





本文是我在《泡泡机器人》上翻译的一篇文章,放在这里做个备份。
原文链接:RS-CNN:基于几何关系的点云分析卷积网络
一、前言
由于点云的无序性,点云分析一直是一个比较有挑战性的问题。在本篇文章中,我们提出了RS-CNN方法,即基于几何关系的卷积网络,它把原来基于有序信息的卷积网络扩展到可以适应无序信息。实现这一方法的关键因素在于从点云中提取出拓扑约束关系,进一步,卷积网络的权重在学习中也被拓扑关系约束,这样,我们就可以得到一个鲁棒的卷积网络。并且,基于这样的卷积网络,我们可以改进已有的点云识别系统,在数据集上的结果表明,它能够取得state-of-the-art的效果。
二、主要算法
1、主要思想
对于一般的点云处理任务,主要会面临以下挑战:
1)点云是无序的,因此要求学习的表示是置换不变的。
2)点云分布在3D几何空间中,因此要求学习的表示形式对刚性变换(例如旋转和平移)具有鲁棒性。
3)点云构成一个基本形状,因此,学习到的表示应具有判别性形状意识。
针对以上问题,本文提出了相应的解决办法,主要贡献如下:
1)提出了一种新型的从关系中学习的卷积算子关系形状卷积。它可以显式地对点的几何关系进行编码,从而在很大程度上提高了对形状的感知能力和鲁棒性。即RS-Conv。
2)提出一个具有关系形状卷积的深层层次结构,即,RS-CNN。将规则网格CNN扩展到不规则配置,实现点云的上下文形状感知学习。即基于RS-Conv设计的RS-CNN。
3)在三个任务中对具有挑战性的基准进行广泛的实验,以及深入的经验和理论分析,证明RS-CNN达到了SOTA的水平。
2、卷积模型(RS-Conv)
本文所提出的卷积方法的结构如下图所示:
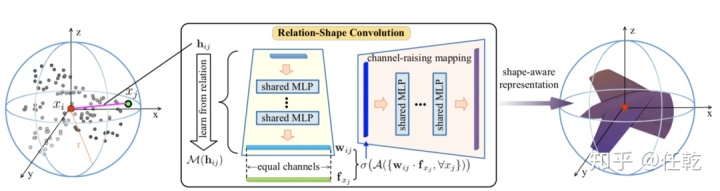
大致可以分为以下几步:
1)首先通过FPS进行采样,得到质心;
2)在球形领域寻找近邻;
3)对于每个邻居点,计算low-level信息;
4)使用MLP将low-level信息映射成高维信息;
5)max操作,聚合所有近邻的信息作为质心的新特征。
3、卷积网络(RS-CNN)
RS-CNN用于分类和分割网络的方式如下图所示:
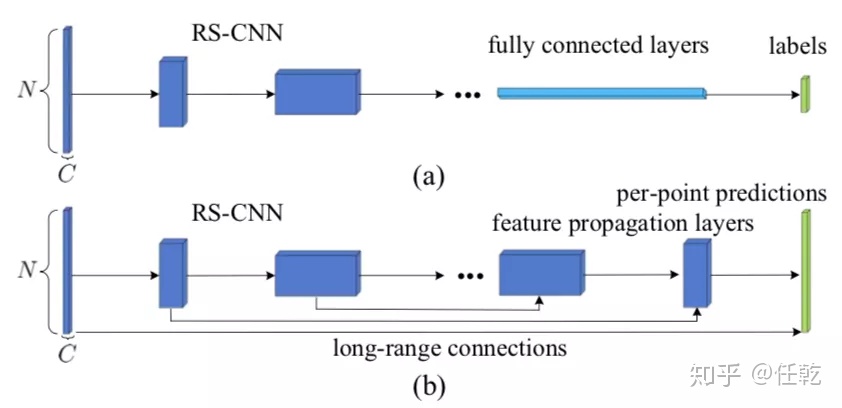
在这两个任务中,RS-CNN用于学习一组层次的Shapeaware表示。配置最终的全局表示形式,后跟三个完全连接的(FC)层,以进行分类。对于分割,通过特征传播对学习的多级表示进行连续上采样以生成每点预测。两者都可以端到端的方式进行训练。
三、实验
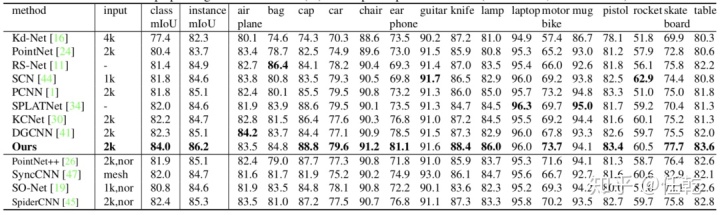
作者把该方法在ShapeNet数据集上和其他方法做了对比,结果如下表所示,从数据上看,在绝大部分形状上,本方法都取得了最好的效果。
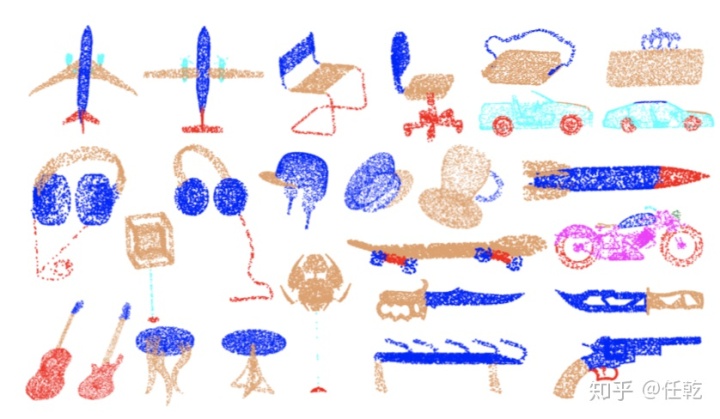
下面给出一些本方法做分割的演示结果:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









