







多传感器信息融合的结构模型一般有四种基本形式:
集中式、分散式和分级式结构,分级式又分为有反馈结构和无反馈结构。
集中式结构
(使用卡尔曼滤波技术)
F(k)为状态转移矩阵, X(k)是k时刻目标的状态向量,G(k)为噪声增益矩阵,ω(k)为输入噪声模型,H(k)为观测矩阵,V(k)为观测噪声模型。

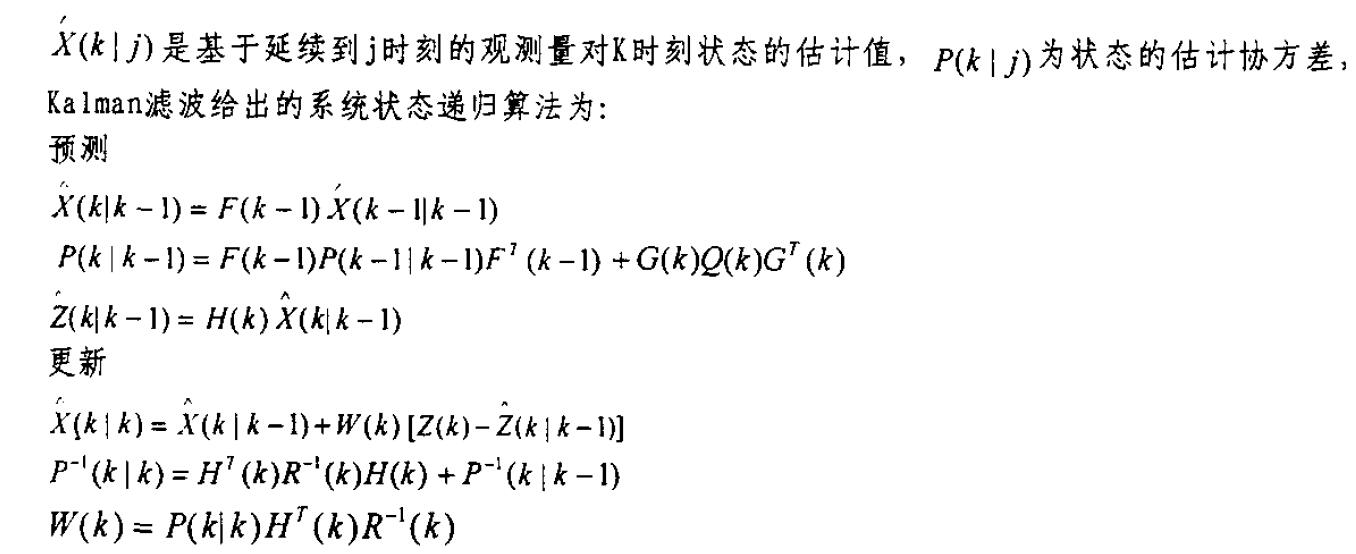
在系统融合中心采用集中卡尔曼滤波融合技术,可以得到系统的全局状态估计信息.在集中式结构中,各传感器信息的流向是自低层向融合中心单方向流动,各传感器之间缺乏必要的联系。
分散融合结构
分散融合结构没有中央处理单元,每个传感器都要求作出全局估计,采用分散Kalman滤波技术来实现多传感器信息的融合。为了简化算法,作以下三点假设:
传感器分散网络结构中的每一个融合节点都和其它节点直接相连;
节点的通信在一个周期内同时进行;
所有节点使用同样的状态空
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6235
6235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









