







PartI : 开篇语
继九九度过一个为期两天的假日(宅宿舍)之后,终得时间来补一下视觉感知的无人机动态避障的下篇。本篇将在上篇机器视觉技术概念的基础上对无人机的动态避障问题描述和具体的技术流程进行展开,最后进行总结和展望。

PartII : 动态避障问题描述
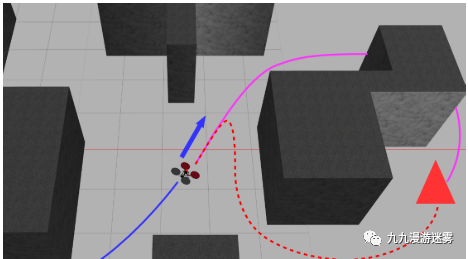
无人机动态避障的主要目的在于让无人机实时感知周围障碍物的位置和速度(世界位置和速度),且障碍物速度不为零。相比静态避障的核心区别在于,无人机需要实时对障碍物位置进行预测,提前产生控制量,从而躲避障碍物。
静态障碍物
障碍物位置和形状无法改变;
障碍物易于被探测。
动态障碍物
位置和特性处于变化之中;
难以在较短时间做出反应。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4024
4024











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









