






1.通过docker启动PX4无人机
启动成功:
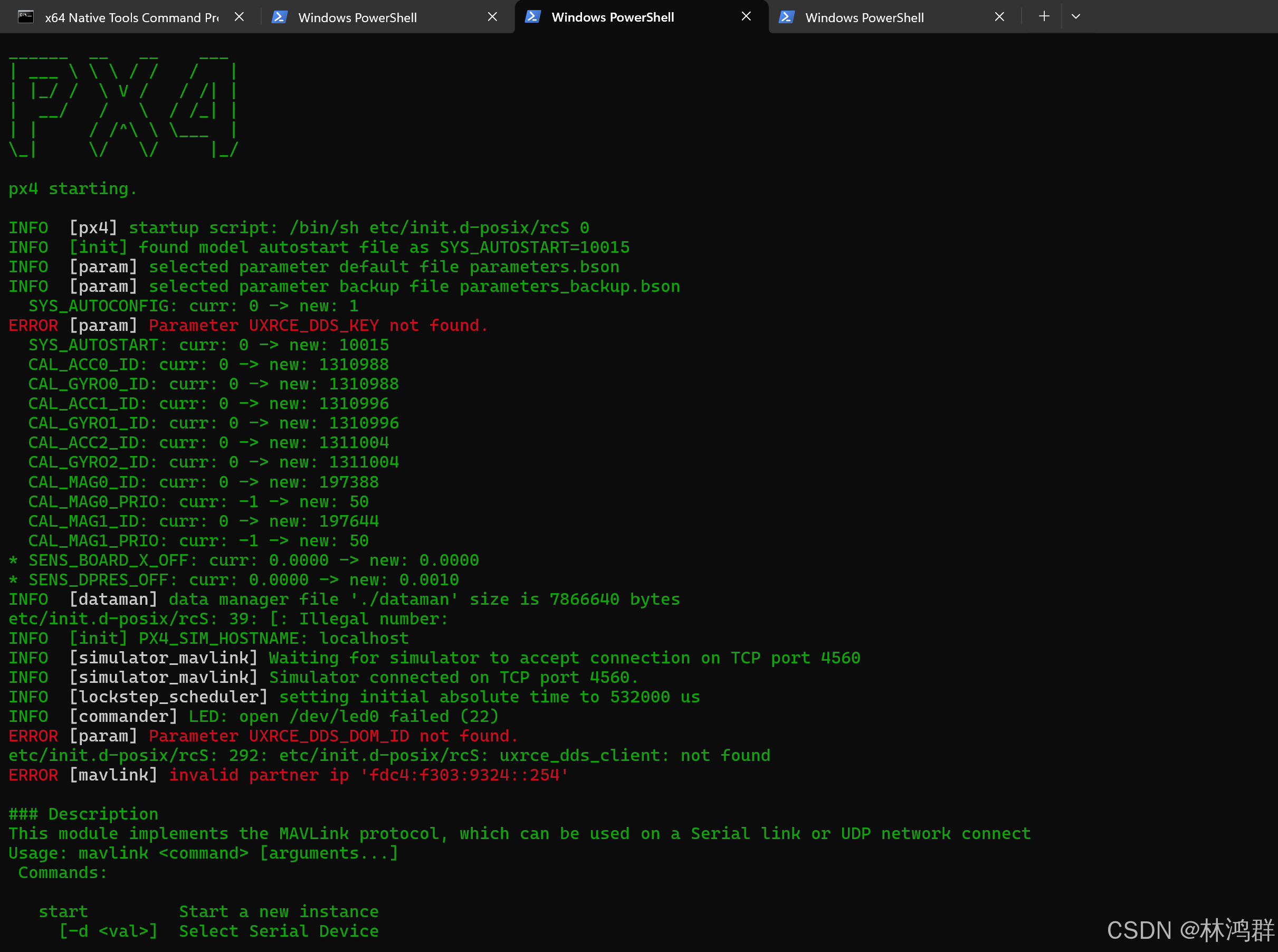
PX4完全启动OK如下:
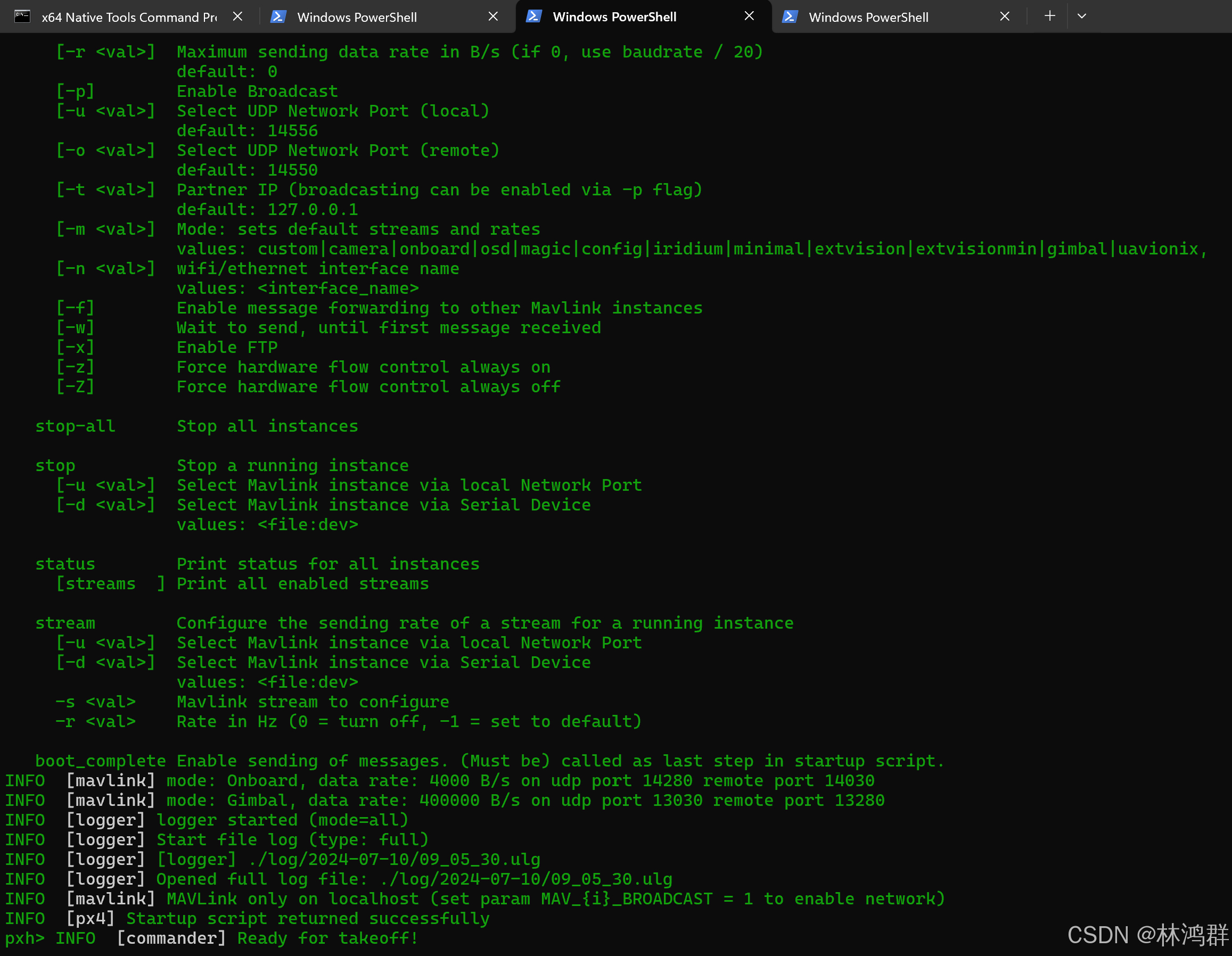
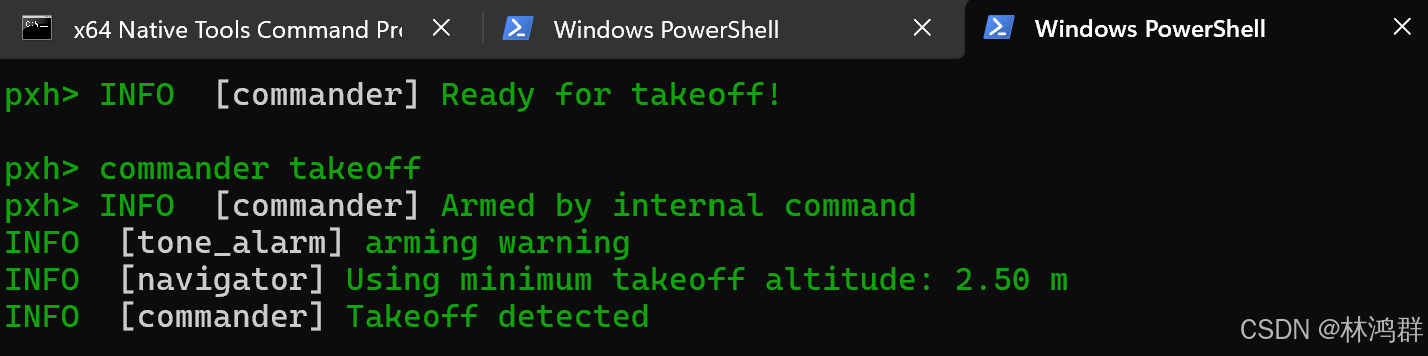
会看到pxh> INFO [commander] Ready for takeoff!
执行takeoff指令
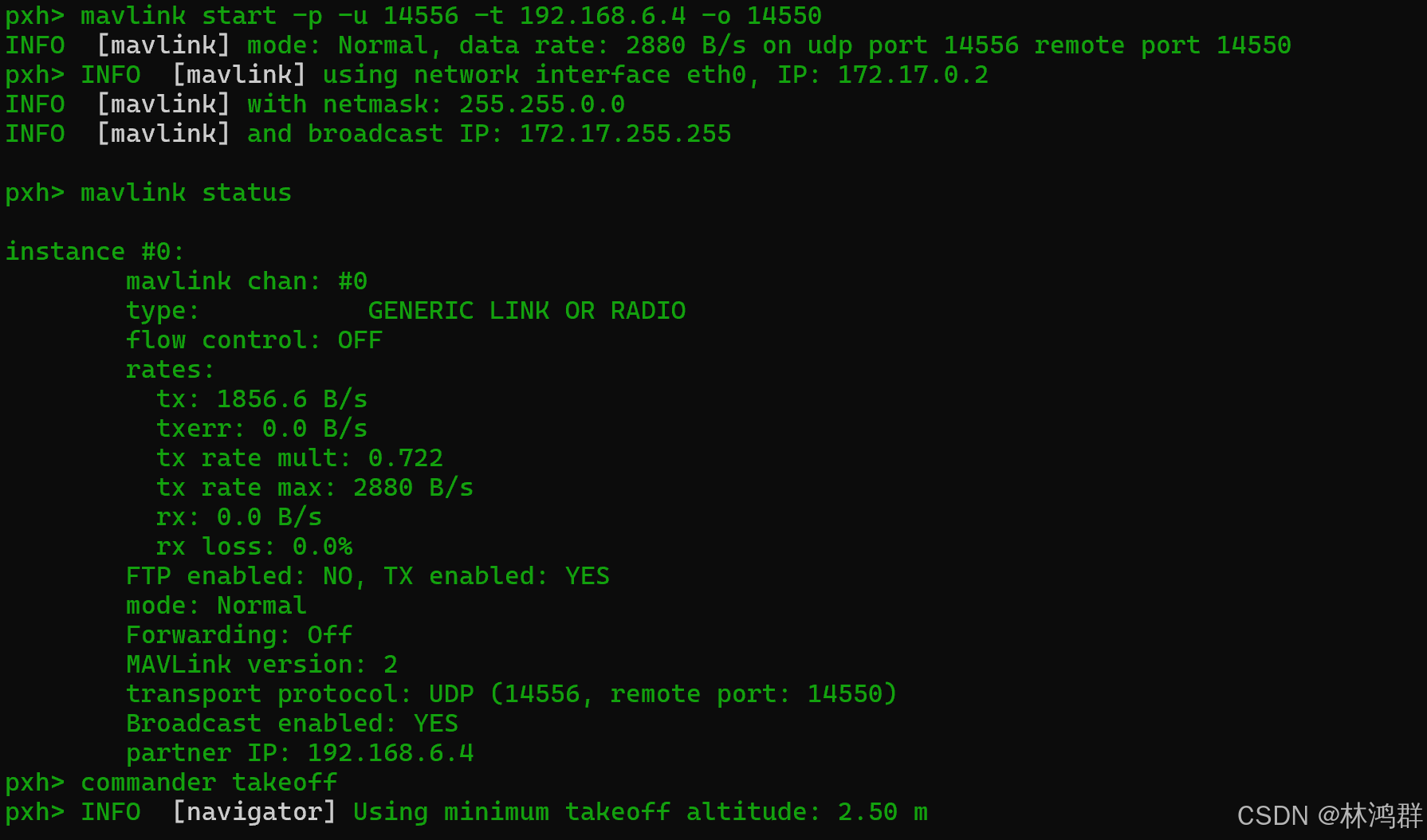
查看运行docker容器与QGC客户端的主机IP:

192.168.6.4为主机IP
启动一个实例给QGC连接:
成功启动一个飞机实例
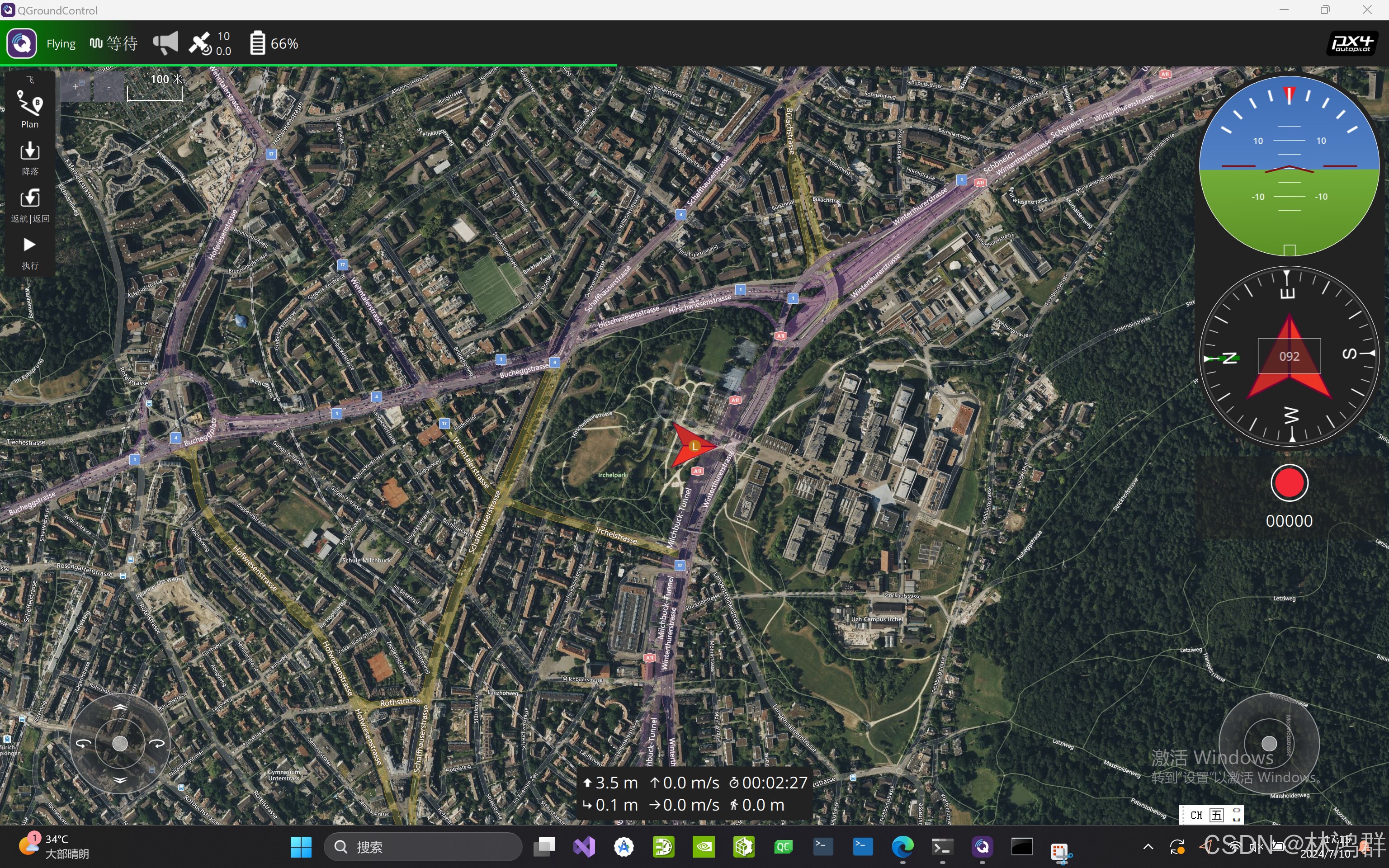
双打QGC,成功链接到Docker中的PX4无人机
1.通过docker启动PX4无人机
启动成功:
PX4完全启动OK如下:
会看到pxh> INFO [commander] Ready for takeoff!
执行takeoff指令
查看运行docker容器与QGC客户端的主机IP:
192.168.6.4为主机IP
启动一个实例给QGC连接:
成功启动一个飞机实例
双打QGC,成功链接到Docker中的PX4无人机

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1万+
1万+





