有知友问“现在工业机器人里面到底有没有基于动力学控制”。我的回答是这样子的:
”机器人控制开发早已实现基于动力学模型的控制,否则打不开那么多的应用场景。举个例子: 短距离快速运动的点焊运动, 没有基于机器人机械动力学模型的话,这种运动会激励机械振动,只有基于动力学模型的控制才可以克服。另外像精准激光切割, 涂胶和去毛刺等应用场景,精准的contour tracking很重要,如果没有基于模型的控制,无法达成高跟随精度。还有,现在工业机器人具有末端负载自动识别功能,你说如果没有用到动力学模型,能实现吗?”
今天想总结和分享一下动力学模型在机器人开发和机器人控制和机器人参数监控中的角色:
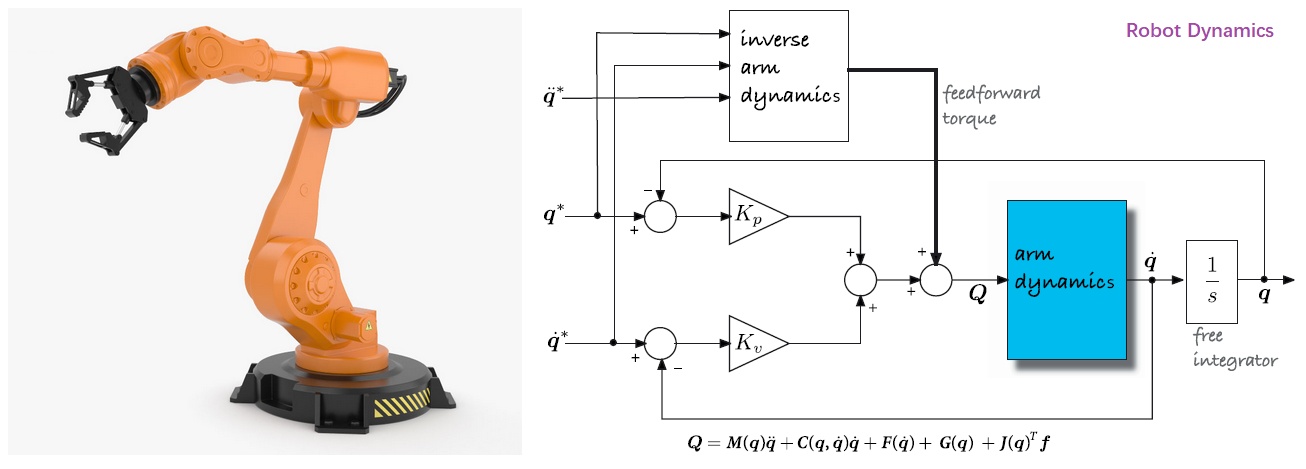
1)计算控制环前馈信号和优化关节参考信号
帮助计算机器人控制环前馈信号和优化关节参考信号,优化机器人在应用任务要求和动力学约束下的速度,加速度和加速度率的参考信号。机器人末端装上不同的工具完成不同应用任务,一般情况(除了PTP)都是在机器人笛卡尔坐标系下规划工具的运动轨迹,然后通过运动学关系投射到机器人关节空间,生成关节空间的运动轨迹,因为毕竟最终机器人运动是靠驱动关节上的电机的。这些量驱动电机,间接使得末端工具按照预定轨迹运动。然而由于从机器人末端工具到关机电机输出轴之间耦合了弹性连杆,弹性轴承,摩擦和其他非线性要素如迟滞,使得最终任务空间的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









