





前言
电控小白在和一些技术人员交流的时候,发现很多人并不清楚等功率变换和等幅值变换的区别,以及这两种变换方式如何选择,这里面不乏具有丰富经验的资深工程师和国内外知名高校毕业的高学历人员。
那么今天电控小白就来和大家讨论一下这两种变换方法对我们控制有什么影响,以及如何选择适合我们的坐标变换方法。
什么是3S/2S坐标变换?
在《什么是SVPWM发波及其实际应用讲解》中我们说到:对于对称的三相电压
在UVW三相静止坐标系下的合成矢量为逆时针方向旋转的电压矢量,旋转角速度和矢量幅值

那么我们来详细分析一下,为什么对称的三相电压的合成矢量是这样的。
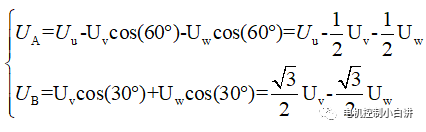
为了方便分析这个问题,我们在三相静止坐标系下再建立一个两相静止坐标系AB,其中A轴与U轴重合。

根据矢量分解和合成的方法,我们可以把UVW三个轴上的独立瞬时电压分解到AB两个轴上,转换公式如下:
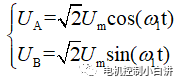
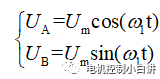
对于三相正弦信号,使用上述转换公式变换到AB轴上,其表达式为:

A轴和B轴之间的夹角为90°,所以合成矢量Us的幅值可以直接用勾股定理计算:


合成矢量的幅值固定为相电压幅值的(3/2)倍,合成矢量Us和A轴的夹角等于U相电压的相位角,这与前面分析一致。
这种将三相静止坐标系下的分量分解到两相静止坐标系下的变换方法就是3S/2S坐标变换。
从UVW到AB的直接变换矩阵为

利用这种直接变换矩阵进行坐标变换后,AB坐标系下的合成矢量与UVW坐标系下的合成矢量幅值和相位完全相同。
什么是等幅值坐标变换?
虽然直接变换矩阵得到矢量与真实的矢量完全相同,但是其幅值为相电压幅值的(3/2)倍,缺少直观的物理含义,并不方便软件的使用。
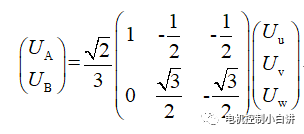
如果我们对坐标变换矩阵乘以一个系数(2/3),新的坐标变换矩阵为:

对于三相正弦信号,使用上述变换矩阵转换到AB轴上,其表达式为:
合成矢量的幅值满足以下约束条件

合成矢量幅值等于相电压幅值,这种坐标变换方法就是我们常说的等幅值变换。通过等幅值变换得到的合成矢量与真实矢量的相位相同,但是幅值不同。
等幅值变换是为了使计算得到的合成矢量幅值等于相电压的幅值,所以在直接变换矩阵前乘以(2/3)。
什么是等功率坐标变换?
接下来我们来讨论一下等功率变换。
等功率变换就是通过对直接变换矩阵乘以一个系数,使合成电压矢量和电流矢量的幅值乘积直接等于三相的总功率。
对于三相正弦的电压和电流量:

三相的总视在功率为
我们假定等功率变换的矩阵系数为k,即等功率变换矩阵为:

三相电压和电流经过等功率变换矩阵得到的矢量幅值为:

要满足等功率变换的要求,则

等功率变换矩阵

对于三相正弦信号,使用等功率变换到AB轴上,其表达式为:

等功率变换后的矢量幅值

工控行业知名厂家的选择
等幅值变换和等功率变换都是为了算法实现的方便,人为的在直接变换矩阵基础上引入一个系数。那么除了等幅值变换和等功率变换,我们是否还有其他的选择呢?
这里电控小白给大家分享一个在实际工程产品上得到广泛应用的坐标变换方法:等有效值变换。等有效值变换的目标是使合成矢量的幅值直接等于相电压的有效值。
我们实际的电机和电机控制器产品都会有对应的铭牌参数,在工业控制领域,铭牌参数基本都是标注的电压和电流的有效值;因此采用等有效值变换得到的矢量幅值可以非常直观的和铭牌参数对应,这样我们就能通过矢量幅值清晰的掌控电机和电控的运行状态。
等有效值变换在国内外知名厂商的变频器产品上得到了广泛的使用,比如工控领域的世界领导者西门子和艾默生等。
接下来我们来分析一下等有效值变换的矩阵系数:假定系数k1,等有效值变换矩阵
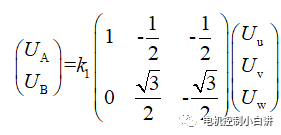
三相电压经过等有效值变换矩阵得到的矢量幅值为:

等有效值变换矩阵为
对于三相正弦信号,使用等有效值变换到AB轴上,其表达式为:
等有效值变换后的矢量幅值

什么是旋转坐标变换
通过前面的3S/2S坐标变换,虽然能将三相坐标系分量转换到两相静止直角坐标系下,对矢量的角度、幅值的分析和理解都更加方便;但是两相静止坐标系下的AB分量仍然是交流分量。

在经典控制理论中,我们常用PI调节器实现对反馈信号对指令的跟随,虽然PI调节器的参数鲁棒性好,但PI调节器难以实现对高频指令信号的无差跟随,因此在实际工程中,几乎没有直接在两相静止AB坐标系进行矢量控制的。
对于三相对称信号,其合成矢量在静止坐标系下是以恒定角速度旋转的。

因此我们只需要定义一个与合成矢量相同角速度旋转的坐标系DQ,那么合成矢量在这个旋转坐标系下的分量将变为直流分量。

将AB轴的分量分解到DQ轴上

旋变坐标变换的矩阵为
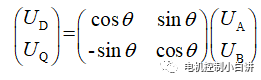
对等有效值变换后的AB分量进行旋转变换得到DQ轴分量为

从上式也能看出,只要满足

这样UD和UQ均为直流量,且UD和UQ合成矢量的幅值为Um,所以旋转坐标变换不会改变合成矢量的幅值。
DQ坐标系的旋转速度和Us相同,因此DQ轴系也叫同步旋转坐标系。
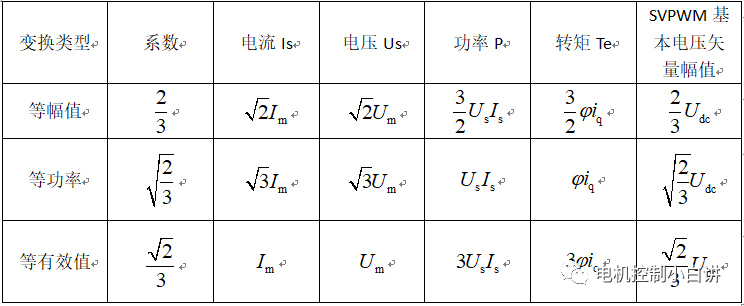
三种典型坐标变换系数整理
三种典型坐标变换的本质都是将三相静止坐标系下的分量变换到两相静止坐标系下,只是乘以了不同的系数而已,因此不同的坐标变换对控制系统的影响主要体现在计算其他物理量的系数差异而已,在这里电控小白为大家进行了整理。
总结
等幅值变换、等功率变换和等有效值变换并没有想象中的那么复杂和难以理解,它们只是出于不同的目的,在直接变换矩阵的基础上乘以了一定的系数。
对于坐标变换类型的选择并没有特殊的要求,只要选定坐标变换类型之后,在控制过程中计算相关的物理量时使用正确的系数就不会出现任何问题,它们对控制系统本身的稳定性并没有任何影响,影响的只是你的使用习惯而已。
限于篇幅原因,本期文章没有对不同坐标变换类型对控制软件产生的影响进行详细说明;电控小白将在下期文章中详细分析使用不同坐标变换过程中,控制软件需要注意什么;以及采用不同的坐标变换方式为什么最后能把电机控制到相同的转态。
以上就是本次的分享内容,希望电控小白的这次分享能让您对坐标变换的选择和使用有所帮助。
我们不做理论的搬运工,我们只研究如何把深奥的理论简单化并工程化,我是电控小白,分享对电机控制的理解。
















 924
924











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









