





多传感器融合的体系结构
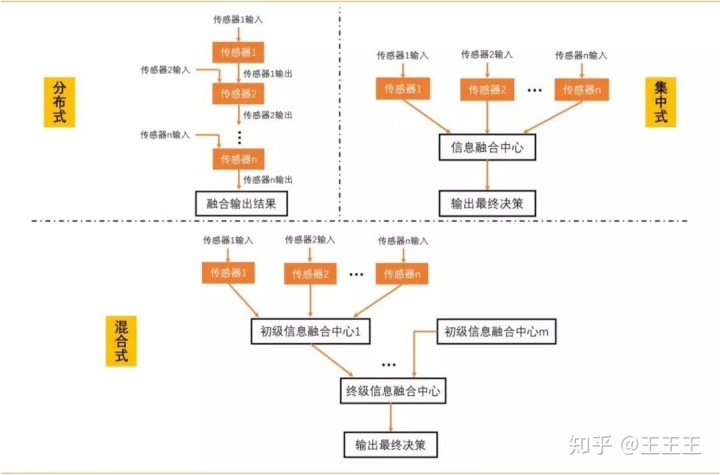
多传感器融合的体系结构:分布式、集中式和混合式。
1)分布式:先对各个独立传感器所获得的原始数据进行局部处理,然后再将结果送入信息融合中心进行智能优化组合来获得最终的结果。分布式对通信带宽的需求低、计算速度快、可靠性和延续性好,但跟踪的精度却远没有集中式高。
2 )集中式:集中式将各传感器获得的原始数据直接送至中央处理器进行融合处理,可以实现实时融合。其数据处理的精度高,算法灵活,缺点是对处理器的要求高,可靠性较低,数据量大,故难于实现。
3)混合式:混合式多传感器信息融合框架中,部分传感器采用集中式融合方式,剩余的传感器采用分布式融合方式。混合式融合框架具有较强的适应能力,兼顾了集中式融合和分布式的优点,稳定性强。混合式融合方式的结构比前两种融合方式的结构复杂,这样就加大了通信和计算上的代价。
多传感器信息融合的分类
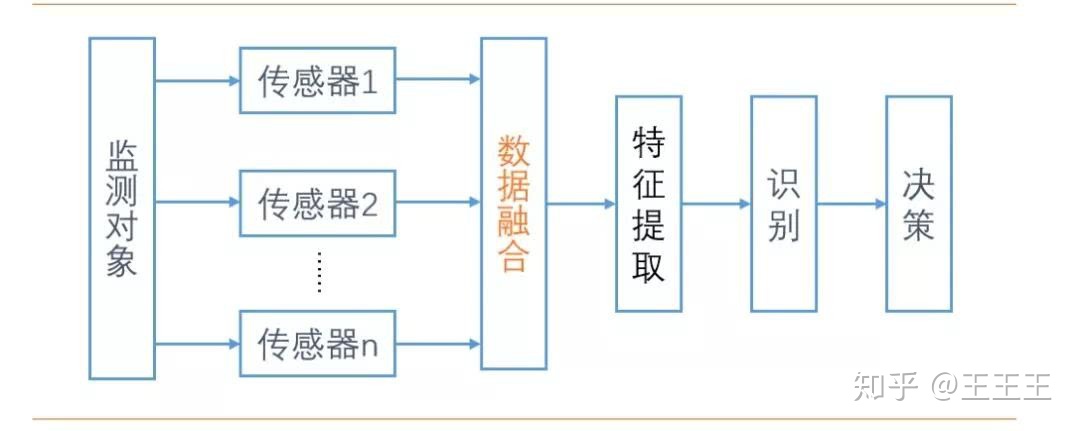
多传感器信息融合的分类:数据级融合、特征级融合和决策级融合
1)数据级融合:针对传感器采集的数据,依赖于传感器类型,进行同类数据的融合。数据级的融合要处理的数据都是在相同类别的传感器下采集,所以数据融合不能处理异构数据。
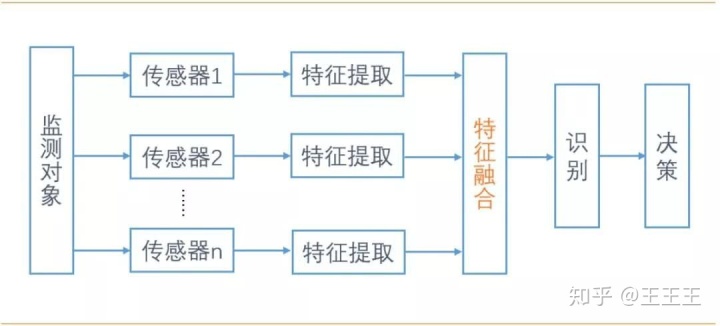
2)特征级融合:提取所采集数据包含的特征向量,用来体现所监测物理量的属性,这是面向监测对象特征的融合。如在图像数据的融合中,可以采用边沿的特征信息,来代替全部数据信息。
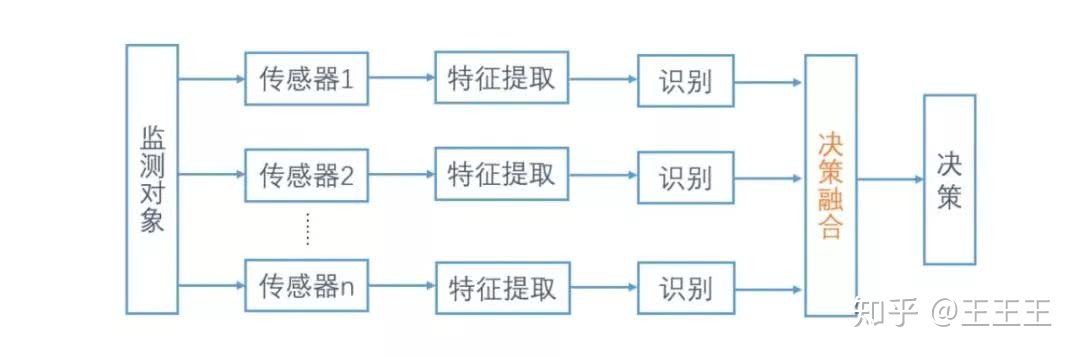
3)决策级融合:根据特征级融合所得到的数据特征,进行一定的判别、分类,以及简单的逻辑运算,根据应用需求进行较高级的决策,是高级的融合。决策级融合是面向应用的融合。
多传感器融合在硬件层面并不难实现,重点和难点都在算法上。多传感器融合软硬件难以分离,但算法是重点和难点,拥有很高的技术壁垒,因此算法将占据价值链的主要部分。















 5537
5537











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









