







基于双目视觉的测距、三维重建等过程中的第一步就是要进行标定。双目相机的标定过程在网上有很多资料,但是基本都没有matlab官方网址讲的好。所以请参考MATLAB官方文档:https://ww2.mathworks.cn/help/vision/ug/stereo-camera-calibrator-app.html,这里面讲得已经相当详细了!
下面整理一下要点:
一、拍摄棋盘格
为获得最佳效果,请使用至少10到20张包含校准图案的图像。 校准器至少需要三个图像。 尽量使用未压缩或压缩损失很小的图像格式(如png或bmp)。 为了更高的校准精度你需要:
获取一部分你所关注的距离处的棋盘格图片,比如你要测量2米远的物体,那么请将棋盘放在距离相机2米左右的地方拍摄一部分图片
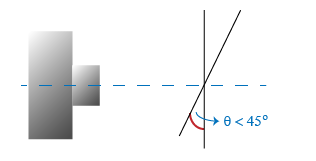
棋盘表面和相机成像平面的夹角必须小于45度
不要修改图像,比如对其进行剪切
不要使用自动聚焦模式或改变图像的放大倍率
以相对于相机的不同方向拍摄棋盘图像
尽量采集各种不同的棋盘图像。镜头的畸变从图像中心径向增加,并且有时在图像各帧上表现不均匀, 为了获取图像的畸变信息,棋盘应当处在图像的各种不同边缘处
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1440
1440











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









