






一.多维Eliipse方程
二.正交左边系下的椭球形状分析
对于坐标中的椭球而言,中心,截距以及坐标中的方向唯一决定了一个椭球
2.1 特殊情况
当为对角矩阵时,方程变为
比对平面椭圆方程,可知上述方程对应的椭球是以为中心,以
为各个基的截距的,方向不倾斜的椭球
2.2 一般情况
当不是对角矩阵时,椭球相对坐标基倾斜,此时的截距以及椭球方向需要做一些变换才能得到。
参考二维坐标下倾斜椭圆公式与变换,[参考]
我们发现,需要寻找一个旋转矩阵,将当前坐标系进行旋转,使得新的坐标系下变成对角矩阵,由此就可以轻松的得到截距,方向也可以由旋转矩阵得到。
现在,我们假设旋转矩阵为,这里要注意的是,我们只进行旋转而不进行坐标放缩,所以旋转矩阵是一个正交矩阵,有
.
为了方便表述,我们令
此时,有
即的每一列都是
的特征向量,对应的对角线元素为特征值
至此,我们可以得到,一般情况下,椭圆方程对应的椭球是以为中心,以
的特征值的倒数为为各个基的截距的,以
的特征向量组成的矩阵为旋转方向的椭球!
进一步的,如果存在0特征值,则该维度的椭球截距无穷大,椭球退化。
三,应用
1 多维高斯随机变量的等高线投影(相同马氏距离)为Eliipse,可由此直观可视化高斯概密。
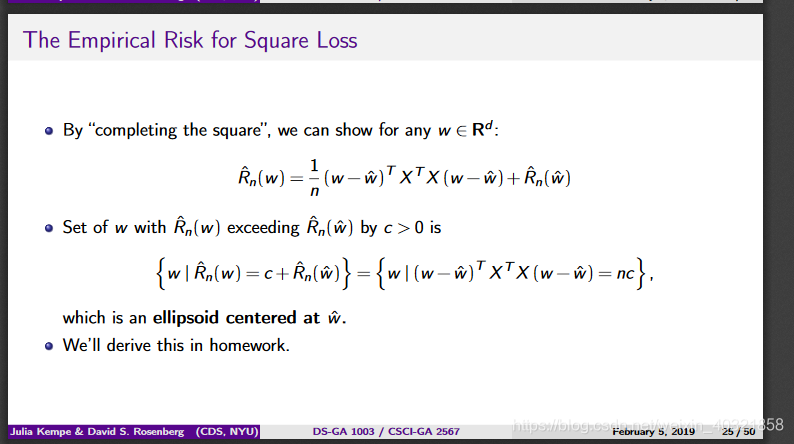
2 多维线性回归问题,以平方差为损失函数时,损失函数等高线为Eliipse

















 3281
3281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









