







这里备份一下,全文在github上
TurtleZhong/Map-based-Visual-Localizationgithub.com
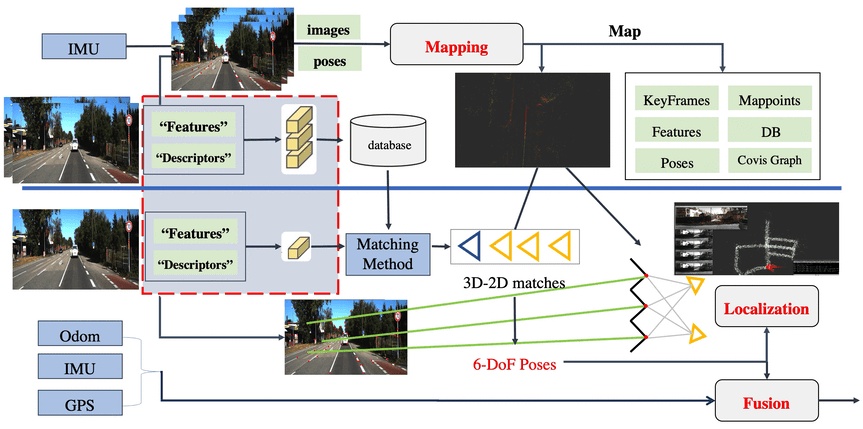
基于地图的视觉定位
基于已知地图的视觉定位是一个比较大的问题,基本上会涉及到slam系统,重定位,图像检索,特征点提取及匹配,多传感器融合领域。
0.写在前面
作者: https://github.com/TurtleZhong
在写本文之前,我想先简单的总结一下历年用的比较多的slam系统,另外会提出一些开放性的思考问题,这些思考性的问题我也会提供一个简单粗暴的替代办法或者思路,然后后面讲这个项目可以解决的一些问题以及后面还要探究的问题,原则上来讲,本文:
a)应该不会放出太多的代码[当然看心情],但会整理一些这个项目参考过的有意思的项目以及一些教学性代码小样;
b)不会涉及到太多公式细节,尽量写成白话文,且大多数东西都能在github上找到或者进行魔改
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1765
1765











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









