







基于高清地图的定位是高清地图的主要作用,而定位本身是不会局于此的,实际上自动驾驶的定位也会采用传感器融合的思路,即采用GPS/DGPS(比如RTK),IMU,摄像头,激光雷达加高清地图的组合。
GPS定位是经典的方法,因为精度低就有了差分GPS即DGPS,比如RTK技术。国内千寻网络背靠中国兵器工业集团和阿里巴巴集团两个大公司,提供这方面的服务。具体技术如何,精度怎样,服务怎样,自己谷歌吧。
激光雷达点云数据做定位的方法,ICP肯定不行,计算量太大。大家熟悉的常用算法,有NDT(normal distributions transform),斯坦福大学的histogram filter 和particle filter之类。要求车载有激光雷达,实时采集现场点云数据。当然,也有压缩点云数据的快速匹配定位方法,比如TomTom的RoadDNA,Civil Maps的Fingerprint Map,定位难度和精度上会有所折衷。
IMU是可以定位的,只是它的原理来自于积分,累计误差大,一般和GPS或者激光雷达/摄像头联合使用。
摄像头定位是视觉SLAM采用的,以前有Image-based Re-localization课题,用于SLAM的loop closure检测,tracking failure恢复等等。不管是稀疏法还是致密法,或者半致密法,都有不少的研究论文可以查到。
不过,在这里我是继续上一个话题,即基于车道线的制图技术,通过一些论文讨论如何应用车道线对车辆定位的方法。
注:车道线检测这个题目太大,在此忽略,以后再总结。
Fast Symbolic Road Marking and Stop-line Detection for Vehicle Localization
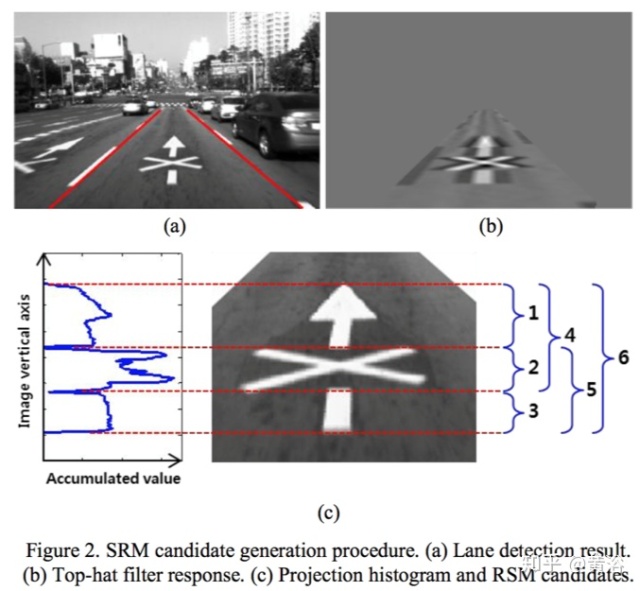
Symbolic Road Marking (SRM)包括下图的9个种类,加上停车线,共10种路标可以用来做定位。

下图是SRM产生候选的流程:
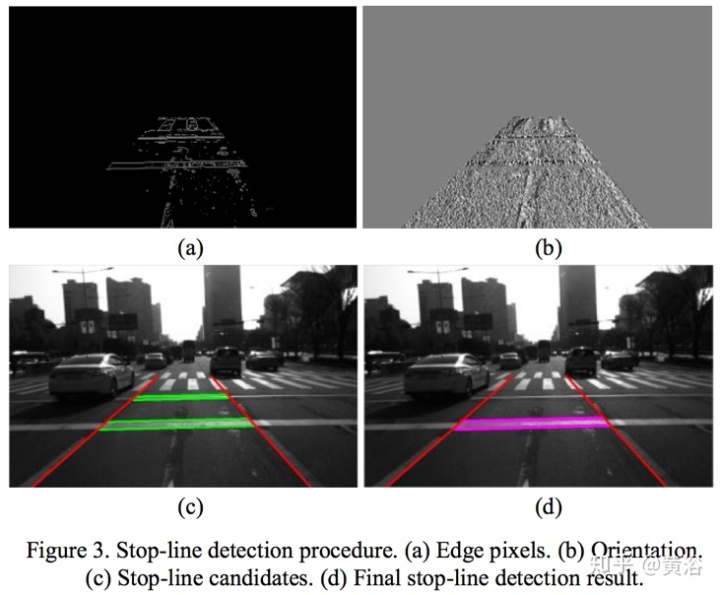
而这里是停车线检测的流程:
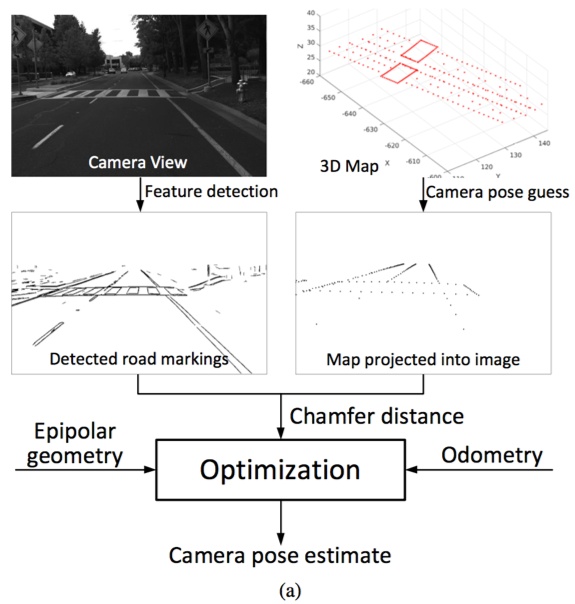
Vehicle Localization using Road Markings
这里路标包括箭头,斑马线和限速。下图是如何检测路标的:从左到右是原始图像,校准的IPM,ROI检测和FAST特征。

下图是:路标重复检测,连续帧结果逐行显示,即帧#,原始图像,IPM,车辆位置。蓝十字标记估计位置,粉色表示GPS位置,还有道路线GPS位置是红色。
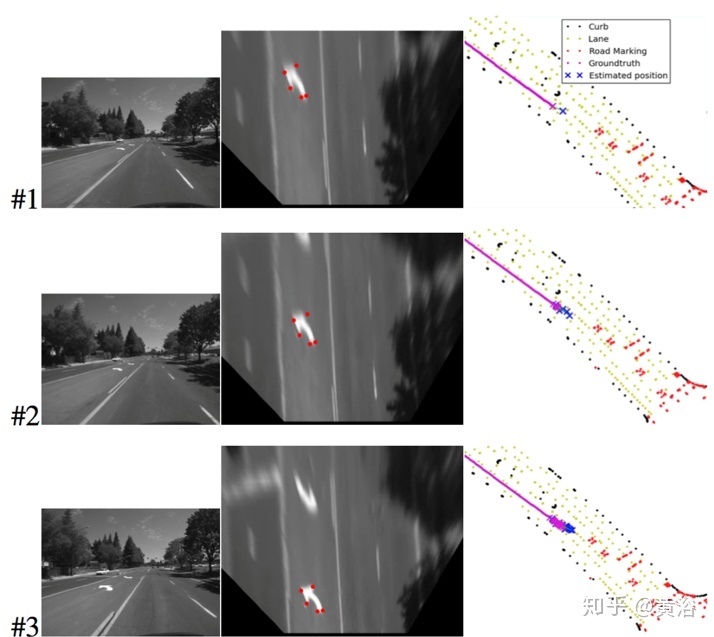
姿态估计中PNP算法比IPM差。下图是路标的两个例子:显示提取的角点(红色)。实际上这些角点带有GPS位置信息,被存入地图的数据库。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1184
1184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









