





这是一篇学习笔记,轻拍。
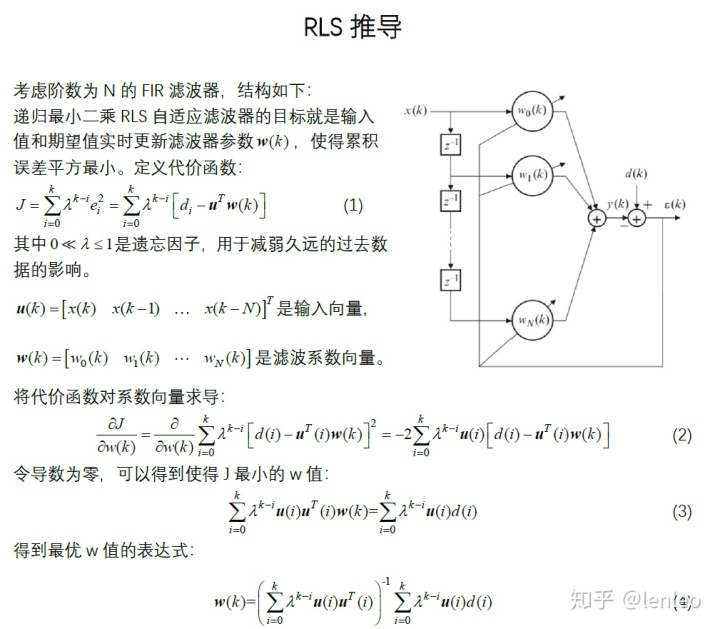
最小二乘法的结论是,
根据上式,每一次更新参数估计的时候,都需要对之前的N个数据进行运算,在数据量较大时计算复杂。新的问题就是,能否寻找递推关系,在估计当前参数值的时候利用上一次估计的结果,然后做累加更新,这就是RLS要解决的问题。
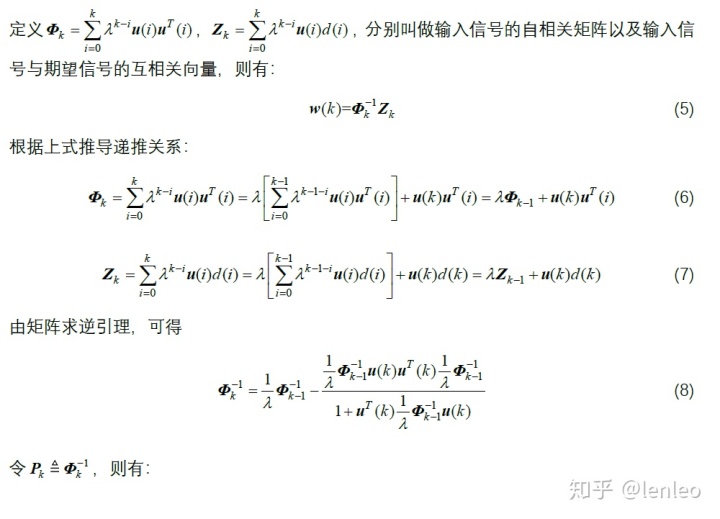
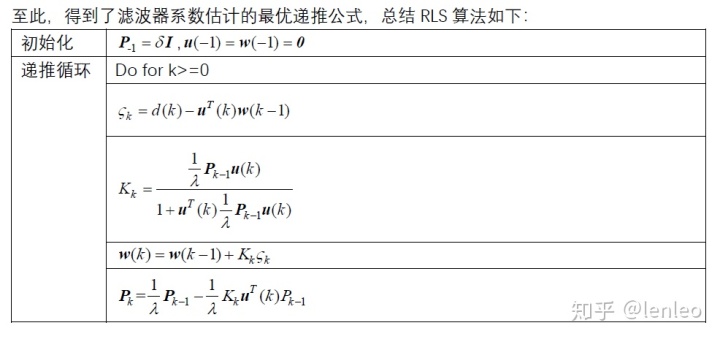
1. 推导过程
需用到矩阵求逆引理,即:


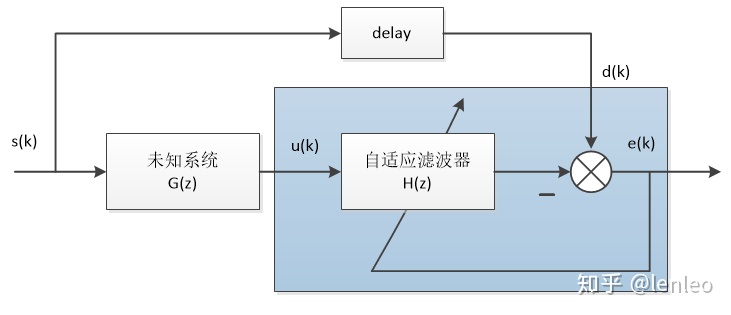
2. 用RLS进行系统辨识
使用RLS自适应滤波器进行系统辨识,可以有两种方法。一是并联方法,创建一个等效系统来估计未知系统的行为。
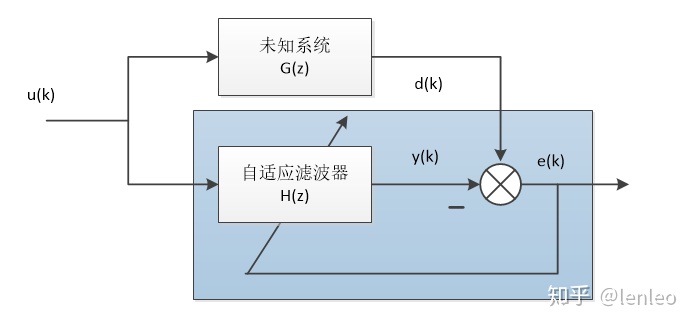
另外一种方法是将自适应滤波器与未知系统级联会使自适应滤波器收敛到与未知系统相反的解,即G(z)×H(z)=1。
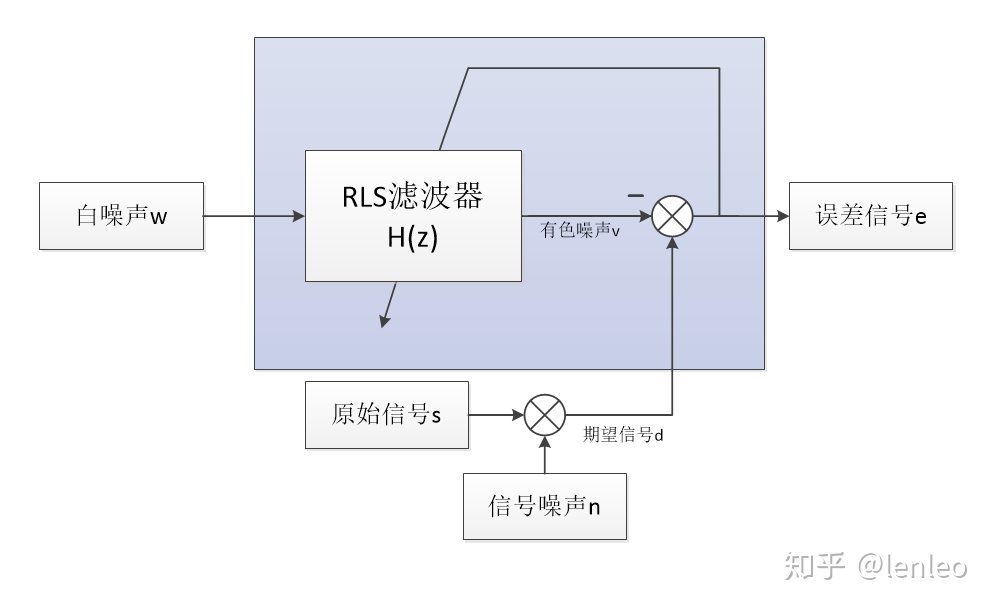
3. 用RLS过滤信号中的噪声
使用RLS过滤真实信号中的有色噪声,整个系统工作原理示意图如下:
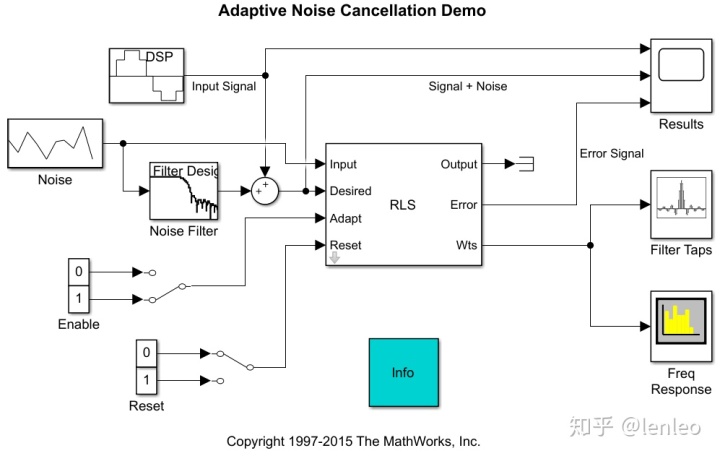
例如matlab提供的demo,命令行输入rlsdemo即可打开。实际上用于自适应滤波器的输入信号只需要与信号中携带的噪声信号相关即可。
参考资料:
【1】Haykin, Simon,Adaptive Filter Theory. Upper Saddle River, NJ: Prentice-Hall, Inc., 1996.
【2】ECSE-4530 Digital Signal Processing.Rich Radke, Rensselaer Polytechnic Institute
【3】https://ww2.mathworks.cn/help/dsp/ug/adaptive-noise-cancellation-using-rls-adaptive-filtering.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









