







一、前言
Buck DCDC的基本框架主要分为传统电压环DCDC、传统电流环DCDC、和COT(Constant ON-Time) DCDC等几类,其基本框架如下介绍。
传统电压环DCDC
电压环DCDC属于单环控制模式,有且仅有输出电压反馈环,内部Saw OSC振荡器产生的信号波形幅度大,抗噪能力强;但它的瞬态响应很慢,原因是为了优化次谐波振荡,需要在误差放大器位置对VFB进行斜坡补偿,使得DCDC系统稳定;且无电流限功能。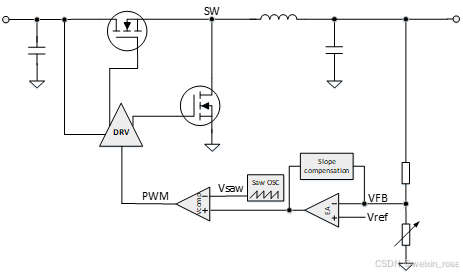
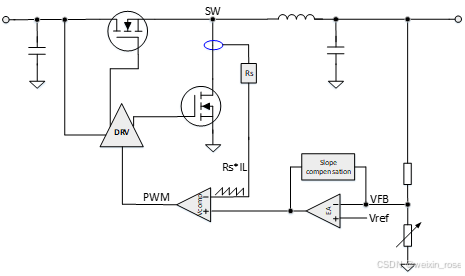
传统电流环DCDC
电流环DCDC属于双环控制模式,根据电流检测的位置,分为峰值电流环控制模式、谷值电流环控制模式和平均电流环控制模式,主要由输出电压反馈环和电流环两个环路来实现控制,其瞬态响应比电压环更好,且有自动限流的功能,但仍需要斜坡补偿网络,且对噪声敏感。
单环COT DCDC
单环COT DCDC,区别于传统电流环和电压环DCDC,它的主要特点是没有复杂的斜坡补偿电路,只是将输出电压VFB的纹波谷值与比较
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3884
3884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









