










第10章:稳定性与控制
目录
- 引言
- 静态稳定性
- 飞机参考轴
- 静态纵向稳定性
- 中性点
- 静态裕度
- 配平和可控性
- 关键事实1
- 静态纵向稳定性的图形表示
- 组成部件表面的贡献
- 无动力稳定性
- 重心位置的影响
- 动力效应
- 高升力装置
- 操纵力稳定性
- 机动稳定性
- 每"g"的操纵杆力
- 调整操纵力
- 纵向控制
- 机动控制要求
- 起飞控制要求
- 着陆控制要求
- 动态稳定性
- 纵向动态稳定性
- 长周期振荡(俯仰振荡)
- 短周期振荡
- 方向稳定性和控制
- 侧滑角
- 静态方向稳定性
- 飞机组件的贡献
- 横向稳定性和控制
- 静态横向稳定性
- 飞机组件的贡献
- 横向动态效应
- 螺旋发散
- 荷兰滚
- 驾驶员诱导振荡(PIO)
- 高马赫数
- 马赫配平
- 关键事实2
- 总结
- 问题
- 关键事实1(完整版)
- 关键事实2(完整版)
- 答案
引言
稳定性是飞机的一项基本特性,指飞机在受到外部干扰后能够自行恢复到稳定飞行状态的能力。一架优秀的飞机应当具备以下基本品质:
- 具有足够的稳定性以维持平稳飞行状态
- 能够从各种外部干扰中自行恢复
- 具备适当的稳定性以减轻飞行员的工作负担
- 对控制输入有适当的响应,能够在保持足够机动性的同时达到设计性能要求
稳定性可分为静态稳定性和动态稳定性两大类。本章将首先讨论静态稳定性的概念和特点。
静态稳定性
当飞机处于平衡状态(或称配平状态)时,所有作用于飞机的力和力矩的合力均为零。此时飞机不存在加速度,将保持稳定飞行状态。如果这种平衡状态被阵风或控制面偏转等因素打破,飞机将由于力或力矩的不平衡而产生加速度。
飞机的静态稳定性可根据其在干扰力移除后的初始运动趋势来判定:
-
正静态稳定性:飞机从平衡状态被扰动后,具有返回平衡状态的初始趋势。这是最理想的稳定性状态。
-
中性静态稳定性:飞机被扰动后,既不表现出返回平衡状态的趋势,也不会继续向扰动方向运动,飞机将保持在新的状态。
-
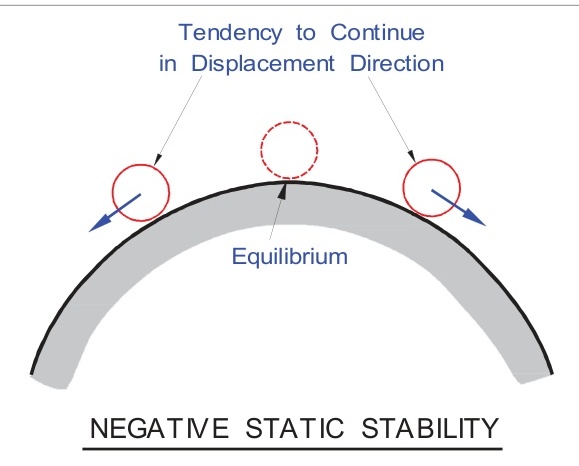
负静态稳定性:飞机被扰动后,具有继续向扰动方向运动的趋势。这种状态是不稳定的,应当避免。
三种类型的静态稳定性示例如图10.1、图10.2和图10.3所示。
图10.1说明了正静态稳定性(或静态稳定性)的情况。球从沟槽底部的平衡位置被移开。当干扰力被移除时,球的初始趋势是返回平衡状态。球可能会在平衡点来回滚动,但向任一侧的位移都会产生返回的初始趋势。
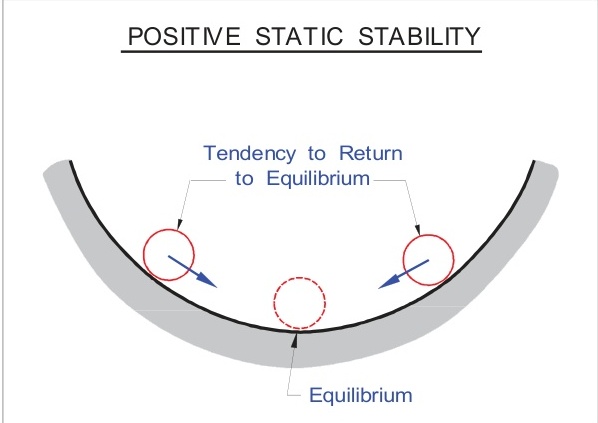
图10.2说明了中性静态稳定性的情况。球在任何位移点都会遇到新的平衡,没有返回原始平衡的趋势。
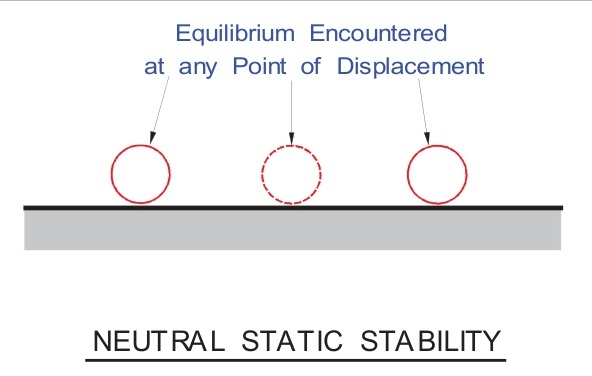
图10.3说明了负静态稳定性(或静态不稳定性)的情况。从山顶平衡点的位移会产生更大位移的趋势。
"静态"一词应用于这种形式的稳定性,因为不考虑任何由此产生的运动。静态稳定性只考虑返回平衡的初始趋势。
飞机的静态纵向稳定性是通过使其从某个配平攻角位移来评估的。
如果这种位移产生的气动俯仰力矩倾向于使飞机返回平衡攻角,则飞机具有正静态纵向稳定性。
飞机参考轴
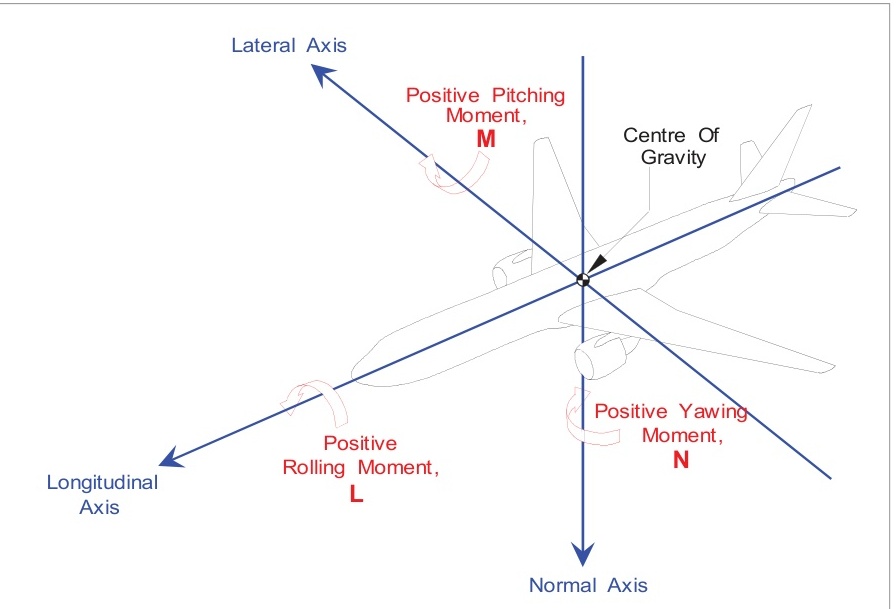
为了准确描述飞机上的力和力矩,需要建立一个通过重心的参考轴系统。如图10.4所示,这是一个标准的右手坐标系统,包含以下三个轴:
-
纵轴:从机头经重心延伸至机尾。绕此轴的力矩称为滚转力矩(L),向右滚转定义为正方向。
-
法向轴:垂直穿过重心,与纵轴成90°角。绕此轴的力矩称为偏航力矩(N),向右偏航定义为正方向。
-
横轴:穿过重心并平行于翼尖连线。绕此轴的力矩称为俯仰力矩(M),机头上仰定义为正方向。
横轴是一条穿过重心的线,平行于穿过翼尖的线。绕横轴的力矩是俯仰力矩M,机头上仰是正俯仰力矩。
静态纵向稳定性
纵向稳定性是绕横轴的运动。为避免混淆,考虑特定类型稳定性所涉及的轴。因此,横向稳定性是绕纵轴(滚转),方向稳定性是绕法向轴(偏航),纵向稳定性是绕横轴(俯仰)。首先考虑静态纵向稳定性,因为它可以单独研究;通常,它不与其他两个轴的运动相互作用。横向和方向稳定性往往相互作用(耦合运动),这些将在后面研究。
-
当飞机被阵风或控制输入从配平攻角位移后,如果它倾向于返回配平攻角,则表现出静态纵向稳定性。
- 飞机必须具有正静态纵向稳定性。如果稳定,飞机安全且易于驾驶,因为它会寻求并保持配平飞行状态。同样,控制偏转和控制"感觉"(操纵杆力)必须在方向和大小上都合乎逻辑。
-
如果飞机是中性稳定的,它倾向于保持被干扰到的任何位移状态。
- 中性静态纵向稳定性通常定义了飞机稳定性的下限,因为它是稳定性和不稳定性之间的边界。具有中性静态纵向稳定性的飞机可能对控制过度敏感,且飞机在受到干扰后没有返回配平的趋势——这通常是不可接受的。
-
不稳定的飞机将继续向干扰方向俯仰,直到位移被相反的控制力抵消。
- 具有负静态纵向稳定性的飞机本质上会偏离任何预期的配平状态。如果飞机还能飞行,它无法配平,且需要不合逻辑的控制力和偏转来在姿态和空速变化时提供平衡——这显然是完全不可接受的。
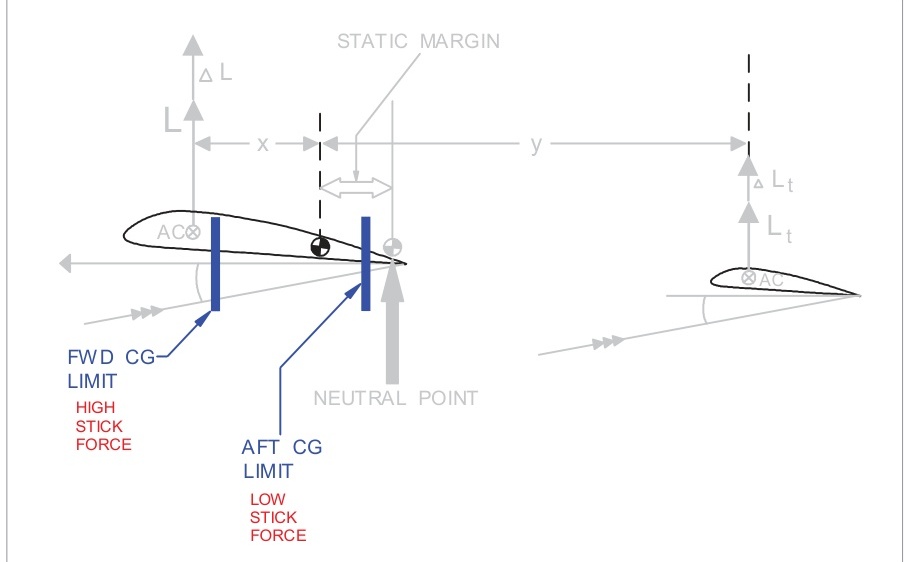
为了研究稳定性,考虑由于攻角变化而导致的升力大小变化,这些变化通过一个固定点——气动中心(AC)作用。应记住,AC的位置在四分之一弦长处(或前缘后25%)。应注意,AC处的俯仰力矩为负(机头向下),且这个负(机头向下)的AC处俯仰力矩不随攻角变化而变化。图10.5。
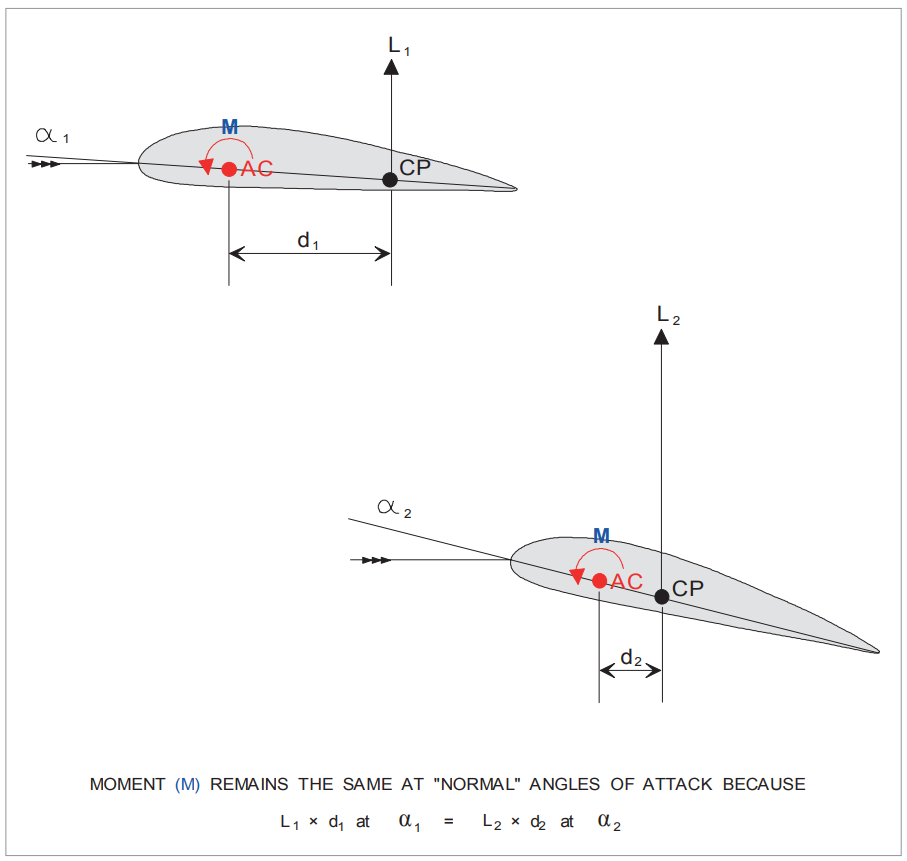
AC处的俯仰力矩随着攻角增加而保持不变,因为升力大小增加但由于压力中心向前移动而通过较小的力臂作用。只有在AC(25%弦长)处才会出现这种情况。如果考虑AC前面或后面的点,俯仰力矩会随攻角变化而变化。
为了研究稳定性,我们将考虑升力作用于AC。AC是一个固定点,仅当气流为亚音速时位于25%弦长处。
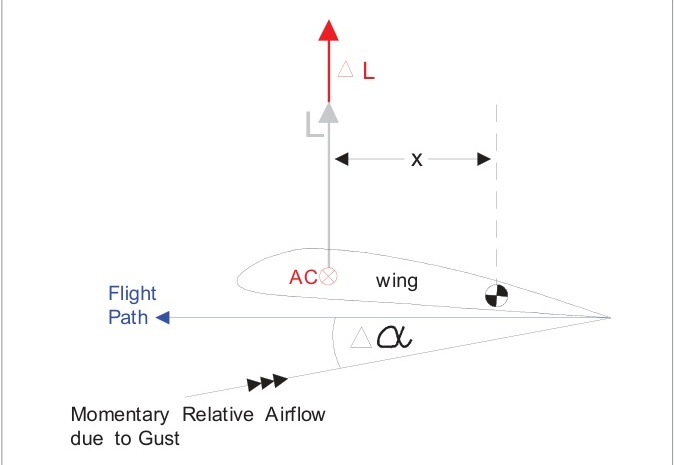
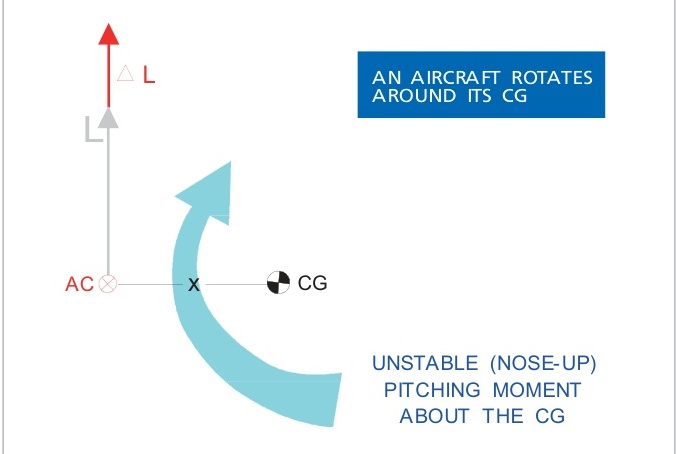
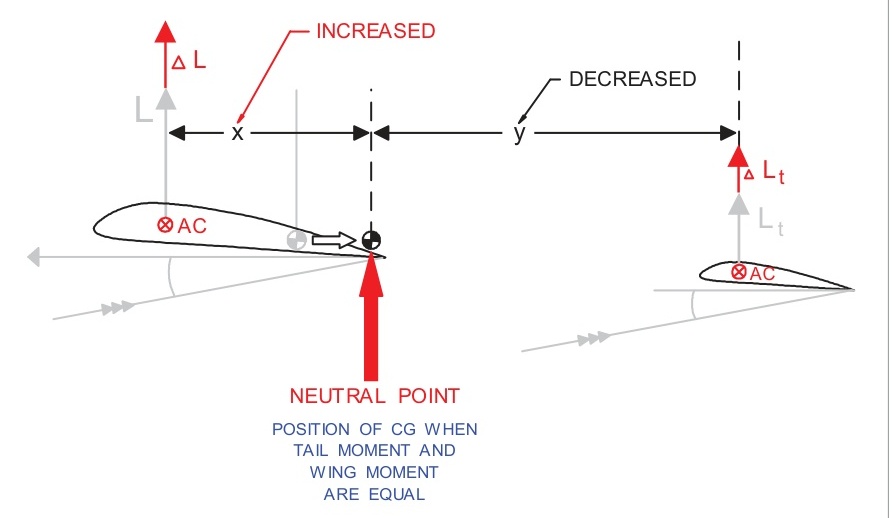
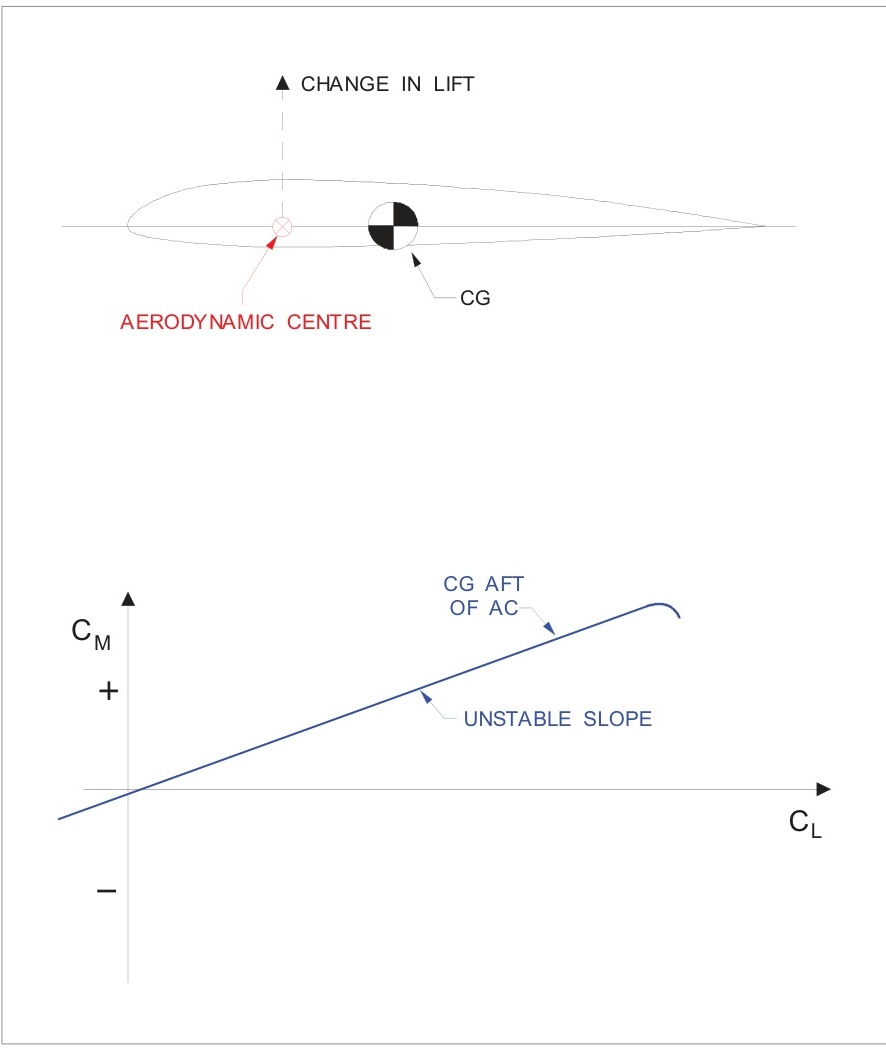
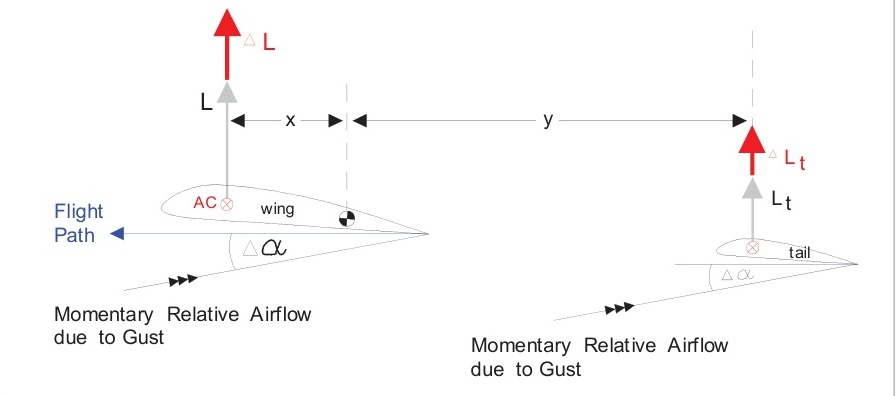
单独考虑的机翼是静态不稳定的,因为AC在重心前面,图10.6。垂直阵风会暂时增加攻角并增加升力(ΔL),这与力臂’x’相乘,将产生绕重心的正(机头上仰)俯仰力矩。这将倾向于进一步增加攻角,形成不稳定的俯仰力矩。单独的机翼会绕重心向上旋转,图10.7。
现在考虑带有水平尾翼的机翼。水平尾翼的位置使其能够产生绕飞机重心的稳定俯仰力矩。同样的垂直阵风将增加水平尾翼的攻角并增加尾翼升力(ΔLt),这与力臂’y’相乘,将产生绕飞机重心的负(机头向下)俯仰力矩。
如果尾部力矩大于机翼力矩,力矩总和将不为零,产生的机头向下力矩将导致绕重心的角加速度。绕重心的机头向下角加速度将使飞机返回其原始平衡位置。尾部力矩相对于机翼力矩越大,向原始平衡位置加速的速率就越大。(过大的角加速度不好)。
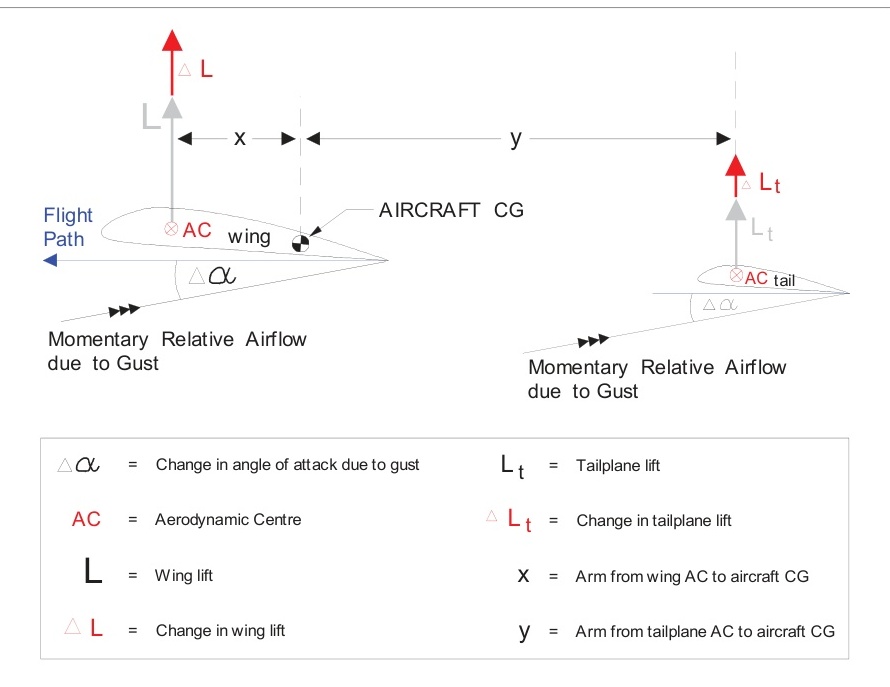
需要考虑两个力矩:机翼力矩和尾部力矩。机翼力矩是机翼升力变化乘以力臂 x ′ x^{\prime } x′的函数。尾部力矩是尾翼升力变化乘以力臂 ’y’ \text {'y'} ’y’的函数,图10.8。两个力臂的长度取决于重心位置。如果重心位于更前位置,尾部力臂更大,机翼力臂更小。更前的重心位置增加了静态纵向稳定性。
如果机头向下(负)的尾部力矩大于机头上仰(正)的机翼力矩,飞机将具有静态纵向稳定性。
中性点
如果考虑重心从静态纵向稳定位置向后移动:
-
尾部力臂’y’将减小,机翼力臂’x’将增加;因此,
-
(负)尾部力矩将减小,(正)机翼力矩将增加,图10.9。
最终,重心将达到一个位置,此时尾部力矩与机翼力矩相同。如果垂直阵风使飞机机头上仰,力矩总和将为零,没有角加速度使飞机返回其原始平衡位置。
由于没有合力矩,无论是机头上仰还是机头向下,飞机将保持其新的平衡位置;飞机将具有中性静态纵向稳定性。见第245页。
当由阵风引起的尾部力矩和机翼力矩变化总和为零时,重心的位置被称为中性点,图10.9。
静态裕度
我们已经确定,当重心位于中性点时,飞机将具有中性静态纵向稳定性,即由干扰引起的机翼力矩和尾部力矩变化总和为零。
如果重心位于中性点稍前,尾部力矩将略大于机翼力矩(力臂’y’增加,力臂’x’减小)。增加攻角的垂直阵风将产生绕重心的小机头向下角加速度,这将轻轻地使飞机返回其原始配平(平衡)位置。
重心越靠前,绕重心的机头向下角加速度越大——静态纵向稳定性程度越高。
中性点是研究静态纵向稳定性的重要参考点。实际上,重心永远不会被允许向后移动到达中性点。飞机对控制会变得太敏感。
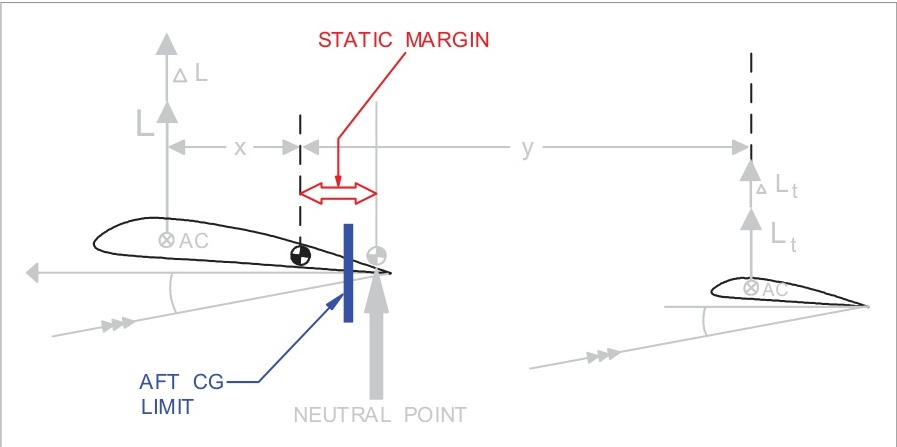
已经指出,重心离中性点越远,静态纵向稳定性越大。重心在中性点前面的距离将给出静态纵向稳定性的度量;这个距离被称为静态裕度,图10.10。静态裕度越大,静态纵向稳定性越大。
始终需要一定程度的静态纵向稳定性,因此后重心限制将位于中性点前面的某个距离。中性点与后重心限制之间的距离给出了所需的最小静态稳定性裕度。
配平和可控性
如果飞机在俯仰、滚转和偏航方面的所有力矩都等于零,则称其处于配平状态(已配平)。在各种飞行条件下建立配平(平衡)可通过以下方式实现:
-
飞行员努力
-
配平片
-
可变入射角配平水平尾翼
-
在机翼油箱和后部配平油箱之间移动燃油,或
-
控制面执行器的偏置(动力飞行控制)
可控性一词指的是飞机对控制面偏转的响应能力,以达到所需的飞行状态。必须有足够的可控性来执行起飞和着陆,并完成飞行中的各种机动。
稳定性和可控性之间存在矛盾。高度的稳定性会降低可控性。静态稳定性和可控性之间的关系通过以下四个图示说明。
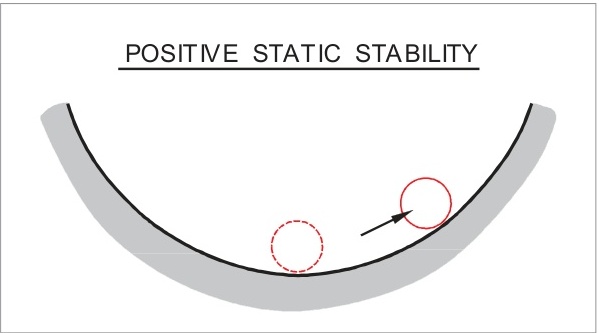
静态稳定性的程度由放置在各种表面上的球来说明。正静态稳定性由沟槽中的球表示,图10.11;如果球从沟槽底部的平衡位置移开,有返回平衡的初始趋势。如果希望"控制"球并将其保持在位移位置,必须在位移方向上施加力以平衡固有的返回平衡趋势。
飞机中同样的稳定趋势同样抵抗来自配平的位移,无论是由飞行员在控制上的努力(操纵杆力)还是大气干扰。
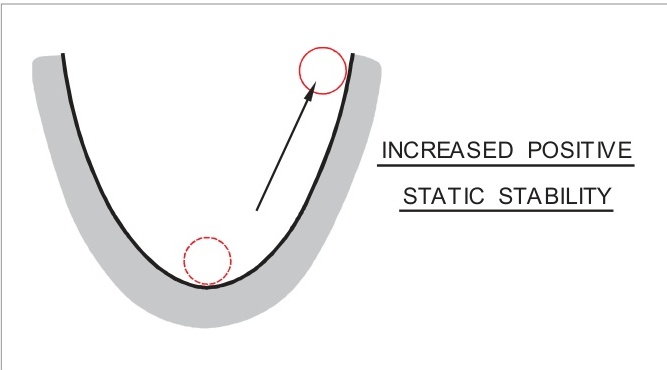
增加静态稳定性(重心前移)对可控性的影响由更陡峭沟槽中的球说明,图10.12。当静态稳定性增加时,需要更大的力来"控制"球到相同的位移位置。这样,大程度的静态稳定性使飞机不那么可控。在飞机设计过程中,必须在静态稳定性和可控性之间达到适当的比例,因为过多的静态稳定性(重心前移位置)会降低可控性。前重心限制的设定是为了确保最小可控性,图10.13。
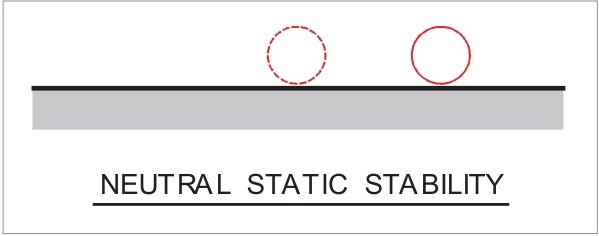
减少静态稳定性对可控性的影响由平面上的球表示,图10.14。如果存在中性静态稳定性(重心在中性点上),球可能从平衡位置移开,没有返回的趋势。获得了一个新的平衡点,不需要力来维持位移。随着静态稳定性接近零,可控性增加到无限大,对位移的唯一阻力是对位移运动的阻力,即气动阻尼。因此,减少静态稳定性(重心后移)增加了可控性。如果飞机的稳定性太低,控制偏转可能会导致飞机过度位移。
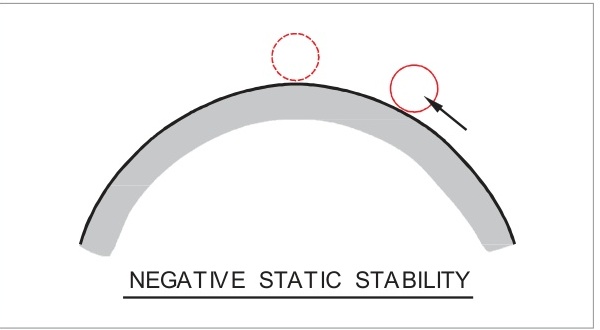
静态不稳定性对可控性的影响(重心在中性点后面)如图10.15所示,由山顶上的球表示。如果球从山顶的平衡位置移开,初始趋势是球继续向位移方向移动。为了在这个位移位置"控制"球,必须施加与位移方向相反的力。
这种效果在飞行中会表现为飞机的不稳定"感觉"。如果控制被偏转以增加攻角,飞机需要被"保持"在较高的攻角,通过推力来防止飞机继续向上仰方向移动。飞行员将通过尝试维持平衡来提供稳定性;这是完全不可接受的!
关键事实 1
自学(参考前面的段落填入缺失的词)。
稳定性是飞机在受到外部_________干扰后,在没有飞行员_________的情况下,回到_________飞行状态的_________。
稳定性有两大类别:_________ 和 _________。
当所有力的总和为_________且所有_________的总和为零时,飞机处于_________(配平)状态。
飞机所具有的静态稳定性类型是由其在移除某些干扰力后的_________趋势定义的。
静态稳定性的三种不同类型是:
a) _________静态稳定性存在于当飞机从平衡状态被干扰并有返回平衡状态的趋势时。
b) _________静态稳定性存在于当飞机受到干扰,既没有返回的趋势,也没有继续向位移方向运动的趋势时。
c) _________静态稳定性存在于当飞机有继续沿干扰方向运动的趋势时。
纵轴从_________穿过_________到_________。
法向轴"垂直地"穿过_________,与_________轴成_________°角。
横向轴是一条穿过_________的线,平行于穿过_________尖的线。
三个参考轴都穿过_________。
横向稳定性涉及绕_________轴的运动(_________)。
纵向稳定性涉及绕_________轴的运动(_________)。
方向稳定性涉及绕_________轴的运动(_________)。
我们考虑由于攻角_________引起的升力_________变化,这种变化通过一个_________点作用;即_________。
空气动力中心(AC)位于_________%弦长位置。
在正常攻角下,绕AC的_________俯仰力矩保持_________。
单独的机翼是静态_________的,因为_________位于_________的前方。
向上的垂直阵风将暂时_________机翼的攻角。通过_________作用的_________升力大小将增加绕_________的_________俯仰力矩。这是一个_________俯仰力矩。
尾翼的位置是为了产生绕飞机_________的_________俯仰力矩。
如果尾部力矩大于机翼力矩,力矩总和将不为_________,由此产生的机头_________力矩将导致绕_________的角_________。
尾部力矩相对于机翼力矩越_________,_________ 原始位置的回归率就越_________。
通过将飞机_________向前移动,可以增加尾部力矩,这_________尾部力臂并_________机翼力臂。
如果机头向下(_________ )的尾部力矩大于机头向上(_________)的机翼力矩,飞机将具有_________纵向稳定性。
当由于干扰导致尾部力矩和机翼力矩总和的变化为零时,重心的位置被称为_________。
_________ 越靠前,绕_________的机头向下角_________就越_________——_________ 稳定性的程度就越_________。
_________ 位于_________点前方的距离将给出_________纵向稳定性的度量;这个距离被称为静态_________。
静态裕度越大,_________ 就越_________。
_________重心限制将位于_________点前方的某个距离处。
_________ 重心限制和中性点之间的距离给出了所需的最小静态稳定性_________。
如果飞机在俯仰、滚转和偏航方面的所有_________等于_________,则称其为_________。
配平(_________)是_________的功能,可以通过以下方式实现:
a) _________努力,
b) 配平_________,
c) 在机翼_________和位于后部的_________油箱之间移动_________,或
d) 表面_________的偏置(_________飞行控制)。
术语_________指的是飞机响应控制面位移并达到所需_________状态的能力。
高度的稳定性往往会降低飞机的_________。
飞机的稳定趋势同样抵抗来自_________的位移,无论是通过控制器上的_________努力(_________ 力)还是_________。
如果重心向前移动,静态纵向稳定性_________,可控性_________(操纵杆力_________)。
如果重心向后移动,静态纵向稳定性_________,可控性_________(操纵杆力_________)。
当重心在前限位置时,静态纵向稳定性_________,可控性_________,操纵杆力_________。
当重心在后限位置时,静态纵向稳定性_________,可控性_________,操纵杆力_________。
后重心限制的设定是为了确保_________程度的静态纵向稳定性。
前重心限制的设定是为了确保在最差情况下_________程度的可控性。
带有填入缺失词的关键事实1可在本章末尾找到。
静态纵向稳定性的图形表示
静态纵向稳定性取决于攻角和俯仰力矩之间的关系。有必要研究飞机每个组件对俯仰力矩的贡献。与所有其他气动力一样,绕横轴的俯仰力矩以系数形式研究。
M = C M Q S ( M A C ) M=C_{M}QS(MAC) M=CMQS(MAC)
或
C M = M Q S ( M A C ) C_{M}=\frac {M}{QS(MAC)} CM=QS(MAC)M
其中:
| 变量 | 描述 |
|---|---|
| M | 绕重心的俯仰力矩(如果方向为机头上仰则为正) |
| Q | 动压 |
| S | 机翼面积 |
| MAC | 平均空气动力弦长 |
| C M C_{M} CM | 俯仰力矩系数 |
飞机各个组件贡献的俯仰力矩系数被加总并相对于升力系数(攻角)绘制成图。
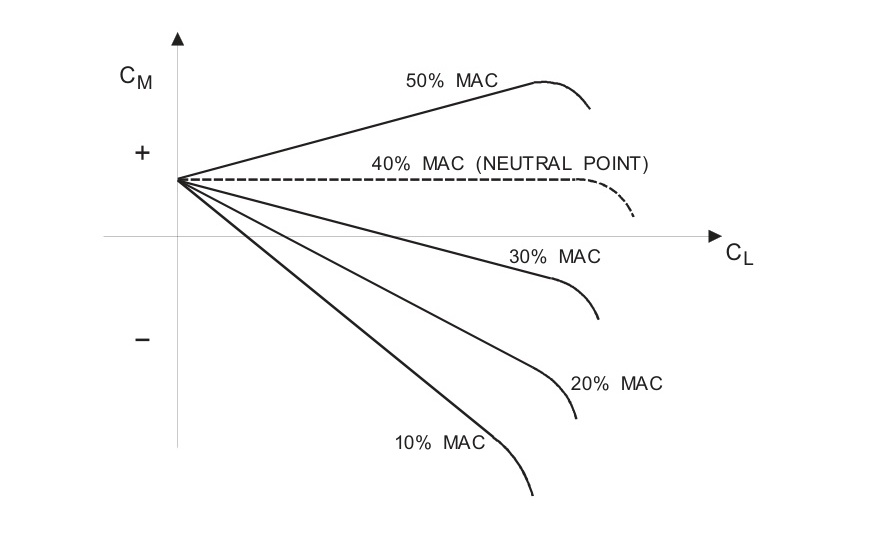
研究 C M \mathrm {C}_{\mathrm {M}} CM与 C L \mathrm {C}_{\mathrm {L}} CL之间关系的图表是理解飞机静态纵向稳定性的便捷方式。
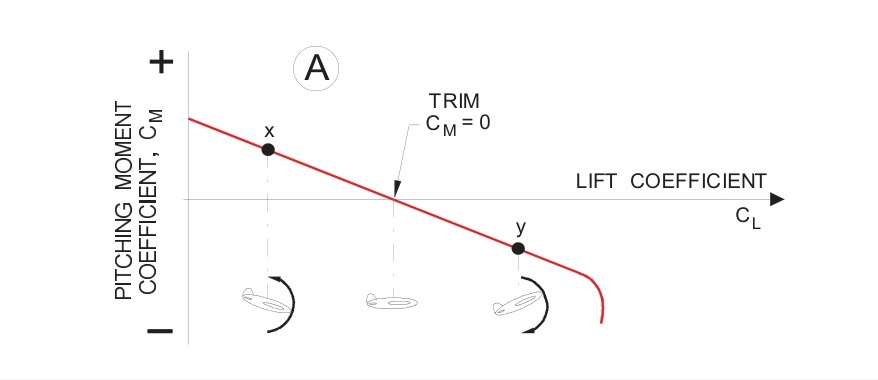
图表A展示了具有正静态纵向稳定性的飞机的俯仰力矩系数( C M C_{M} CM)与升力系数( C L C_L CL)的变化关系。静态稳定性的证据表现为飞机在受到扰动后有返回平衡或"配平"状态的趋势。图表A所描述的飞机在 C M = 0 C_{M}=0 CM=0时处于配平或平衡状态,如果飞机被扰动到某个不同的 C L ′ C_{L'} CL′,产生的俯仰力矩变化会使飞机返回配平点。如果飞机被扰动到较高的 C L C_{L} CL(点y),会产生负的或机头向下的俯仰力矩,这种力矩倾向于使攻角减小回到配平点。如果飞机被扰动到较低的 C L \mathrm {C}_{\mathrm {L}} CL(点x),会产生正的或机头上仰的俯仰力矩,这种力矩倾向于使攻角增加回到配平点。因此,正静态纵向稳定性表现为 C M C_{M} CM对 C L C_L CL的负斜率。静态纵向稳定性的程度由曲线的斜率(红线)表示。
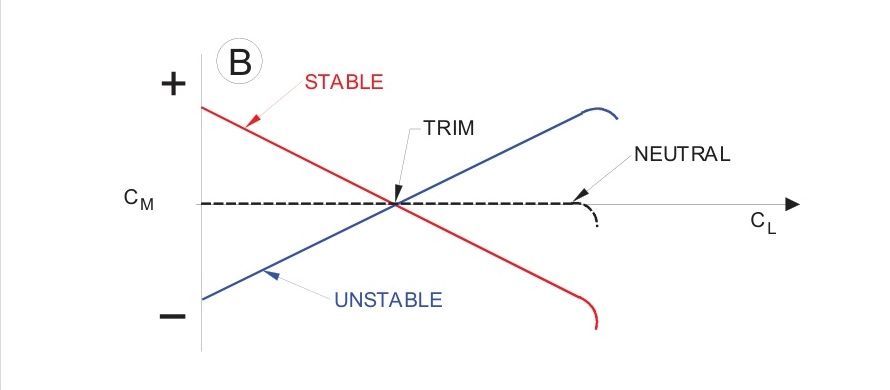
图表B比较了稳定和不稳定状态。正静态稳定性由具有负斜率的红色曲线表示。如果曲线斜率为零,则表示中性静态稳定性。如果存在中性稳定性,飞机可能被扰动到较高或较低的升力系数而不会改变俯仰力矩系数。
这种情况表明飞机没有返回原始平衡状态的趋势,也不会保持配平。表现出 C M C_{M} CM对 C L C_{L} CL曲线正斜率(蓝线)的飞机将是不稳定的。如果不稳定的飞机在配平点受到任何扰动,俯仰力矩的变化只会放大这种扰动。当不稳定的飞机被扰动到较高的 C L C_{L} CL时, C M \mathrm {C}_{\mathrm {M}} CM会发生正向变化,表明有继续更大位移的趋势。当不稳定的飞机被扰动到较低的 C L C_{L} CL时, C M \mathrm {C}_{\mathrm {M}} CM会发生负向变化,倾向于产生持续的位移。
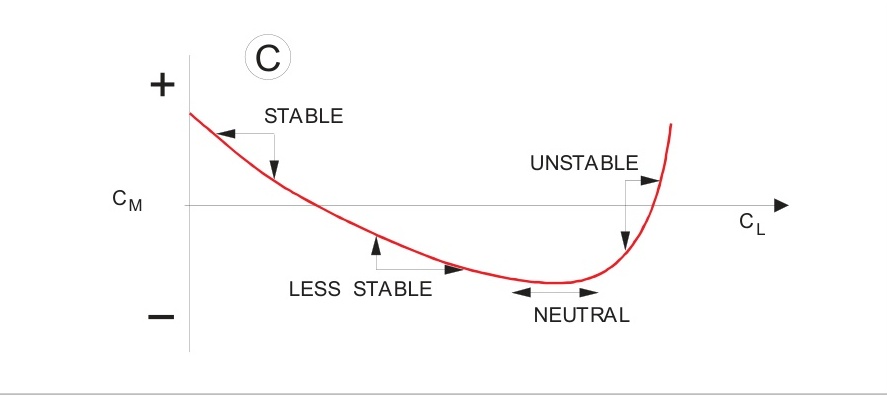
通常,传统飞机构型的静态纵向稳定性不会随升力系数变化。换句话说, C M \mathrm {C}_{\mathrm {M}} CM对 C L C_{L} CL的斜率不会随 C L C_{L} CL变化。然而,如果:
-
飞机有后掠翼,
-
存在"动力效应"对稳定性的重大贡献,或
-
水平尾翼处的下洗有显著变化,
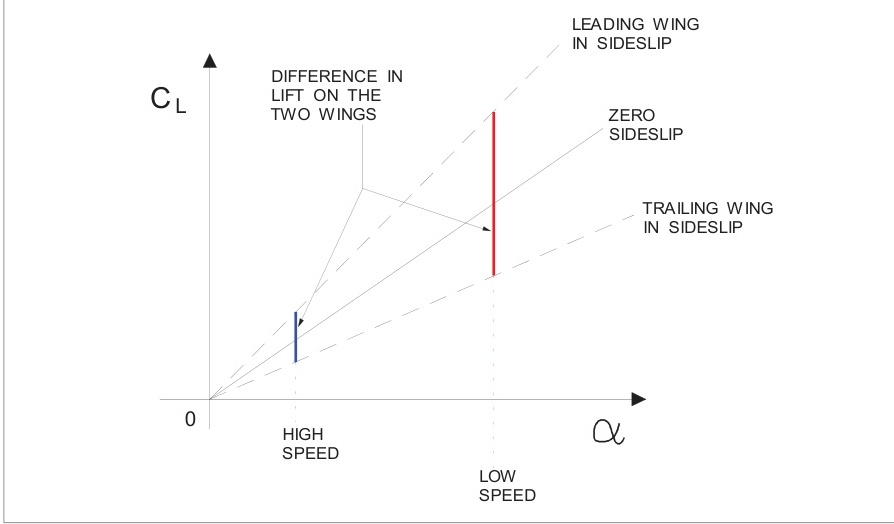
在高升力系数(低速)时可能会出现明显的静态稳定性变化。这种情况在图表C中有所说明。该图中 C M C_{M} CM对 C L \mathrm {C}_{\mathrm {L}} CL的曲线在低 C L \mathrm {C}_{\mathrm {L}} CL值(高速)时显示出良好的稳定斜率。随着 C L \mathrm {C}_{\mathrm {L}} CL增加,负斜率略有减小,因此稳定性降低。随着 C L ′ C_{L'} CL′继续增加,斜率变为零,出现中性稳定性。最终,斜率变为正值,飞机变得不稳定或出现"俯仰上仰"现象。
请记住,在任何升力系数下,飞机的静态稳定性都由 C M \mathrm {C}_{\mathrm {M}} CM对 C L C_{L} CL曲线的斜率表示。
组成部件表面的贡献
绕横轴的净俯仰力矩是由各个组成部件在其适当流场中作用的贡献所致。
通过研究每个组件的贡献,可以理解它们对静态稳定性的影响。需要回顾俯仰力矩系数的定义:
C M = M Q S ( M A C ) \mathrm {C}_{\mathrm {M}}=\frac {\mathrm {M}}{\mathrm {Q}\mathrm {S}(\mathrm {MAC})} CM=QS(MAC)M
因此,任何俯仰力矩系数( C M C_{M} CM)——无论来源如何——都有共同的分母:动压(Q)、机翼面积(S)和机翼平均空气动力弦长(MAC)。这个共同分母适用于以下部件贡献的俯仰力矩:
-
机身和发动机短舱,
-
水平尾翼,以及
-
动力效应,以及机翼贡献的俯仰力矩。
机翼
机翼对稳定性的贡献主要取决于空气动力中心(AC)相对于飞机重心的位置。通常,空气动力中心被定义为机翼平均空气动力弦(MAC)上的一点,在该点处机翼俯仰力矩系数不随升力系数变化。所有升力系数的变化实际上都发生在机翼空气动力中心。因此,如果机翼经历某些升力系数的变化,产生的俯仰力矩将直接取决于AC和CG的相对位置。
注意:机翼的正弯度程度对纵向稳定性没有影响。无论攻角如何,绕AC的俯仰力矩始终为负。
稳定性由恢复力矩的产生来实现。由于机翼AC在CG前方,机翼对飞机贡献了不稳定的俯仰力矩,如图10.19所示。
由于机翼是飞机的主要空气动力表面,机翼贡献的任何变化都可能对飞机稳定性产生显著影响。
机身和发动机短舱
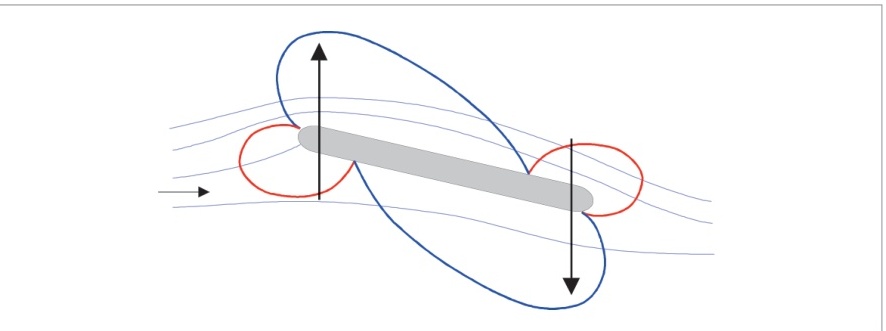
在大多数情况下,机身和发动机短舱的贡献是不稳定的。对称体在气流中处于攻角状态时会产生不稳定的俯仰力矩。实际上,攻角增加会导致不稳定俯仰力矩增加,而不会产生升力。图10.20说明了在机身上产生这种不稳定力矩的压力分布。攻角增加导致不稳定俯仰力矩增加,但升力增加可忽略不计。
水平尾翼
水平尾翼通常提供飞机所有组件中最大的稳定影响。
要理解水平尾翼对稳定性的贡献,请观察图10.21。如果飞机攻角增加(由于阵风或控制面偏转),尾翼在其空气动力中心处的升力将增加。水平尾翼升力的增加会在飞机CG处产生负的(稳定的)力矩。
对于给定的垂直阵风速度和飞机真空速,机翼力矩基本上由CG位置决定。但是,尾翼力矩由CG位置和尾翼的有效性决定。对于给定的力矩臂(CG位置),尾翼的有效性取决于:
-
来自机翼的下洗。
-
尾翼处的动压。
-
纵向二面角。
下面将讨论来自机翼的下洗和尾翼处的动压,但纵向二面角的效果如下所示。
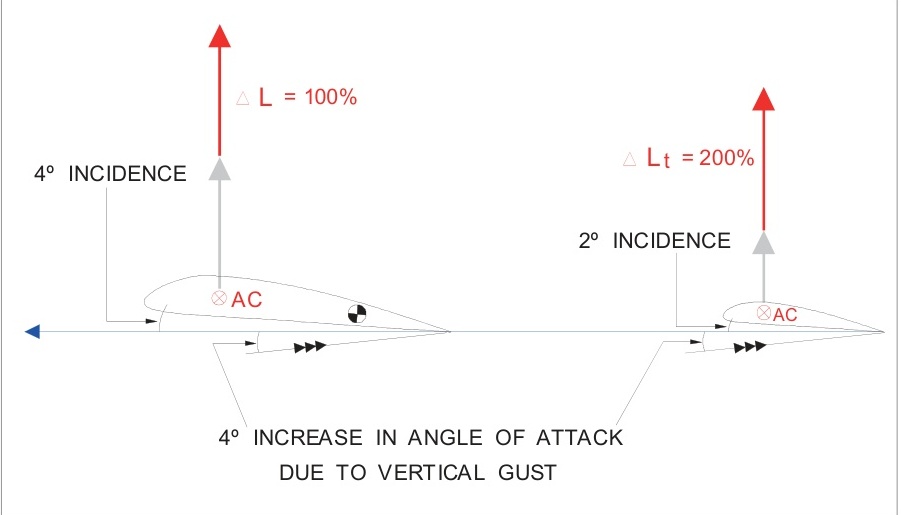
纵向二面角
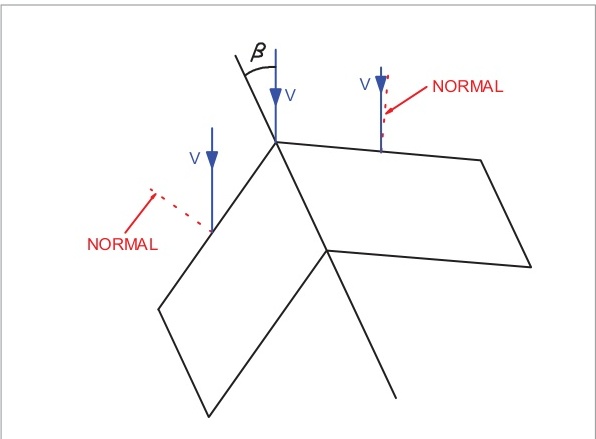
这是尾翼和机翼安装角之间的差异。为了纵向静态稳定性,尾翼安装角较小。如图10.22所示,这将使尾翼升力的百分比增加大于机翼升力的百分比增加,对于给定的垂直阵风。
这保证了尾翼对静态纵向稳定性的正贡献足以克服飞机其他组件的不稳定力矩总和。
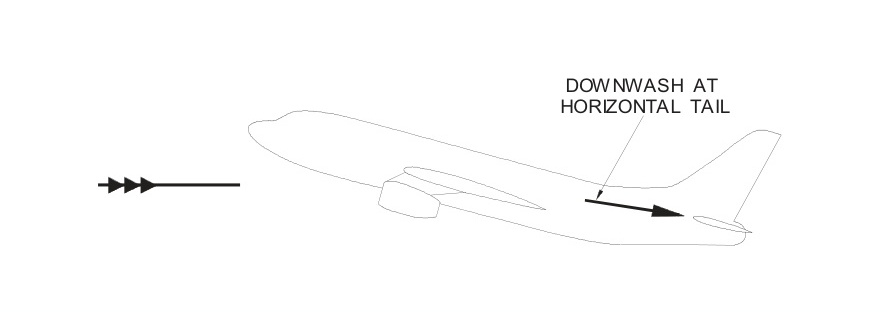
下洗
应该理解,水平尾翼处的气流方向或动压与自由流不同。由于机翼尾流、机身边界层和动力效应,水平尾翼处的动压可能与自由流的动压大不相同。在大多数情况下,尾翼处的动压通常较小,这降低了尾翼的效率。
当飞机攻角发生变化时,水平尾翼不会经历与机翼相同的攻角变化,如图10.23所示。
由于机翼后方下洗的增加,水平尾翼将经历较小的攻角变化,例如,如果机翼攻角变化10°导致水平尾翼处下洗增加4°,则水平尾翼只经历6°的攻角变化。这样,水平尾翼处的下洗减少了对稳定性的贡献。
任何改变水平尾翼处下洗变化率的因素(例如襟翼或螺旋桨滑流)都将直接影响尾翼贡献和飞机稳定性。下洗降低了静态纵向稳定性。
无动力稳定性
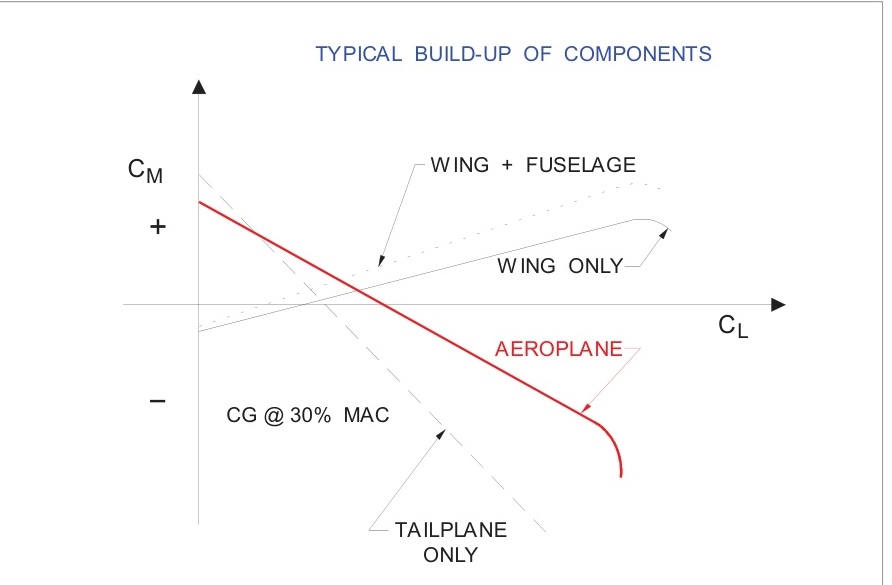
当关注构型的空气动力稳定性时,忽略动力效应,通过组成部件的贡献累加来考虑稳定性。
图10.24说明了传统飞机构型组件的典型累加。如果CG任意设置在30%MAC处,仅机翼的贡献是不稳定的,如 C M C_{M} CM对 C L C_{L} CL的正斜率所示。机翼和机身的组合增加了不稳定性。单独尾翼的贡献由于曲线的大负斜率而具有高度稳定性。尾翼的贡献必须足够稳定,以便完整构型在预期的CG位置表现出正静态稳定性。
CG位置的影响
CG位置的变化可能导致静态纵向稳定性的巨大变化。在传统飞机构型中,CG变化导致的稳定性大变化主要是由于机翼贡献的巨大变化。如果所有表面的安装角保持固定,CG位置对静态纵向稳定性的影响如图10.25所示。随着CG逐渐向后移动,飞机静态稳定性降低,然后变为中性,最后变为不稳定。产生零斜率和中性静态稳定性的CG位置被称为"中性点"。中性点可以被想象为整个飞机构型的有效空气动力中心,即当CG位于中性点时,所有净升力的变化实际上都发生在该点,不会产生俯仰力矩变化。中性点定义了没有静态不稳定性的最后CG位置。
动力效应
动力效应可能导致配平升力系数和静态纵向稳定性的显著变化。由于对稳定性的贡献是通过力矩系数的变化来评估的,动力效应在飞机以高功率和低空速运行时(如进近和起飞期间)最为显著。
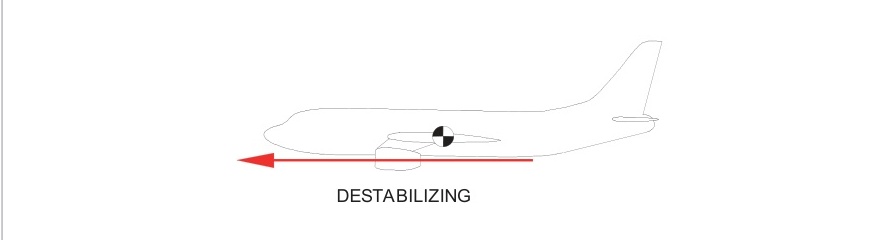
动力效应分为两大类。首先是由推进单元产生的力直接产生的效应。其次是滑流和其他相关流动改变空气动力表面的力和力矩的间接效应。图10.26说明了动力的直接效应。推力线的垂直位置定义了对稳定性的直接贡献之一。如图所示,如果推力线在CG下方,推力增加将产生正的或机头上仰的力矩,这种效应是不稳定的。
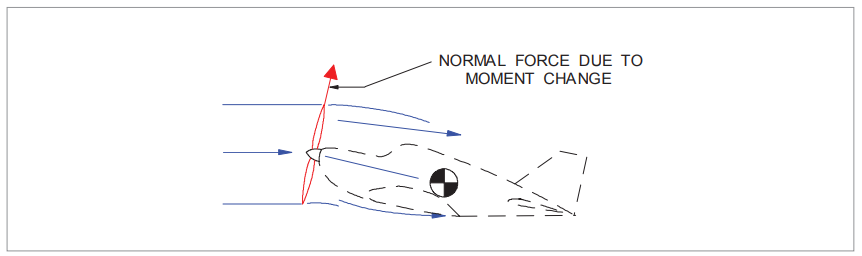
位于CG前方的螺旋桨贡献了不稳定效应。如图10.27所示,相对于相对气流倾斜的旋转螺旋桨导致气流偏转。滑流的动量变化在螺旋桨平面产生法向力。由于这种法向力会随着飞机攻角的增加而增加,当螺旋桨在CG前方时,这种效应将是不稳定的。不稳定贡献的大小取决于从CG到螺旋桨的距离,在高功率和低动压时最大。
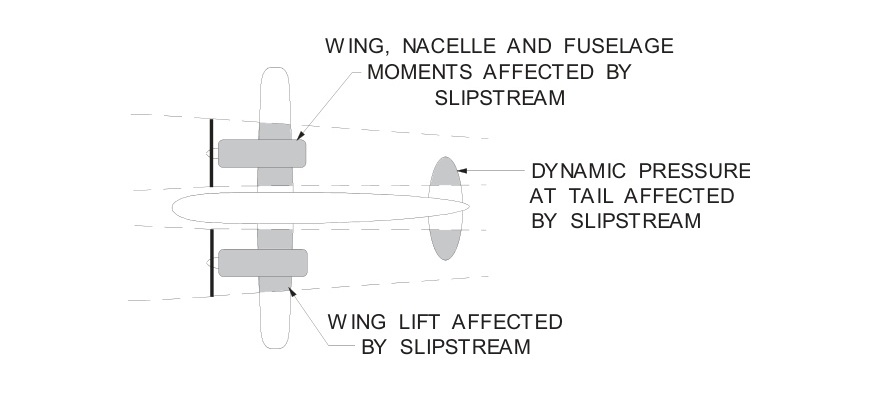
动力的间接效应在螺旋桨驱动的飞机中比在喷气式飞机中更为重要。如图10.28所示,螺旋桨驱动的飞机在各种表面上产生的滑流速度与无动力飞行状态的流场不同。由于各种机翼、短舱和机身表面部分或全部浸没在这种滑流中,这些组件对稳定性的贡献可能与无动力飞行状态大不相同。通常,机身和短舱贡献随动力的变化相对较小。浸没在滑流中的机翼部分的额外升力要求飞机在较低的攻角下运行以产生相同的有效升力系数。一般来说,为了达到相同 C L C_{L} CL而减小攻角会减少尾翼对稳定性的贡献。然而,尾翼处动压的增加倾向于增加尾翼的有效性,可能是一种稳定效应。由于尾翼上滑流速度而产生的这种贡献的大小将取决于CG位置和配平升力系数。
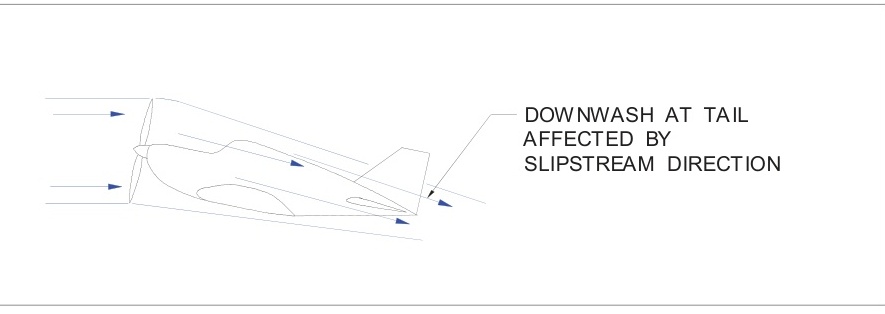
图10.29所示的螺旋桨处法向力导致的滑流偏转倾向于增加水平尾翼处的下洗并减少对稳定性的贡献。
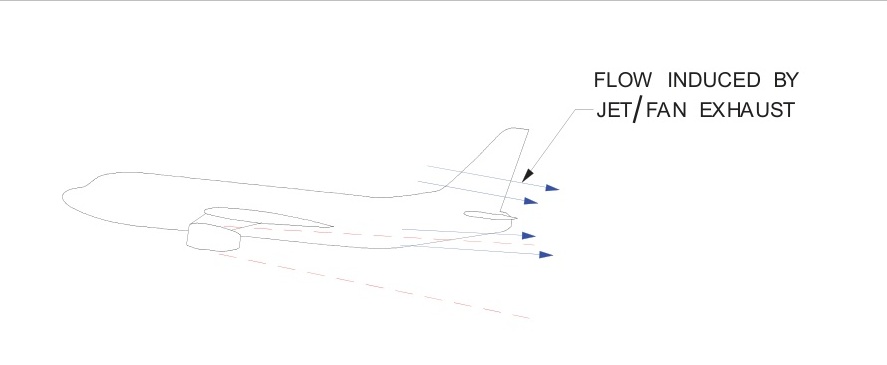
涡轮喷气/风扇发动机排气处的诱导流动产生了基本相同的不稳定效应,如图10.30所示。通常,喷气式飞机水平尾翼处的诱导流动很小,当喷气流经过水平尾翼下方时会产生不稳定效应。动力对稳定性的间接效应的大小在高 C L ′ C_{L'} CL′、高功率和低飞行速度时往往最大。
稳定性和控制
动力效应的结论
直接和间接动力效应的综合导致在高功率、高 C L C_{L} CL和低动压时静态稳定性普遍降低。一般来说,任何飞机在这些条件下都会经历最低水平的静态纵向稳定性。由于直接和间接动力效应的幅度更大,螺旋桨驱动的飞机通常比喷气式飞机经历更大的影响。
高升力装置
对稳定性的另一个影响可能来自高升力装置的展开。高升力装置倾向于增加尾翼处的下洗并减少尾翼处的动压,这两者都是不稳定的。然而,高升力装置可能防止机翼在高 C L C_L CL时的不稳定贡献。虽然高升力装置的影响取决于飞机构型,但通常的影响是不稳定的。因此,飞机在动力进近或复飞/中断进近期间可能经历最关键的前中性点。在这种飞行状态下,静态稳定性通常最弱,必须特别注意对飞机的精确控制。
动力开启中性点可能设定CG位置的最后限制。
控制力稳定性
飞机的静态纵向稳定性定义为在受到扰动后返回平衡的趋势。换句话说,稳定的飞机会抵抗偏离配平或平衡的扰动。飞机的控制力应反映飞机的稳定性,并为飞行员提供适当的参考,以精确控制飞机。
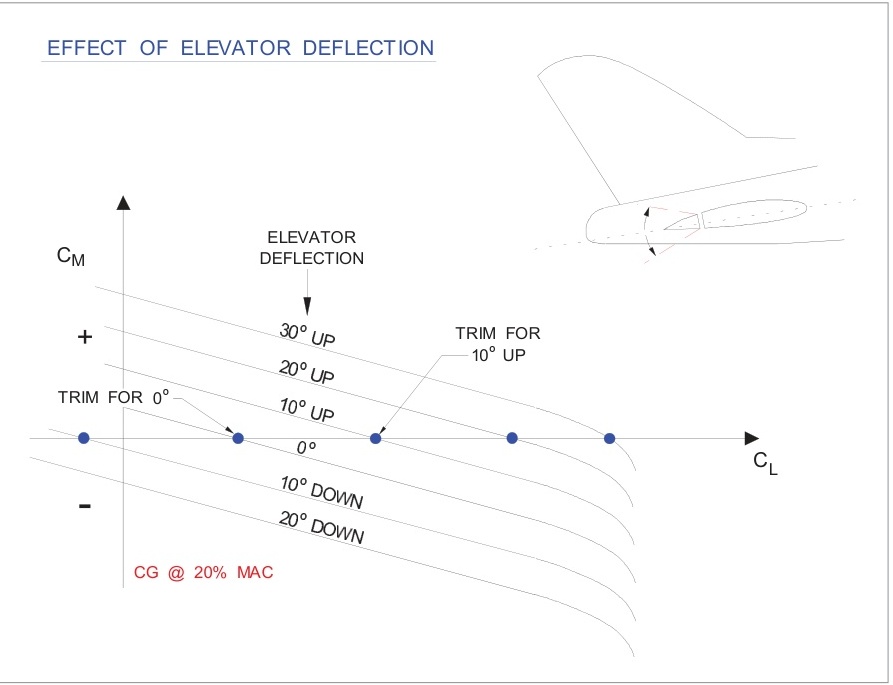
图10.31的图表说明了升降舵偏转对俯仰力矩的影响。如果飞机的升降舵保持在零偏转, C M \mathrm {C}_{\mathrm {M}} CM对 C L C_{L} CL的 0 ∘ 0^{\circ} 0∘线描述了静态稳定性和配平升力系数。如果升降舵保持在 1 0 ∘ 10^{\circ} 10∘上偏(飞机在较低速度配平),飞机的静态稳定性不变,但配平升力系数增加。
当升降舵保持在各种位置时,平衡(配平)将在各种升力系数下发生,配平 C L C_L CL可以与升降舵偏转相关联,如图10.32所示。
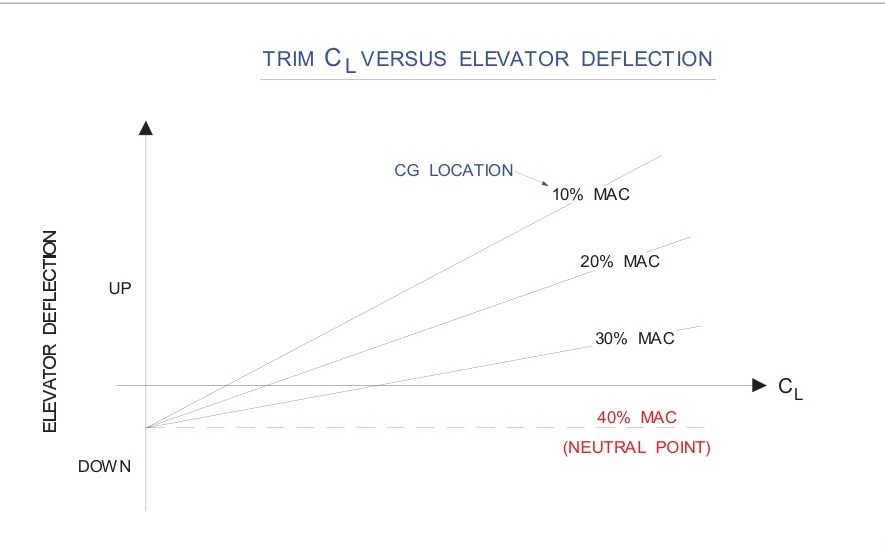
当飞机的CG位置固定时,每个升降舵位置对应一个特定的配平升力系数。随着CG向后移动,这条线的斜率减小,稳定性的降低表现为给定的控制偏转导致配平升力系数更大的变化。这证明稳定性降低导致可控性增加,当然,稳定性增加会降低可控性。
如果CG向后移动,直到配平 C L \mathrm {C}_{\mathrm {L}} CL对升降舵偏转的线具有零斜率,则获得中性静态稳定性。
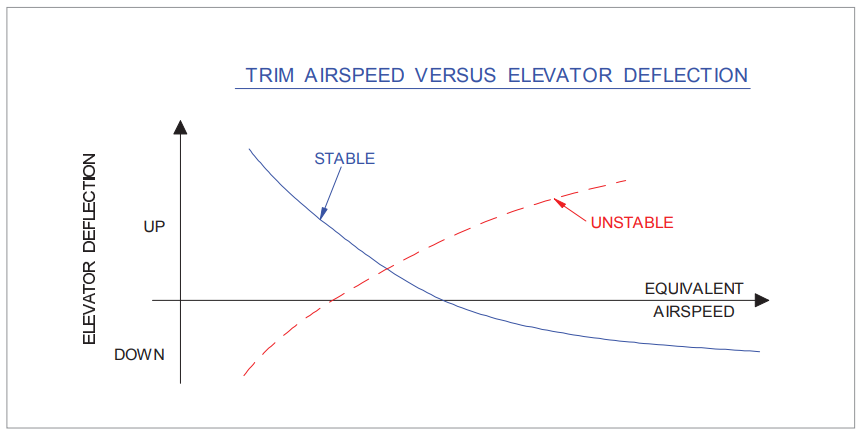
由于每个升力系数值对应于支持飞机水平飞行所需的特定动压值,配平空速可以与升降舵偏转相关联,如图10.33所示。
如果CG位置在中性点前方,且控制位置与表面偏转直接相关,飞机将表现出操纵杆位置稳定性。换句话说,飞机将要求操纵杆向后移动以增加攻角并在较低空速配平,向前移动以减小攻角并在较高空速配平。
飞机表现出这一特性是非常理想的。如果飞机具有操纵杆位置不稳定性,飞机将要求操纵杆向后移动以在较高空速配平,或向前移动以在较低空速配平。
有一个力的增量取决于配平片设置,它随动压或等效空速的平方而变化。图10.34表示操纵杆力随空速的变化,并说明了配平片设置对操纵杆力的影响。
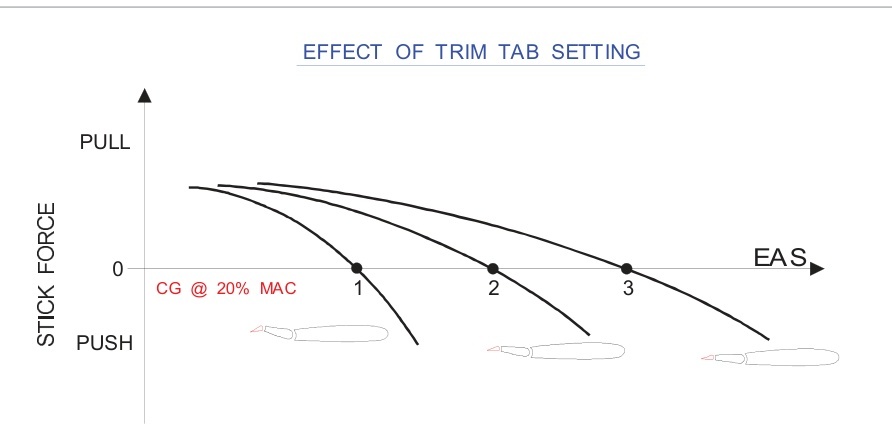
为了在点(1)配平飞机,需要一定量的上升降舵,使用配平片可以获得零操纵杆力。要将飞机配平到对应点(2)和(3)的更高速度,需要越来越少的飞机机头上仰配平片。
注意,当飞机正确配平时,需要推力来增加空速,需要拉力来减小空速。这样,飞机将具有正操纵杆力稳定性,对空速有稳定的"感觉"。
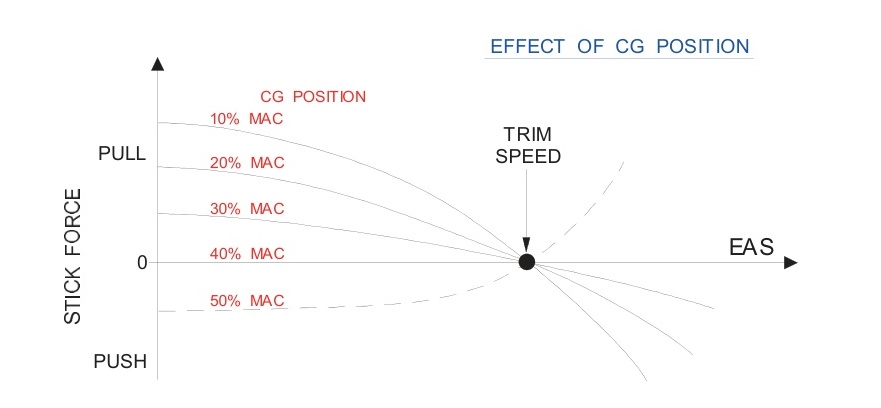
如果在保持恒定空速配平的同时改变飞机的CG,就可以理解CG位置对操纵杆力稳定性的影响。如图10.35所示,将CG向后移动会减小通过配平速度的操纵杆力线的斜率。因此,在减小的操纵杆力稳定性下,明显需要较小的操纵杆力来使飞机偏离配平速度。当操纵杆力梯度(或斜率)变为零时,CG位于中性点,存在中性稳定性。如果CG在中性点后方,将存在操纵杆力不稳定性,例如,飞机在较低速度时需要推力,或在较高速度时需要拉力。应该注意的是,操纵杆力梯度在低空速时较低,当飞机处于低速和高功率状态,且CG位置接近后限位置时,对空速的"感觉"将很弱。
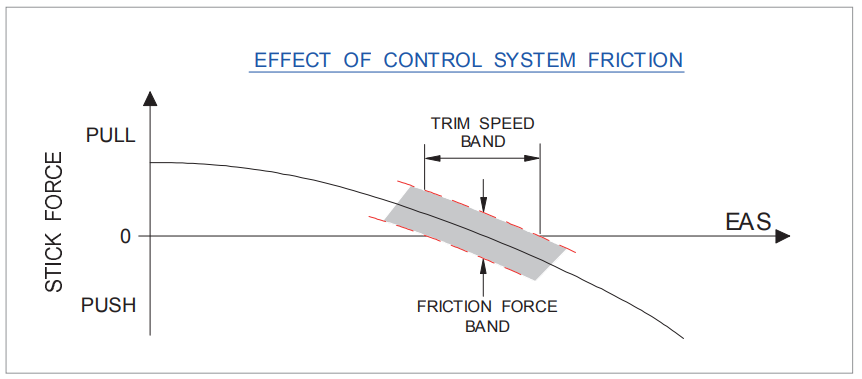
控制系统摩擦可能对控制力产生非常不良的影响。图10.36说明了控制力与空速的关系是一个带状区域而非一条线。宽摩擦力带可以在操纵杆力稳定性较低时完全掩盖操纵杆力稳定性。现代飞行控制系统需要精确维护以最小化摩擦力带并保持飞机适当的感觉。
机动稳定性
当飞行员使飞机俯仰时,飞机绕重心旋转,尾翼受到俯仰速度的影响,在这个例子中,向下。由于机动飞行中的俯仰速度,飞机的纵向稳定性略大于稳定飞行条件下的稳定性。
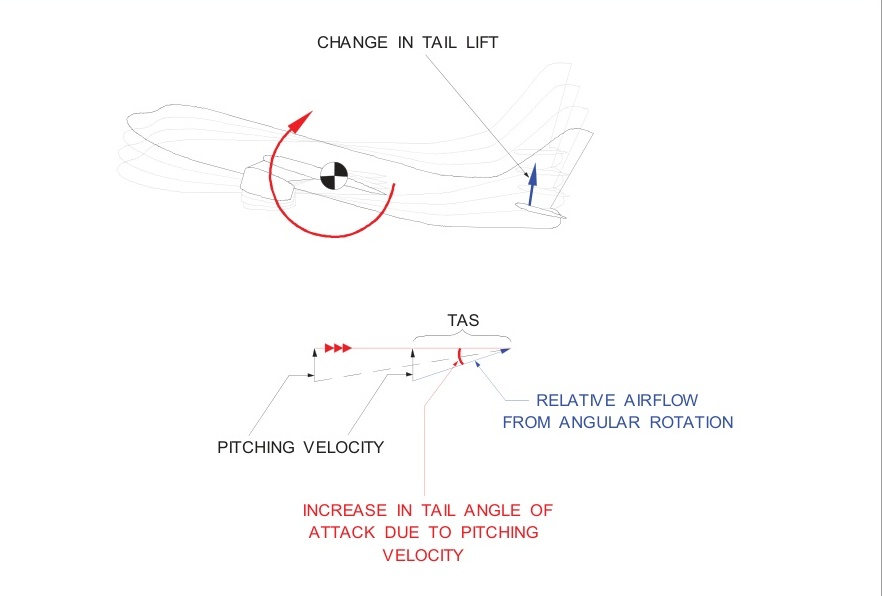
图10.37显示,尾翼由于其向下的俯仰速度而经历向上的气流分量。这个垂直分量与真空速(TAS)的矢量相加,导致尾部有效攻角增加,产生尾部升力增加,抵抗机头上仰俯仰位移。
由于负俯仰力矩抵抗机头上仰俯仰位移,但是由于机头上仰俯仰运动而产生,这种效应是俯仰阻尼(空气动力阻尼)。
可以看出,在给定俯仰速度下,真空速增加会减小由俯仰速度引起的攻角。
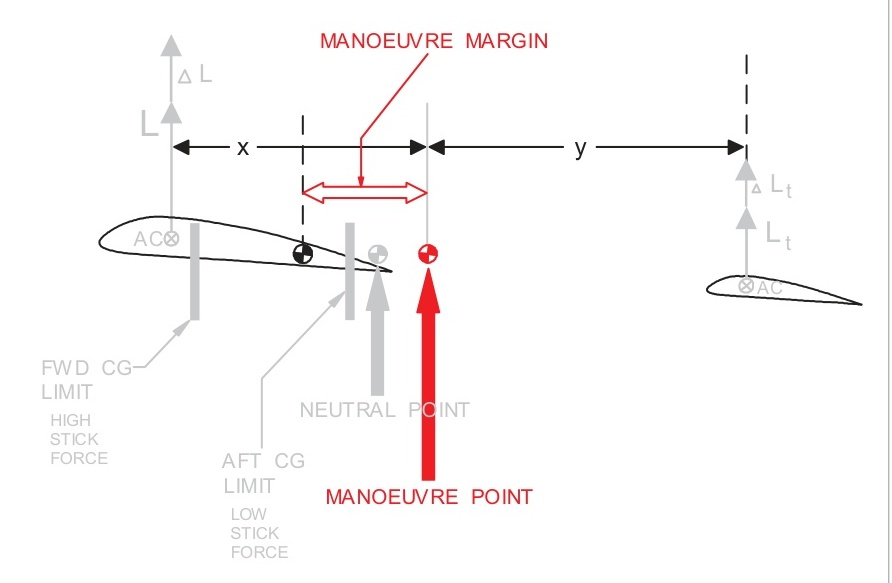
空气动力阻尼产生的俯仰力矩将在机动中提供比稳定飞行中更大的稳定性。当机动过程中尾部力矩与机翼力矩相同时的重心位置被称为机动点,这个"中性点"将比1g飞行时更靠后,如图10.38所示。
在大多数情况下,机动点不会是一个关键项目;如果飞机在1g飞行中表现出静态稳定性,它在机动飞行中肯定会有稳定性。
每"g"操纵杆力
对飞机机动稳定性最直接的认识是通过操纵杆力与载荷系数的关系图,如图10.39所示。具有正机动稳定性的飞机应该表现为随着载荷系数或"g"的增加,操纵杆力稳定增加。机动操纵杆力梯度——或每"g"操纵杆力——必须为正,但应该有适当的大小。操纵杆力梯度不能过高,否则飞机将难以操纵且令人疲劳。同样,操纵杆力梯度也不能太低,否则当控制力较轻时,飞机可能会无意中超载。
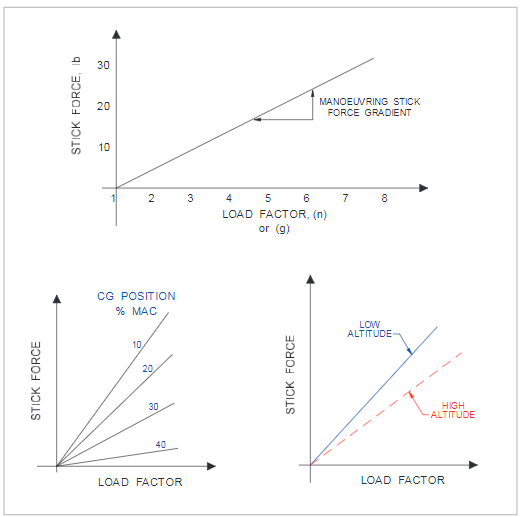
当飞机具有高静态稳定性时,机动稳定性将很高,并会产生高操纵杆力梯度,如图10.39所示。前重心限制可能会被设定为防止过高的机动操纵杆力梯度。随着重心向后移动,操纵杆力梯度随着机动稳定性的降低而减小,可能会达到操纵杆力梯度的下限。
当被要求计算"每g操纵杆力"时,记住飞机开始时处于1g状态。因此,在除以拉力之前,必须从"g"限制中减去1g。
飞机的俯仰阻尼与空气密度有关。在高空,高真空速减少了给定俯仰速度下尾部攻角的变化,减少了俯仰阻尼。因此,随着高度增加,可以预期机动操纵杆力稳定性会降低。
调整控制力
控制力应该反映飞机的稳定性,但同时应该具有可容忍的大小。手动飞行控制系统可能采用各种各样的技术,以在飞机的速度、重心和高度范围内提供令人满意的控制力。
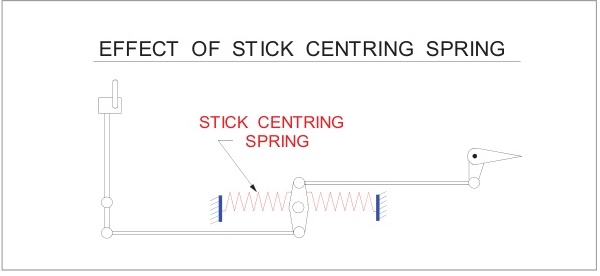
操纵杆中心弹簧
如果在控制系统中添加如图10.40所示的弹簧,它将使操纵杆居中并提供取决于操纵杆位移的力增量。
当控制系统在操纵杆位置和舵面偏转之间有固定传动比时,中心弹簧将根据操纵杆位置对操纵杆力稳定性做出贡献。
对操纵杆力稳定性的贡献在低飞行速度时最大,因为需要相对较大的控制偏转。在高空速时贡献最小,因为所需的控制偏转较小。因此,操纵杆中心弹簧将增加空速和机动操纵杆力稳定性,但在高空速时贡献减小。
这种装置的一种变体是弹簧刚度随动压变化而控制(Q-感觉)。在这种情况下,弹簧对操纵杆力稳定性的贡献不会随速度减小。
下压弹簧
添加到控制系统中的下压弹簧是增加空速操纵杆力稳定性而不改变飞机静态稳定性的一种方法。
如图10.41所示,下压弹簧由连接到控制系统的一个预加载长弹簧组成,它倾向于使升降舵向下旋转(飞机机头向下)。下压弹簧的效果是提供一个与控制偏转或空速无关的拉力增量。
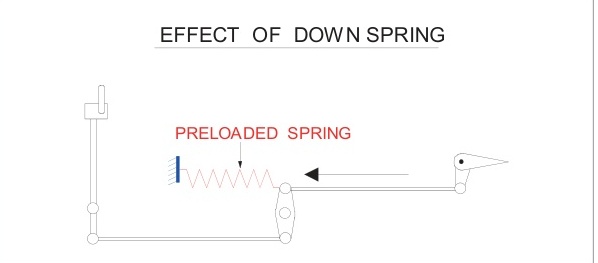
当下压弹簧添加到飞机的控制系统中,并且飞机重新配平到原始速度时,空速操纵杆力梯度增加,对空速的感觉更强。下压弹簧将为空速操纵杆力稳定性不足的飞机提供"合成"改进。由于下压弹簧的力增量不受操纵杆位置或正常加速度的影响,机动操纵杆力稳定性将保持不变。
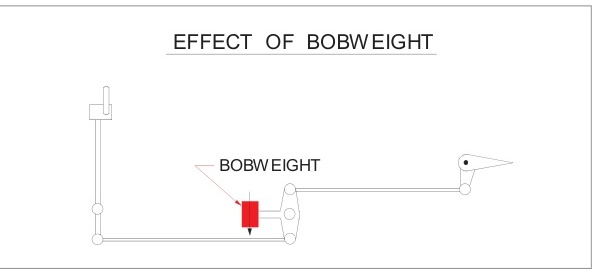
重锤
重锤是改善操纵杆力稳定性的有效装置。如图10.42所示,重锤由连接到控制系统的偏心质量组成,在非加速飞行中,它提供与下压弹簧相同的拉力增量。实际上,添加到飞机控制系统的重锤产生的效果与下压弹簧相同。重锤将增加空速操纵杆力梯度并增加对空速的感觉。
重锤还对机动操纵杆力梯度有影响,因为重锤质量受到与飞机相同的加速度。因此,重锤将提供与飞机机动加速度(施加的载荷系数)成正比的操纵杆力增量。这将防止飞行员在机动中施加过多的"g";你拉得越多,重锤对控制系统的阻力就越大。
纵向控制
要令人满意,飞机必须具有足够的可控性和足够的稳定性。具有高静态纵向稳定性的飞机将表现出对平衡位移的极大阻力。因此,可控性的最关键条件将发生在飞机具有高静态稳定性时,即可控性的下限将设定静态稳定性的上限(前重心限制)。
有三种主要的飞行条件对纵向控制力提出关键要求(机动、起飞和着陆)。这些条件中的任何一个或组合都可以确定整体纵向控制力并设定前重心位置的限制。
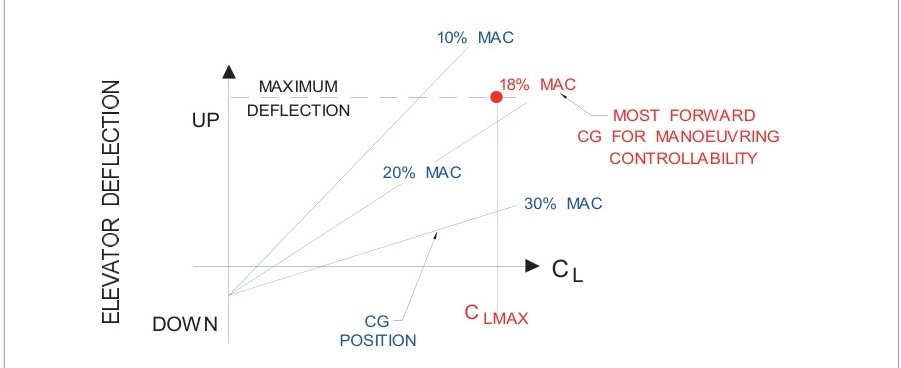
机动控制要求
飞机应该有足够的纵向控制力在机动中达到最大可用升力系数或限制载荷系数。如图10.43所示,重心向前移动增加了飞机的纵向稳定性,需要更大的控制偏转来产生配平升力系数的变化。对于所示的例子,当重心位置在平均空气动力弦(MAC)18%以前时,升降舵的最大有效偏转不能在CLMAX处配平飞机。
这种特定的控制要求对于超音速飞行的飞机可能是最关键的。超音速飞行通常伴随着静态纵向稳定性的大幅增加(由于压力中心向后移动)和控制面效能的降低。为了应对这些趋势,必须使用强大的全动舵面在超音速飞行中达到限制载荷系数或最大可用CL。这一要求非常重要,一旦满足,超音速构型通常对所有其他飞行条件都有足够的纵向控制力。
起飞控制要求
在起飞时,飞机必须有足够的升降舵控制力在达到起飞速度前采取起飞姿态。
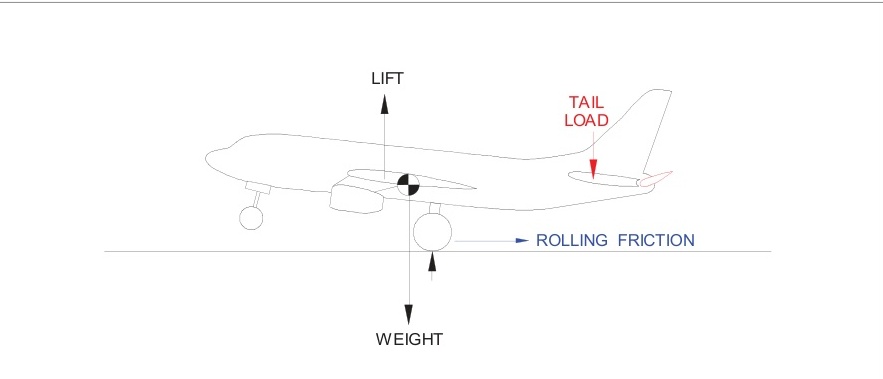
图10.44说明了飞机在起飞滑跑期间作用的主要力。当飞机处于三点姿态,速度低于失速速度时,机翼升力将小于飞机重量。由于升降舵必须能够将飞机旋转到起飞姿态,关键条件将是前轮无载荷,升力与重量的净差由主起落架支撑。
由主起落架正常力产生的滚动摩擦会产生不利的机头向下力矩。此外,位于主起落架前方的重心也会产生机头向下力矩。为了平衡这两个机头向下力矩,水平尾翼必须能够产生足够大的机头向上力矩,以在指定速度下达到起飞姿态。
起飞功率下的螺旋桨飞机可能在水平尾翼处引起相当大的滑流速度,这可以提高舵面的效率。喷气飞机不会经历类似程度的这种效应,因为喷气引起的诱导速度相对于螺旋桨的滑流速度较小。
着陆控制要求
在着陆时,飞机必须有足够的控制力以确保在指定着陆速度下的充分控制。最关键的要求将存在于重心处于最前位置、襟翼完全展开且功率设置为怠速时。这种配置将提供最稳定的条件,对可控性要求最高。
着陆控制要求与自由飞行的机动控制要求有一个特殊区别。当飞机接近地面时,由于地面效应,飞机上的三维流动将发生变化。靠近地面的机翼将经历翼尖涡流和下洗在给定升力系数下的减少。尾部下洗的减少倾向于增加静态稳定性,并由于尾部下载减少而产生机头向下力矩。因此,刚离开跑道表面的飞机,如图10.45所示,将需要额外的控制偏转以在给定升力系数下配平,着陆控制要求可能在纵向控制力设计中至关重要。
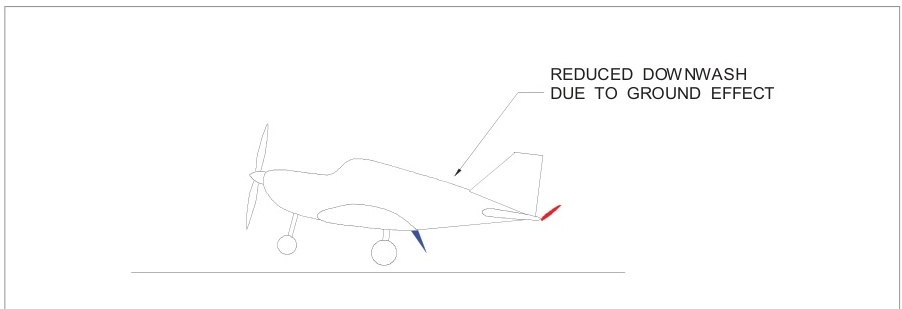
作为地面效应的一个例子,典型的螺旋桨动力飞机可能需要比自由飞行多达15°的上升降舵才能在地面效应中的CLMAX处配平。
在某些情况下,升降舵的有效性会受到配平片使用的不利影响。如果在配平操纵杆力时过度使用配平,升降舵的有效性可能会降低,这将阻碍着陆或起飞控制。
需要足够纵向控制的三个主要条件中的每一个对高静态稳定性都是关键的。如果超过前重心限制,飞机可能会在这些条件中的任何一个中遇到可控性不足的问题。
动态稳定性
静态稳定性关注飞机返回平衡的初始趋势,而动态稳定性则由随时间变化的运动定义。如果飞机从平衡状态被扰动,随后运动的时间历史表明其动态稳定性。一般来说,如果运动幅度随时间减小,飞机将表现出正动态稳定性。可能的动态行为的各种条件在以下六个时间历史图中说明。图A、B和C中所示的非振荡模式描述了没有周期性运动的可能时间历史。
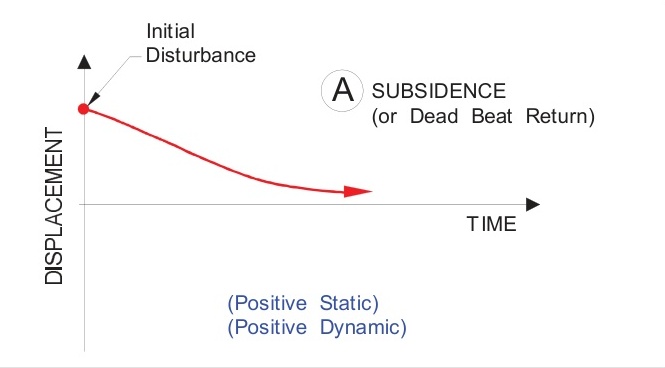
图表A说明了一个系统,它被给予初始扰动,运动简单地减弱而没有振荡;这种模式被称为"衰减"或"无超调回归"。这种运动通过初始返回平衡的趋势表明正静态稳定性,并且由于幅度随时间减小而表明正动态稳定性。
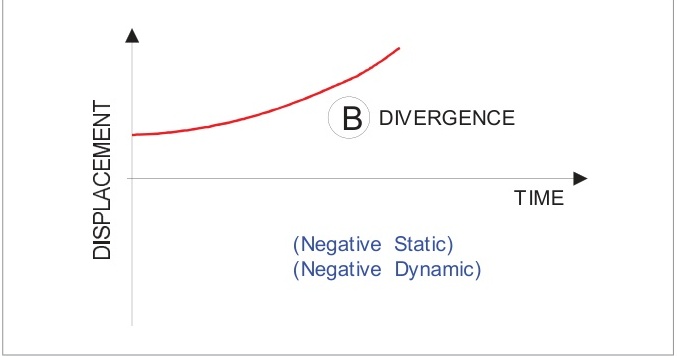
图表B通过幅度随时间非周期性增加说明了"发散"模式。继续向位移方向的初始趋势是静态不稳定性的证据,而增加的幅度是动态不稳定性的证明。
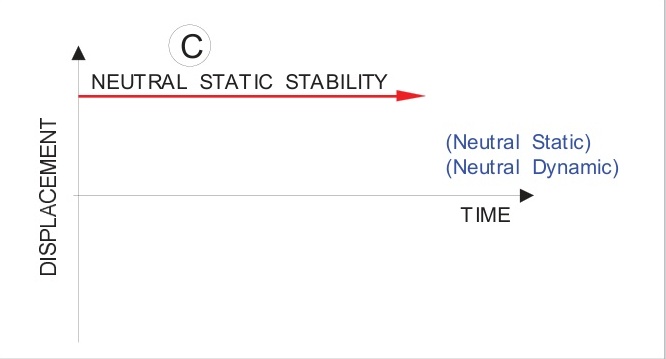
图表C说明了纯中性稳定性的模式。如果原始扰动创造了一个然后保持恒定的位移,运动趋势的缺乏和恒定幅度表明中性静态和中性动态稳定性。
图表D、E和F中所示的振荡模式描述了周期性运动可能的时间历史。这些模式的一个共同特点是,通过初始返回平衡条件的趋势表明正静态稳定性。然而,由此产生的动态行为可能是稳定的、中性的或不稳定的。
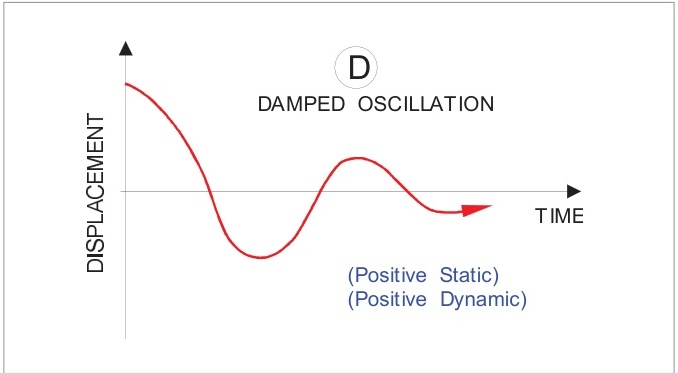
图表D说明了阻尼振荡的模式,其中幅度随时间减小。幅度随时间减小表明存在对运动的阻力,能量正在被耗散。能量耗散或阻尼对提供正动态稳定性是必要的。
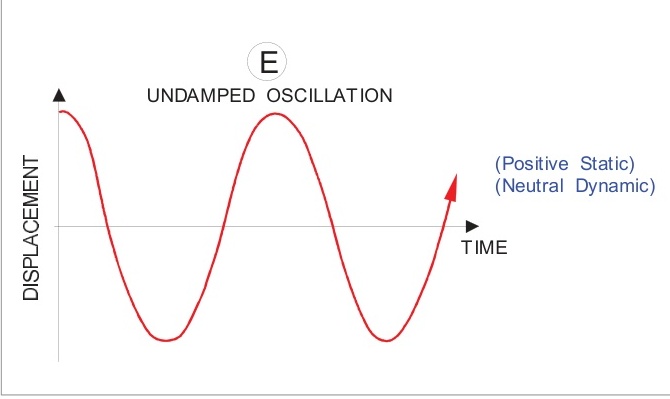
如果系统中没有阻尼,图表E的模式是结果,一个无阻尼振荡。没有阻尼,振荡继续而幅度随时间不减小。虽然这种振荡表明正静态稳定性,但存在中性动态稳定性。正阻尼对消除持续振荡是必要的。例如,一辆减震器(或"阻尼器")磨损的汽车缺乏足够的动态稳定性,持续的振荡运动既不愉快又潜在危险。同样,飞机必须有足够的阻尼以迅速消散可能影响飞机安全操作的任何振荡运动。当无法获得自然空气动力阻尼时,必须提供人工阻尼以提供必要的正动态稳定性。
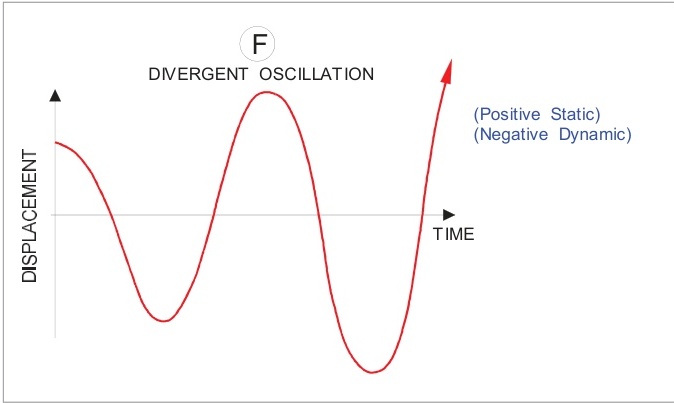
图表F说明了发散振荡的模式。这种运动是静态稳定的,因为它倾向于返回平衡位置。然而,每次随后返回平衡的速度都在增加,使得幅度随时间继续增加。因此,存在动态不稳定性。
发散振荡发生在能量被供应到运动中而不是被正阻尼耗散时。发散振荡的一个例子发生在飞行员无意中做出接近飞机俯仰自然频率的控制输入时;能量被添加到系统中,存在负阻尼,导致飞行员诱导振荡(PIO)。
静态稳定性的存在并不保证动态稳定性的存在。然而,动态稳定性的存在意味着静态稳定性的存在。
任何飞机都必须表现出所需程度的静态和动态稳定性。如果允许飞机具有快速发散率的静态不稳定性,飞行将非常困难,甚至不可能。此外,在某些领域必须有正动态稳定性,以防止飞机令人反感的持续振荡。
纵向动态稳定性
纵向动态稳定性的考虑关注飞机对扰动的时间历史响应,即扰动后位移幅度随时间的变化。
根据先前的定义:
-
当运动幅度随时间减小时,将存在动态稳定性,以及
-
如果幅度随时间增加,将存在动态不稳定性。
飞机必须对主要纵向运动表现出正动态稳定性。此外,飞机必须通过以一定速率减小运动幅度来表现出一定程度的纵向稳定性。所需的动态稳定性程度通常由幅度减小到原始值一半所需的时间指定:减小到半幅的时间。
自由飞行中的飞机有六个自由度:滚转、俯仰和偏航旋转,以及水平、垂直和横向平移。在纵向动态稳定性的情况下,自由度可以限制为俯仰旋转,加上垂直和水平平移。
由于飞机通常从左到右对称,因此不需要考虑纵向和横向/方向运动之间的耦合。
因此,飞机纵向运动的主要变量将是:
-
飞机的俯仰姿态。
-
攻角(将与俯仰姿态因飞行路径的倾斜而不同)。
-
真空速(TAS)
飞机的纵向动态稳定性通常由两种基本振荡模式组成:
-
长周期振荡(长周期运动)
-
短周期运动
虽然飞机的纵向运动可能由这些模式的组合组成,但每种模式的特性足够不同,可以单独研究每种振荡趋势。
长周期振荡(长周期运动)
动态纵向稳定性的第一种模式由被称为长周期运动的长周期振荡组成。
长周期运动或长周期振荡涉及明显的变化:
-
俯仰姿态,
-
高度和
-
空速,但
-
几乎恒定的攻角(载荷系数变化不大)。
长周期运动是关于某个平衡空速和高度的势能和动能的逐渐交换。图10.52说明了长周期运动的特征运动。
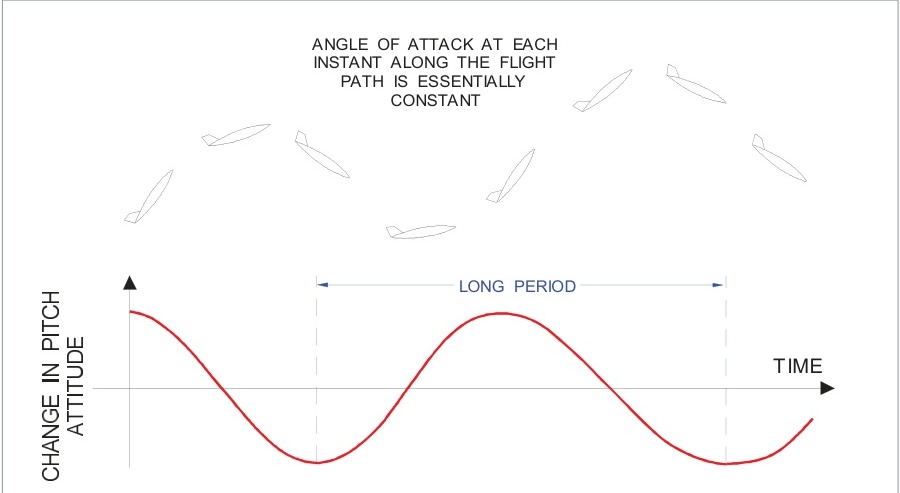
长周期运动的振荡周期在1到2分钟之间。由于俯仰率相当低,攻角只有微小变化,长周期运动的阻尼很弱。然而,这种弱阻尼不一定有任何重大后果。由于振荡周期如此之大,长周期振荡很容易被飞行员控制。由于长周期运动的性质,不需要做任何特定的空气动力学规定来抵消它。
短周期振荡
动态纵向稳定性的第二种模式是短周期振荡。
短周期振荡涉及攻角(载荷系数)的显著变化,速度、高度和俯仰姿态大致恒定;它由飞机在其静态稳定性不断恢复到平衡的快速俯仰振荡组成,短周期振荡的幅度由俯仰阻尼减小。
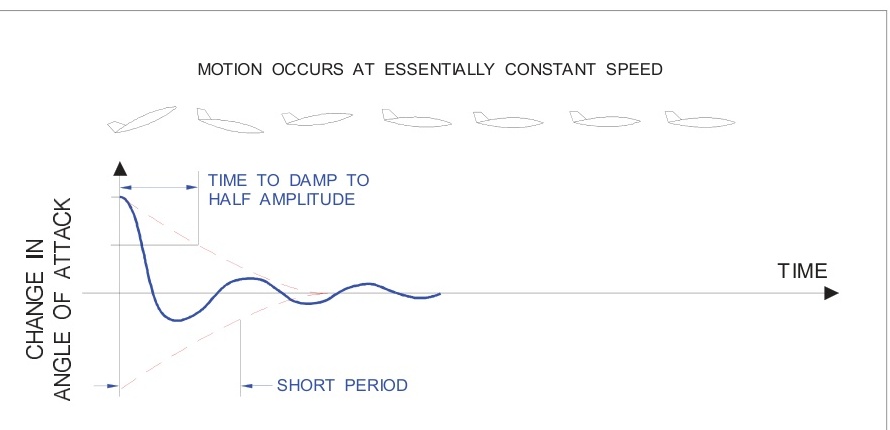
在高动压下的短周期振荡伴随攻角的大变化可能产生严重的"g"载荷(载荷系数的大变化)。
如图10.53所示,第二种模式具有相对较短的周期,与正常飞行员响应滞后时间相近,例如1或2秒或更少。飞行员可能试图强行阻尼振荡,实际上可能会加强振荡(PIO)并产生不稳定性。
如果发生短周期振荡,释放控制;飞机设计为表现必要的阻尼。即使飞行员试图在飞机振荡时保持控制静止,也可能导致控制系统中的小不稳定输入,这可能会加强振荡,产生失效的飞行载荷。
现代大型高速喷气式运输机配备有俯仰阻尼器,自动补偿任何动态纵向不稳定性。
在动态纵向稳定性的两种模式中,短周期振荡最为重要。短周期振荡可能由于"g"载荷的快速变化而产生破坏性飞行载荷,并且受到飞行员响应滞后(PIO)的不利影响。
已经指出,振荡幅度由俯仰阻尼减小,因此在空气动力阻尼减少的飞行条件下,动态稳定性问题可能变得急剧。
高空,因此低密度(高TAS),减少了空气动力阻尼,如第274页详述。
| 由于空气动力阻尼减少,高空时动态稳定性降低 |
方向稳定性和控制
飞机的方向稳定性本质上是"风向标"稳定性,涉及绕法线轴的力矩及其与偏航或侧滑角的关系。具有静态方向稳定性的飞机在受到某种扰动时将倾向于返回平衡。静态方向稳定性的证据将是偏航力矩的发展,这些力矩倾向于使飞机恢复平衡。
定义
飞机的轴系统定义了正偏航力矩N为绕法线轴的力矩,这种力矩倾向于使机头向右旋转。与其他空气动力学考虑一样,将偏航力矩以系数形式考虑是很方便的,这样静态稳定性可以独立于重量、高度、速度等进行评估。偏航力矩N通过以下方程以系数形式定义:
N = C n Q S b N=C_{n}QSb N=CnQSb
或
C n = N Q S b C_{n}=\frac {N}{QSb} Cn=QSbN
其中:
| 变量 | 解释 |
|---|---|
| N | 偏航力矩 |
| Q | 动压 |
| S | 机翼面积 |
| b | 翼展 |
| C n C_{n} Cn | 偏航力矩系数(向右为正) |
偏航力矩系数 C n C_{n} Cn基于机翼尺寸S和b,因为机翼是飞机的特征表面。
侧滑角
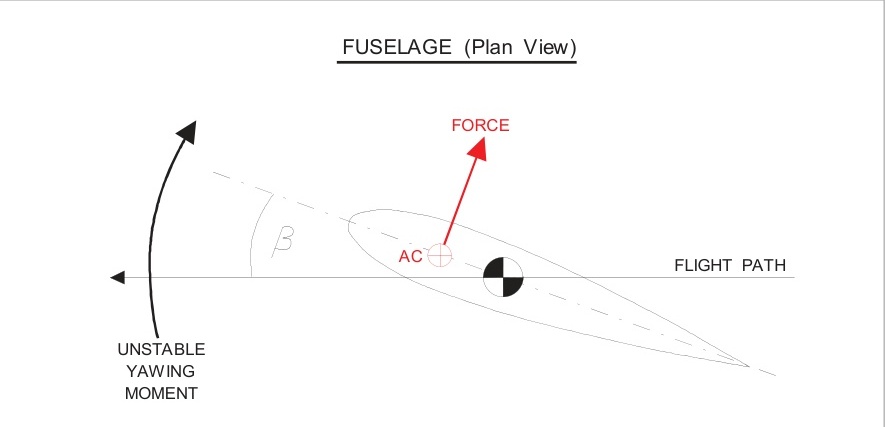
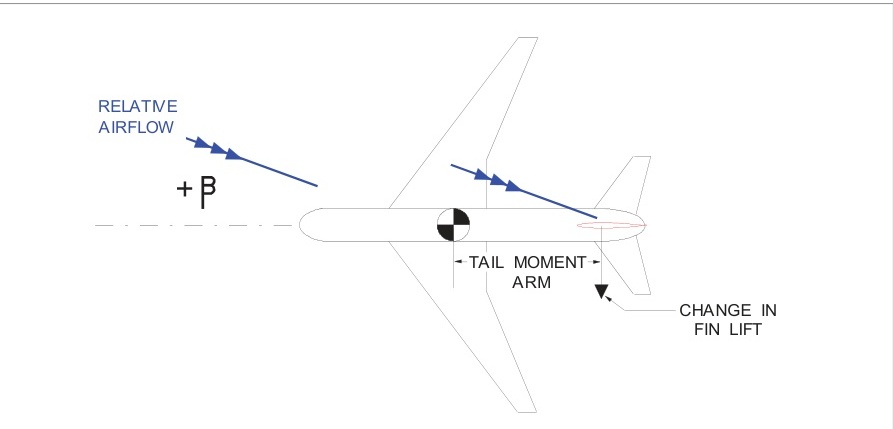
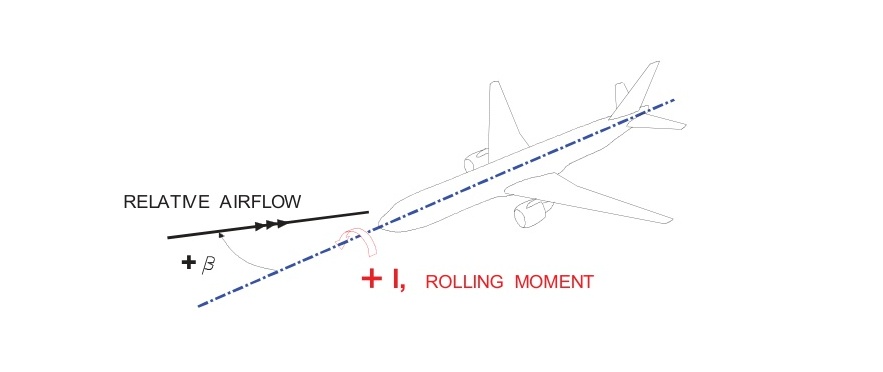
侧滑角表示飞机中心线与相对气流的偏移。侧滑角用符号β(贝塔)表示,当相对风从飞机中心线右侧偏移时为正。图10.54说明了侧滑角的定义。
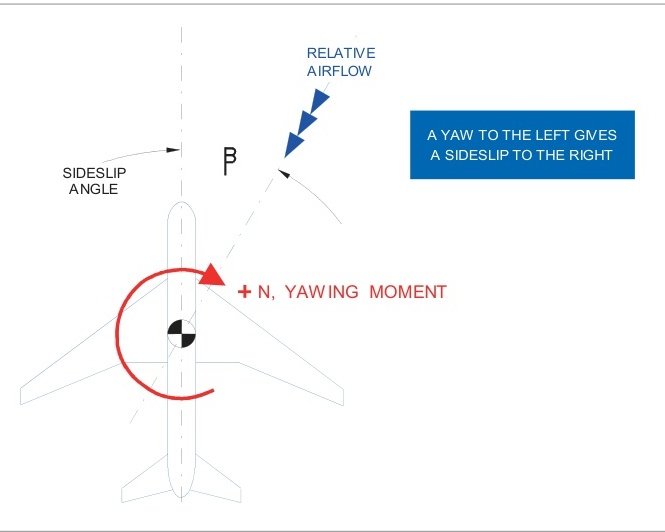
侧滑角β本质上是飞机的"方向攻角",是方向稳定性和横向稳定性考虑中的主要参考。飞机的静态方向稳定性可通过对侧滑的响应来理解。
静态方向稳定性
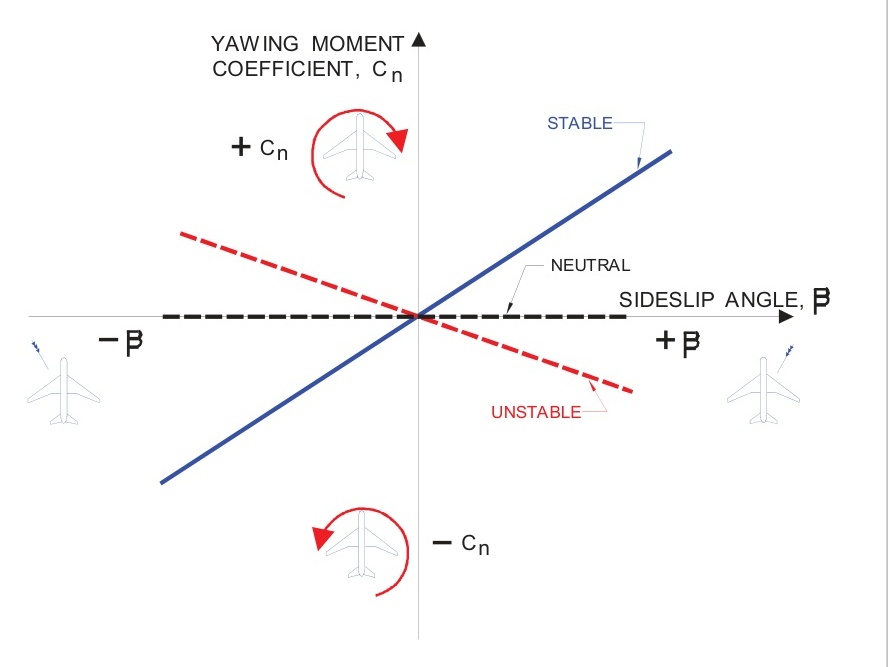
静态方向稳定性可以通过偏航力矩系数 C n C_{n} Cn与侧滑角 β \beta β的关系图来说明,如图10.55所示。当飞机受到正侧滑角影响时,如果产生正偏航力矩系数,则表明存在静态方向稳定性。因此,当相对气流来自右侧 ( + β ) (+\beta) (+β)时,应产生向右的偏航力矩 ( + C n ) \left(+C_{n}\right) (+Cn),这种力矩倾向于使飞机"风向标"效应将机头转向迎风方向。当 C n C_{n} Cn对 β \beta β的曲线具有正斜率时,存在静态方向稳定性,稳定性程度是这条曲线斜率的函数。如果曲线斜率为零,则没有返回平衡的趋势,存在中性静态方向稳定性。当 C n C_{n} Cn对 β \beta β的曲线具有负斜率时,侧滑产生的偏航力矩倾向于发散而非恢复,存在静态方向不稳定性。
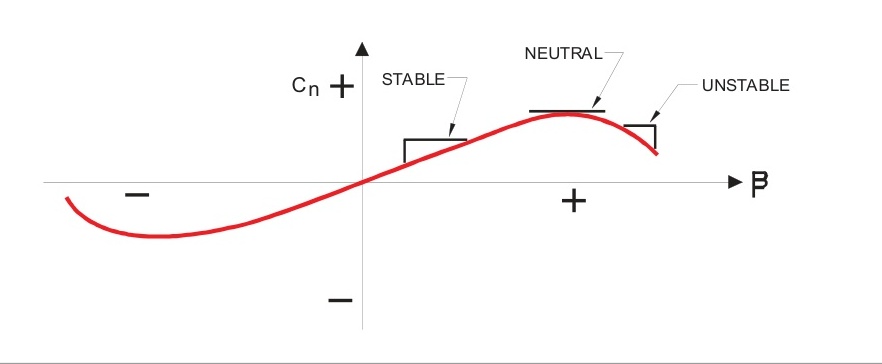
图10.56说明了 C n C_{n} Cn对 β \beta β曲线的瞬时斜率将描述飞机的静态方向稳定性。
-
在小侧滑角下,强正斜率表示强方向稳定性。
-
大侧滑角产生零斜率和中性稳定性。
-
在非常高的侧滑角下,曲线的负斜率表示方向不稳定性。
这种随侧滑角增加而方向稳定性衰减的情况并不罕见。然而,在正常飞行条件下的侧滑角范围内不应出现方向不稳定性。
静态方向稳定性必须在所有关键飞行条件下表现出来。通常,良好的方向稳定性是直接影响飞行员对飞机印象的基本品质。
飞机各组件的贡献
由于每个组件的贡献取决于并与其他组件相关,因此有必要分别研究每个组件。
机身
机身具有不稳定作用,如图10.57所示。它是一个空气动力学体,侧滑状态可以类比为"攻角",因此会产生空气动力学侧向力。这个侧向力通过机身空气动力学中心(AC)作用,该中心接近四分之一长度点。如果这个空气动力学中心位于飞机重心前方(通常情况下),则其效果是不稳定的。
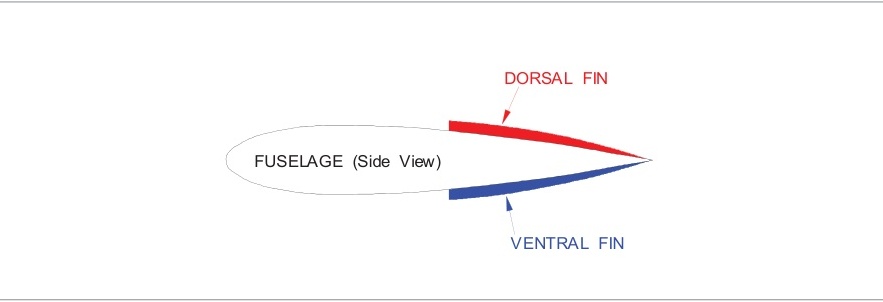
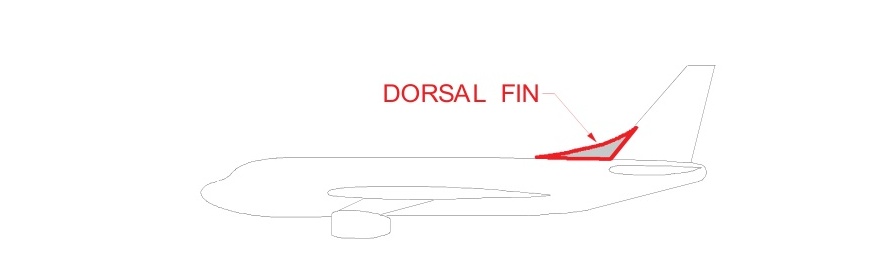
背鳍和腹鳍
为了克服机身的不稳定性,可以在整体设计中加入背鳍或腹鳍。背鳍是安装在机身顶部靠后位置的小翼型,具有非常低的展弦比。腹鳍则安装在下方。这些鳍如图10.58所示。
如果飞机向右偏航,背鳍和腹鳍将产生向右的侧向力。这个力的作用线远在飞机重心后方,产生向左的偏航力矩(稳定效应)。然而,在小偏航角时它们效果不明显。
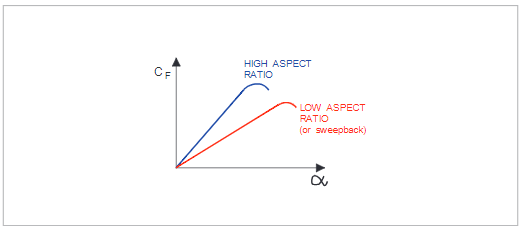
背鳍和腹鳍在小侧滑角下产生的侧向力非常小,因为:
-
背鳍和腹鳍处于低攻角状态,
-
它们的表面积小,以及
-
它们的展弦比非常低,导致升力曲线斜率小。图10.59。
当安装了背鳍和腹鳍时,在偏航方面不稳定的机身在低侧滑角下仍然不稳定。背鳍和腹鳍在相对较高的侧滑角下变得更有效。由于它们的低展弦比,它们不会在飞机可能在服役中遇到的任何侧滑角下失速。
背鳍和腹鳍的有效性随侧滑角增加而增加,因此机身与背鳍或腹鳍的组合在大侧滑角下是稳定的。
虽然背鳍和腹鳍对静态方向稳定性的贡献方式完全相同,但背鳍对静态横向稳定性有正面贡献,而腹鳍在这种模式下是不稳定的,这将在后面证明。因此,背鳍更为常见。
垂直尾翼
垂直尾翼(垂直安定面)是飞机方向稳定性的主要来源。如图10.61所示,在侧滑中,垂直尾翼将经历攻角变化。垂直尾翼升力(侧向力)的变化产生绕重心的偏航力矩,这种力矩倾向于使飞机偏航进入相对气流。垂直尾翼对静态方向稳定性贡献的大小取决于垂直尾翼升力的变化和垂直尾翼力臂。显然,垂直尾翼力臂是一个强大的因素。
垂直尾翼对方向稳定性的贡献取决于其在给定侧滑角变化下产生升力或侧向力变化的能力。垂直尾翼的贡献是其面积的直接函数。所需的方向稳定性可以通过增加垂直尾翼面积来获得。然而,增加表面积有明显的缺点,即增加寄生阻力。
垂直尾翼的升力曲线斜率决定了表面对攻角变化的敏感程度。虽然垂直尾翼具有高升力曲线斜率是可取的,但高展弦比的表面不一定实用或可取——弯曲、较低的失速角(图10.59)、机库屋顶间隙等。表面的失速角必须足够大,以防止在预期的侧滑角下失速和随后的效能损失。(后掠或低展弦比增加了垂直尾翼的失速攻角)。
垂直尾翼运行的流场受到飞机其他组件以及动力效应的影响。垂直尾翼处的动压可能取决于螺旋桨的滑流或机身的边界层。此外,垂直尾翼处的局部流动方向受到机翼尾流、机身横流、水平尾翼诱导流或螺旋桨滑流方向的影响。这些因素中的每一个都必须被考虑为可能影响垂直尾翼对方向稳定性的贡献。
高位水平尾翼("T"型尾翼)通过充当"端板"使垂直尾翼更有效。垂直尾翼上的侧向力相对于机身上的侧向力(不稳定的)可能仍然较小,但由于其作用线远在重心后方,它产生的偏航力矩相对较大,使机身-垂直尾翼组合整体稳定。垂直尾翼作为稳定器的效果原理与背鳍或腹鳍的情况相同。然而,由于它更大,特别是具有更高的展弦比,它在低侧滑角下是有效的。它保持有效直到侧滑角使垂直尾翼攻角接近其失速角,但在这个值以上,垂直尾翼上的侧向力随侧滑角增加而减少,垂直尾翼不再作为稳定器有效。正是在这一点上,背鳍或腹鳍变得重要。由于它在更高的攻角下才失速,它在大侧滑角下接管了垂直尾翼的稳定作用。
机翼和发动机舱
机翼对静态方向稳定性的贡献通常很小:
-
单独的直翼的贡献通常可以忽略不计。
-
后掠产生稳定效应,这种效应随 C L C_{L} CL增加而增加(即在较低IAS下)。
-
机翼上的发动机舱产生的贡献将取决于诸如它们的大小和位置以及机翼平面形状等因素。在直翼上,它们通常产生不稳定效应。
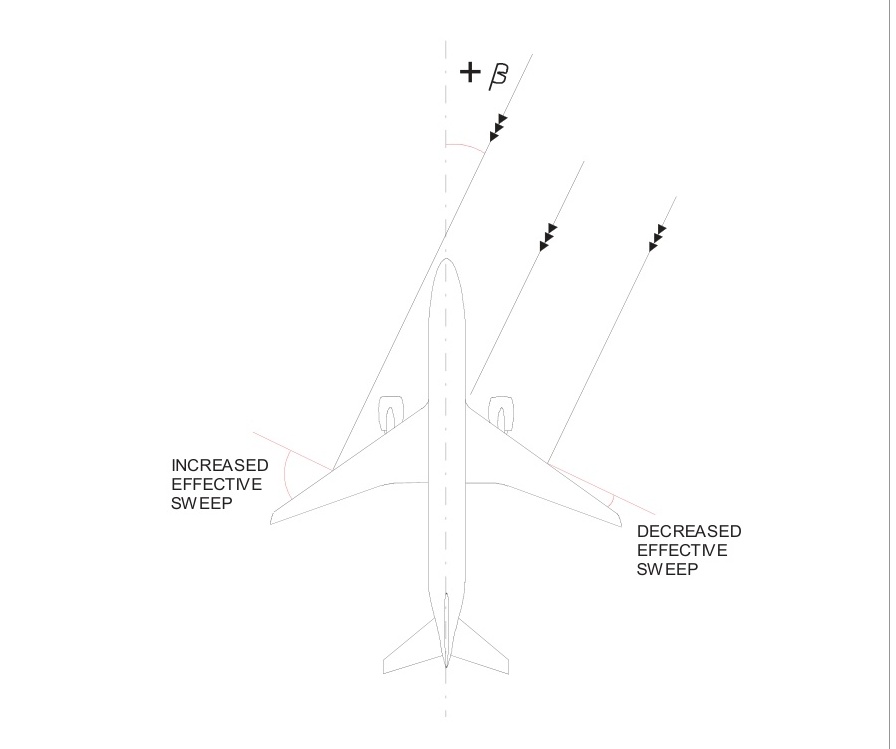
后掠翼提供稳定贡献,取决于后掠量,但与其他组件相比,这种贡献相对较弱。考虑一个侧滑的后掠翼,如图10.62所示。
前方右侧机翼相对于气流的倾斜度大于后方机翼,因此右侧的升力和诱导阻力更大(前方机翼升力增加的影响将在考虑横向静态稳定性时解释)。机翼两侧阻力差异的结果是产生向右的偏航力矩,这种力矩倾向于消除侧滑。这是一种稳定效应,如果后掠角相当大,可能很重要。
图10.63通过分离机身和垂直尾翼的贡献,说明了飞机方向稳定性的典型构成。如 C n C_{n} Cn对 β \beta β的图表所示,机身的贡献是不稳定的,但不稳定性在大侧滑角下减小。单独垂直尾翼的贡献在表面开始失速前高度稳定。垂直尾翼的贡献必须足够大,使完整飞机(机翼-机身-垂直尾翼组合)表现出所需的稳定性程度。
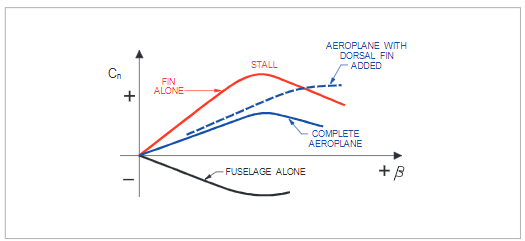
背鳍对保持大侧滑角下的方向稳定性有强大作用,这种角度会导致垂直尾翼失速。
向飞机添加背鳍将通过两种方式减少高侧滑下方向稳定性的衰减:
-
最不明显但最重要的效果是在大侧滑角下大幅增加机身稳定性。
-
此外,垂直尾翼的有效展弦比降低,这增加了表面的失速角。
通过这种双重效应,添加背鳍是一种非常有用的装置。后掠垂直尾翼的升力曲线斜率降低也将减少垂直尾翼在高侧滑角下失速的趋势。
动力效应
动力对静态方向稳定性的影响与动力对静态纵向稳定性的影响相似。直接效应仅限于螺旋桨平面的法向力,当然,当螺旋桨位于重心前方时,这是不稳定的。此外,螺旋桨后方的滑流中的空气围绕机身螺旋,这在垂直尾翼处产生侧洗(顺时针旋转的螺旋桨产生从左侧的侧洗)。动力诱导速度和垂直尾翼处流动方向变化的间接效应(螺旋滑流效应)对螺旋桨驱动飞机非常显著,可能产生大的方向配平变化。与纵向情况一样,间接效应对喷气动力飞机可以忽略不计。
直接和间接动力效应对静态方向稳定性的贡献对螺旋桨动力飞机最大,对喷气动力飞机通常很小。在任何情况下,动力的一般效应是不稳定的,最大贡献将发生在高功率和低动压下。
关键条件
静态方向稳定性的最关键条件通常是几个单独效应的组合。产生最关键条件的组合很大程度上取决于飞机类型。此外,存在横向和方向效应的耦合,使得所需的静态方向稳定性程度可能由这些耦合条件中的一些决定。
重心位置
重心位置对静态方向稳定性的影响相对可忽略。任何飞机上通常的重心位置范围由纵向稳定性和控制的限制设定。在这个限制范围内的重心位置,垂直尾翼、机身、发动机舱等的贡献没有显著变化。因此,静态方向稳定性基本上不受纵向限制范围内重心位置变化的影响。
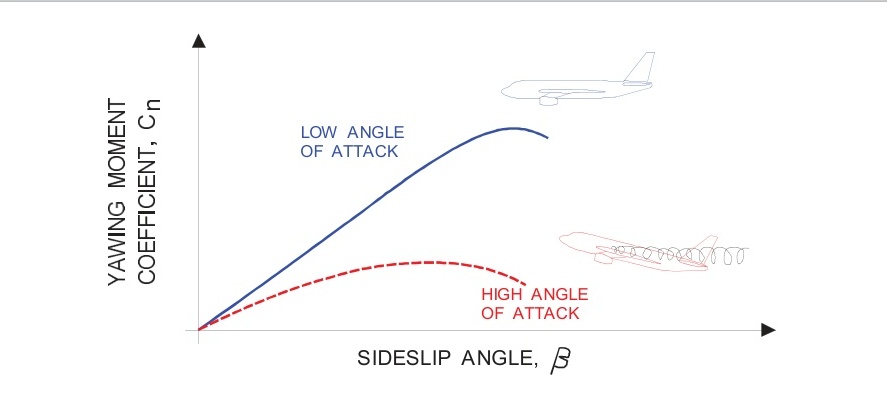
高攻角
当飞机处于高攻角时,可以预期静态方向稳定性会降低。如图10.64所示,高攻角降低了 C n C_n Cn对 β \beta β曲线的稳定斜率。静态方向稳定性的降低很大程度上是由于垂直尾翼贡献的减少。在高攻角下,由于垂直尾翼位置处机身边界层的增加,垂直尾翼的有效性降低。攻角与方向稳定性的衰减对后掠飞机最为显著,因为这种构型需要高攻角才能达到高升力系数。
腹鳍
可以添加腹鳍作为方向稳定性的额外贡献,如图10.65所示。着陆间隙要求可能限制它们的尺寸,要求它们可收回或要求安装两个较小的腹鳍而不是一个大腹鳍。
静态方向稳定性的最关键要求将来自以下效应的某种组合:
-
高侧滑角
-
低空速下的高功率
-
高攻角
-
高马赫数
螺旋桨动力飞机可能有如此显著的动力效应,以至于关键条件可能发生在低速下,而高马赫数的影响可能为典型的跨音速喷气动力飞机产生关键条件。此外,横向和方向效应的耦合可能需要规定的方向稳定性程度。
横向稳定性和控制
飞机的静态横向稳定性涉及由侧滑引起的滚转力矩的考虑。如果飞机对侧滑有有利的滚转力矩,从水平飞行的横向位移产生侧滑,而侧滑产生倾向于使飞机返回水平飞行的滚转力矩。通过这种作用,静态横向稳定性将变得明显。当然,侧滑将产生偏航力矩,取决于静态方向稳定性的性质,但静态横向稳定性的考虑将只涉及滚转力矩和侧滑的关系。
定义
飞机的轴系统定义了正滚转力矩L为绕纵轴的力矩,这种力矩倾向于使右翼向下旋转。与其他空气动力学考虑一样,将滚转力矩以系数形式考虑是很方便的,这样横向稳定性可以独立于重量、高度、速度等进行评估。滚转力矩L通过以下方程以系数形式定义:
L = C 1 Q S b L=C_{1}QSb L=C1QSb
或
C 1 = L Q S b C_{1}=\frac {L}{QSb} C1=QSbL
其中:
| 变量 | 解释 |
|---|---|
| L L L | 滚转力矩(向右为正) |
| Q Q Q | 动压 |
| S S S | 机翼面积 |
| b b b | 翼展 |
| C 1 C_{1} C1 | 滚转力矩系数(向右为正) |
侧滑角 β \beta β之前已定义为飞机中心线与相对风之间的角度,当相对风在中心线右侧时为正。
静态横向稳定性
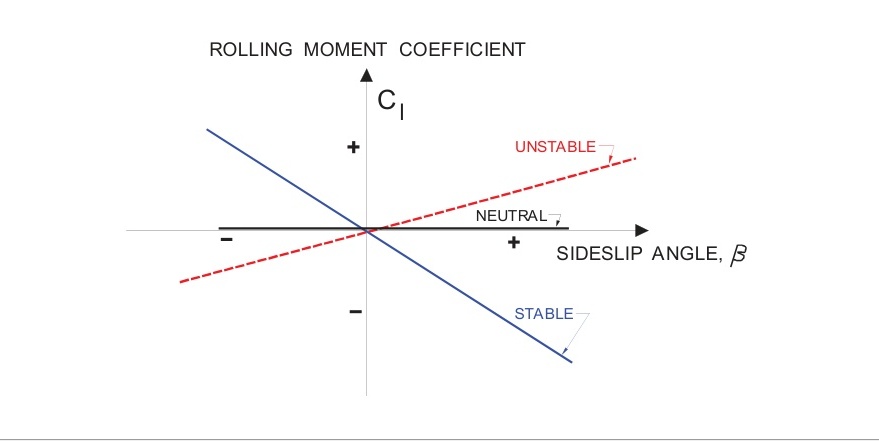
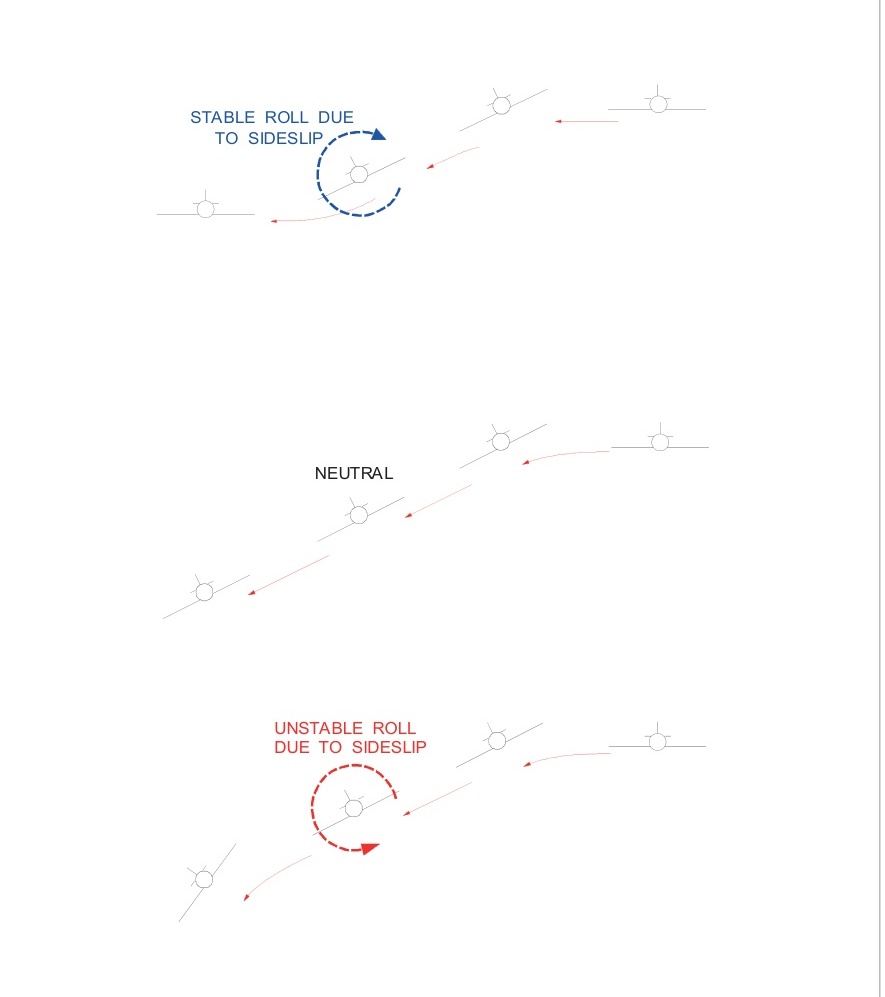
静态横向稳定性可以通过滚转力矩系数 C 1 C_{1} C1与侧滑角 β \beta β的关系图来说明,如图10.67所示。当飞机受到正侧滑角影响时,如果产生负滚转力矩系数,则表明存在横向稳定性。因此,当相对气流来自右侧 ( + β ) (+\beta) (+β)时,应产生向左的滚转力矩 ( − C 1 ) (-C_1) (−C1),这种力矩倾向于使飞机向左滚转。当 C 1 C_1 C1对 β \beta β的曲线具有负斜率时,存在横向稳定性,稳定性程度是这条曲线斜率的函数。如果曲线斜率为零,存在中性横向稳定性;如果斜率为正,存在横向不稳定性。
拥有静态横向稳定性(侧滑产生有利的滚转)是可取的,如图10.68所示。然而,所需的横向稳定性大小由许多因素决定。过度的侧滑引起的滚转会使侧风起飞和着陆复杂化,并可能导致与飞机方向运动不良的振荡耦合。此外,高横向稳定性可能与不利偏航相结合,阻碍滚转性能。通常,良好的操纵品质是通过相对轻微或弱正横向稳定性获得的。
飞机各组件的贡献
为了理解飞机横向稳定性的发展,必须检查每个贡献组件。组件之间会有干扰,这将改变飞机上每个组件对稳定性的贡献。
机翼
对飞机横向稳定性贡献最主要的表面是机翼。几何上反角对横向稳定性有强大贡献。
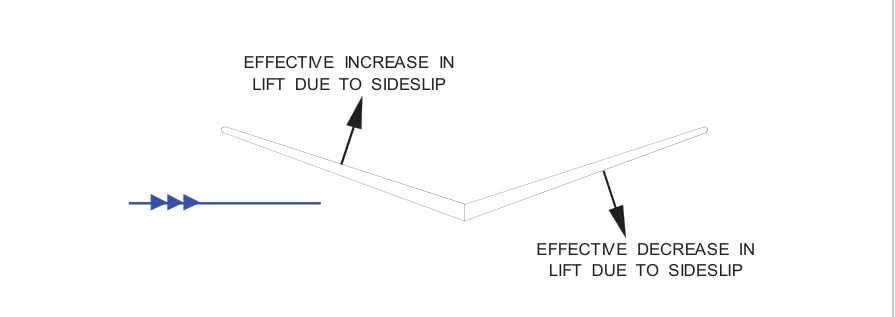
如图10.69所示,具有几何上反角的机翼将在侧滑时产生稳定的滚转力矩。如果相对风来自侧面,迎风的机翼受到攻角增加并产生升力增加。背风的机翼受到攻角减少并产生升力减少。两翼升力的变化产生倾向于抬升迎风机翼的滚转力矩,因此几何上反角对侧滑产生稳定的滚转贡献。
由于几何上反角在产生横向稳定性方面如此强大,它被视为所有其他组件横向稳定性贡献的共同分母。通常,机翼位置、襟翼、动力等的贡献表示为"上反效应"。
*几何上反角:当飞机未倾斜且水平时,每个机翼平面与水平面之间的角度;当机翼位于水平面上方时为正,如图10.69所示。一些飞机使用负几何上反角,称为下反角。
机翼位置
单独机身的贡献通常很小;取决于机身上空气动力学侧向力合力的位置。
然而,机翼-机身-尾部组合的效应是显著的,因为机翼在机身上的垂直位置可能极大地影响这种组合。位于中翼位置的机翼通常表现出的"上反效应"与单独机翼没有不同。
图10.70说明了机翼位置对静态横向稳定性的影响。
-
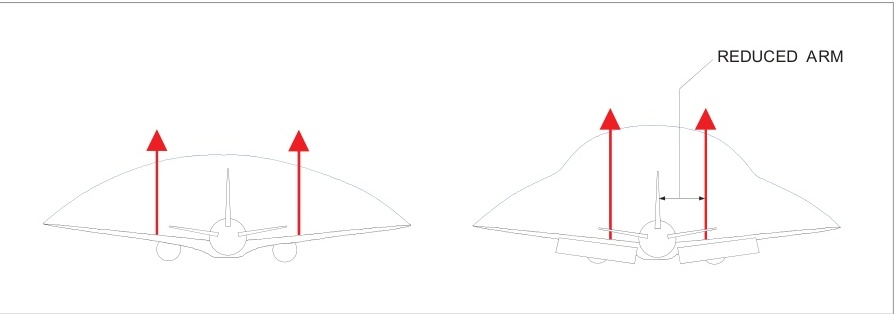
低翼位置产生不稳定贡献。相对气流方向减少了迎风机翼的有效攻角并增加了背风机翼的有效攻角——倾向于增加滚转力矩。
-
高翼位置产生稳定贡献。相对气流方向增加了迎风机翼的有效攻角并减少了背风机翼的有效攻角,倾向于减少滚转力矩。
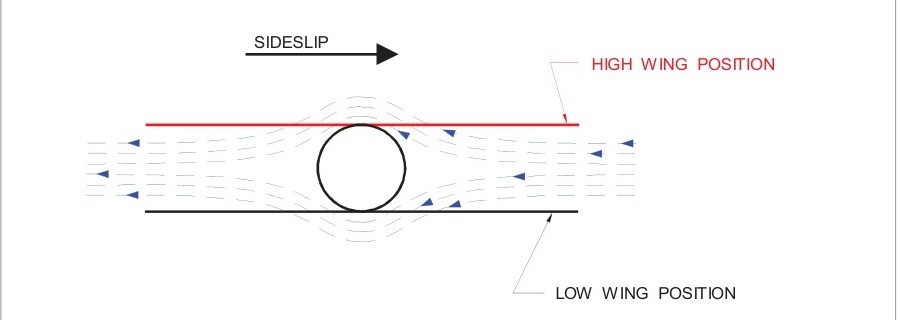
机翼垂直位置贡献的"上反效应"大小很大,可能需要低翼构型有明显的上反角。另一方面,高翼位置通常根本不需要几何上反角。
后掠
后掠对"上反效应"的贡献很重要,这是由于其贡献的性质。如图10.71和图10.72所示,如果机翼处于正升力系数状态,迎风的机翼后掠角减小且升力增加,背风的机翼后掠角增加且升力减少;这将产生负滚转力矩,使机翼倾向于回到水平位置。通过这种方式,后掠机翼贡献了正的"上反效应"。(前掠机翼则会产生负的上反效应)。
后掠对"上反效应"的贡献与机翼升力系数和后掠角度成正比。由于高速飞行需要较大的后掠角,在低速(高升力系数)时会出现过高的"上反效应"。后掠机翼的飞机比直翼飞机需要更少的几何上反角。
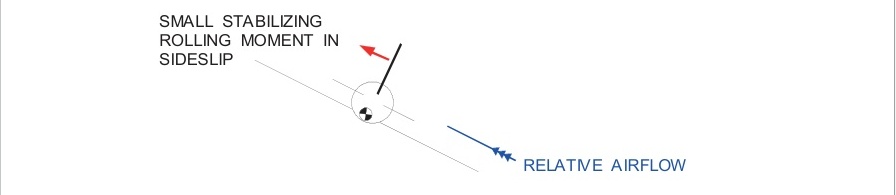
垂直尾翼可以提供小的"上反效应"贡献,如图10.73所示。如果垂直尾翼较大,侧滑产生的侧向力可能会产生滚转力矩,同时也产生重要的偏航力矩贡献。垂直尾翼对纯横向静态稳定性的贡献通常很小。
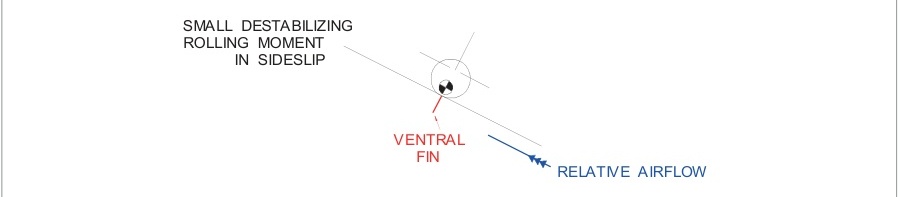
腹鳍位于飞机重心下方,对横向静态稳定性有负面影响,如图10.74所示。
通常,"上反效应"不应过大,因为过大的侧滑引起的滚转可能会造成某些问题。
过大的"上反效应"可能导致"荷兰滚"、滚转机动中的方向舵协调困难,或在侧风起飞和着陆时对横向控制力提出极高要求。如果飞机在巡航时表现出令人满意的"上反效应",在起飞和着陆构型时可以容忍某些例外情况。由于襟翼和动力的影响是不稳定的,会减少"上反效应",这些因素可能导致一定程度的负"上反效应"。
襟翼的偏转使机翼内侧部分变得相对更有效,而这些部分的展向力臂较小,如图10.75所示。因此,侧滑引起的机翼升力变化发生在更靠内侧的位置,上反效应减小。
动力对"上反效应"的影响对喷气式飞机几乎可以忽略,但对螺旋桨驱动的飞机影响很大。在高功率和低空速时,螺旋桨滑流使机翼内侧部分更加有效,减少了上反效应。
当襟翼和动力效应结合时,"上反效应"的减少最为严重,例如螺旋桨驱动飞机在带动力进近时。
除了着陆和起飞条件下的某些例外情况外,"上反效应"或横向稳定性应该是正的但轻微的。过大的"上反效应"会造成相当大且难以应对的问题。飞行员可以通过保持侧滑所需的操纵杆力和位移感受到横向稳定性。如果操纵杆力稳定性为正,则表现为控制侧滑方向所需的操纵杆力。
结论
设计师面临一个两难境地。飞机采用后掠设计是为了提高其可运行的速度,但后掠的副产品是静态横向稳定性。后掠机翼比直翼需要更少的几何上反角。如果还要求将机翼安装在机身顶部,则会产生额外的"上反效应"。高位后掠机翼会产生过大的"上反效应",因此使用下反角来将"上反效应"降低到所需水平。
横向动态效应
前面的讨论将飞机对侧滑的横向和方向响应分开,以便对每一方面进行详细研究。
然而,当飞机处于侧滑状态时,横向和方向响应将会耦合,即侧滑会同时产生滚转和偏航力矩。
决定飞机横向动态特性的主要因素是:
-
侧滑引起的滚转力矩,或"上反效应"(静态横向稳定性)。
-
侧滑引起的偏航力矩,或静态方向稳定性。
螺旋发散
当静态方向稳定性与"上反效应"相比非常大时,会出现螺旋发散。
螺旋发散的特性并不剧烈。飞机从平飞平衡状态被扰动后,开始一个缓慢的螺旋,逐渐增加到螺旋俯冲。当引入小的侧滑时,强大的方向稳定性倾向于将机头恢复到迎风位置,而相对较弱的"上反效应"在恢复飞机横向状态时滞后。螺旋运动中的发散率通常非常缓慢,飞行员可以毫不费力地控制这种趋势。
荷兰滚
当"上反效应"与静态方向稳定性相比较大时,会出现荷兰滚。
荷兰滚是一种耦合的横向和方向振荡,由于其振荡性质而令人不满。
当引入偏航时,强大的"上反效应"会由于迎风机翼升力增加而使飞机滚转。上升机翼上增加的诱导阻力会使飞机向相反方向偏航,反转耦合振荡。
有荷兰滚倾向的飞机配备有偏航阻尼器。它会自动偏转方向舵,与偏航率成比例,以抑制振荡。
如果偏航阻尼器在飞行中失效,建议飞行员使用副翼来抑制荷兰滚。由于响应滞后,如果飞行员使用方向舵,会导致飞行员诱导振荡(PIO),荷兰滚可能很快变得发散,导致失控。
荷兰滚令人不满,而螺旋发散如果发散率较低则可以接受。因此,"上反效应"不应超过满足横向稳定性所需的程度。
如果静态方向稳定性足够充分以防止令人不满的荷兰滚,这自然会足以防止方向发散。由于更重要的操控品质是高静态方向稳定性和最低必要的"上反效应"的结果,大多数飞机表现出轻微的螺旋倾向。如前所述,弱螺旋倾向对飞行员来说并不重要,肯定比荷兰滚更可取。
后掠对飞机横向动态特性的贡献很显著。由于后掠产生的"上反效应"是升力系数的函数,动态特性可能在整个飞行速度范围内变化。
当后掠机翼飞机处于低升力系数时,"上反效应"较小,可能表现出螺旋倾向。当后掠机翼飞机处于高升力系数时,"上反效应"增加,荷兰滚振荡倾向增加。
飞行员诱导振荡(PIO)
由于控制器上的无意操作,可能会出现某些不良运动。这些可能发生在任何轴上,但最重要的情况存在于飞机的短周期纵向运动中,飞行员控制系统响应滞后可能产生不稳定的振荡。飞行员/控制系统/飞机组合中可能的耦合能够产生破坏性的飞行载荷并导致飞机失控。
当正常的人类响应滞后和控制系统滞后与飞机运动耦合时,飞行员的无意控制反应可能为振荡运动提供负阻尼,从而产生动态不稳定性。
由于短周期运动频率相对较高,俯仰振荡的幅度可能在令人难以置信的短时间内达到危险程度。
当遇到飞行员诱导振荡时,最有效的解决方案是立即释放控制。任何试图强行抑制振荡的尝试只会继续激发并放大振荡。释放控制移除了不稳定(但无意的)激发,允许飞机通过其固有的动态稳定性恢复。
高马赫数
通常,高马赫数飞行会在高空进行,因此必须分开研究高空的影响。空气动力阻尼是由飞机的俯仰、滚转或偏航旋转产生的力矩造成的。这些力矩来源于尾部、机翼和垂直尾翼表面随角速度变化的攻角变化(见图10.38)。
高空飞行常见的较高真空速减少了攻角变化,降低了空气动力阻尼。实际上,空气动力阻尼与相对密度的平方根成正比,类似于真空速与等效空速的比例。因此,在国际标准大气40000英尺高度,空气动力阻尼将降低到国际标准大气海平面值的一半。
马赫配平
当速度超过临界马赫数( M C R I T \mathrm{M}_{\mathrm{CRIT}} MCRIT)时,后掠机翼根部的激波形成将:
-
减少重心前方的升力,以及
-
减少尾翼处的下洗。
这些因素共同产生机头下俯的俯仰力矩。在高马赫数时,飞机对速度变得不稳定;随着速度增加,不再需要增加推力,而是需要拉力来防止飞机进一步加速。这是潜在的危险。马赫数的小幅增加会导致机头下俯,进一步增加马赫数。这反过来又会导致机头下俯俯仰力矩进一步增加。这种不利的高速特性,被称为"马赫俯冲"、“高速俯冲"或"俯冲下降”,会限制现代高速喷气式运输机的最大运行速度。
为了在高马赫数时保持所需的操纵杆力梯度,必须安装马赫配平系统。这种对马赫数敏感的装置可能:
-
向上偏转升降舵,
-
减小可变入射角配平尾翼的入射角,或
-
通过将燃油从机翼转移到后部配平油箱来使重心向后移动。
其调整量大于仅仅补偿配平变化所需的量。这确保在高马赫数巡航时保持所需的操纵杆力梯度。
无论特定制造商使用哪种配平方法,马赫配平系统都会调整纵向配平,并且仅在高马赫数时工作。
关键事实 2
自学(参考前面段落填入缺失的单词)。
正静态纵向稳定性表现为 C M C_{M} CM 对 C C C 的斜率为__________。__________纵向稳定性的程度由曲线的__________表示。
绕__________轴的净俯仰力矩是由各个组成__________在其适当的__________场中作用的贡献造成的。
在大多数情况下,机身和发动机舱的贡献是__________。
(第259XXX页)在高 C L C_{L} CL(低速)时,如果出现以下情况,静态稳定性可能会发生明显变化:
a) 飞机有__________。
b) 有大量的"__________效应"贡献。
c) 在水平尾翼处有__________的显著变化。
水平尾翼通常提供飞机所有组件中最__________的稳定影响。
__________降低静态纵向稳定性。
如果推力线位于重心下方,推力增加将产生__________或机头__________力矩,其效果是__________。
高升力装置倾向于__________尾部的下洗和__________尾部的动态压力,这两者都是__________。
对于给定的俯仰速度,真空速增加会__________空气动力阻尼。
具有正机动稳定性的飞机应该表现出随着载荷系数或"__________"的__________而稳定__________的操纵杆力。
操纵杆力梯度不能过于__________,否则飞机将难以操纵且令人疲劳。同样,操纵杆力梯度也不能太__________,否则在控制力轻微时飞机可能会无意中超负荷。
当飞机具有高静态稳定性时,机动稳定性将__________,并且会产生__________操纵杆力梯度。可以设置__________重心限制以防止过高的机动操纵杆力梯度。随着重心向后移动,操纵杆力梯度随着机动稳定性的__________而__________,并且可能达到操纵杆力梯度的__________限制。
在高高度,高真空速__________给定俯仰速度下尾部攻角的变化,并__________俯仰阻尼。因此,随着高度的__________,可以预期机动操纵杆力稳定性会降低。
飞行控制系统可能采用__________弹簧、__________弹簧或__________重物,以在飞机的速度、重心和高度范围内提供令人满意的控制力。
静态稳定性关注的是飞机回到平衡状态的初始趋势,而动态稳定性则由随__________变化的__________定义。
如果运动的__________随时间__________,飞机将表现出正动态稳定性。
当无法获得自然空气动力阻尼时,必须提供__________阻尼以提供必要的正动态稳定性。
飞机的纵向动态稳定性通常由两种基本振荡模式组成:
a) __________周期(长周期振荡)
b) __________周期
长周期振荡发生时__________基本保持恒定。
振荡周期如此之长,飞行员很容易抵消____________________振荡。
短周期振荡涉及__________的显著变化。
短周期振荡____________________被飞行员控制。
由于__________空气动力__________,动态稳定性问题在__________高度可能变得严重。
为了克服机身中的方向不稳定性,可以在整体设计中加入__________或__________鳍。
__________是飞机方向稳定性的主要来源。
__________尾使鳍更有效,因为它充当"__________板"。
由于__________鳍在更高的攻角下失速,它在大侧滑角下接管了鳍的稳定作用。
__________产生方向稳定效果,随着 C L C_{L} CL 的增加而增加。
__________鳍增加了在__________攻角下的方向稳定性。着陆间隙要求可能限制它们的尺寸,要求它们可收回,或者要求安装两个较小的腹鳍而不是一个大的。
通常,良好的操控品质是通过相对__________或__________正侧向稳定性获得的。
对飞机侧向稳定性贡献最大的主要表面是__________。几何__________的效果对侧向稳定性有强大贡献。
低翼位置对静态侧向稳定性提供__________贡献。
__________翼位置对静态侧向稳定性提供稳定贡献。
由翼的垂直位置贡献的"上反效应"的大小是__________,并且可能需要__________翼构型的明显上反角。另一方面,高翼位置通常__________需要几何__________。
__________后掠翼贡献了正的"上反效应"。
带有后掠翼的飞机比直翼需要__________几何上反。
鳍对纯侧向静态稳定性的贡献通常很__________。
过度的"上反效应"可能导致"__________滚",在__________机动中难以协调方向舵,或者在侧风起飞和着陆期间对侧向控制力提出极高要求。
部署部分跨度襟翼会产生__________上反效应。
后掠翼比直翼需要少得多的几何上反。如果还要求将机翼安装在机身顶部,则会出现额外的"上反效应"。高位安装的后掠翼会产生过度的"上反效应",因此使用__________来将"上反效应"降低到所需水平。
当飞机处于侧滑状态时,侧向和方向响应将是__________的,即侧滑将同时产生__________和__________力矩。
当静态方向稳定性与"上反效应"相比非常__________时,将存在螺旋发散。
螺旋运动中的发散率通常非常__________,飞行员可以毫无__________地控制这种趋势。
当"上反效应"与静态方向稳定性相比__________时,将发生荷兰滚。
发生荷兰滚的飞机配备有__________阻尼器。这会自动偏转方向舵,与偏航__________成比例,以消除振荡。
如果偏航阻尼器在飞行中失效,建议飞行员使用__________来消除荷兰滚。
如果飞行员使用__________,将导致飞行员诱导振荡(PIO),荷兰滚可能很快变得__________,导致__________。
当后掠翼飞机处于低 C L \mathrm {C}_{\mathrm {L}} CL 时,"上反效应"很小,可能会出现__________趋势。当后掠翼飞机处于高 C L C_{L} CL 时,"上反效应"增加,____________________振荡趋势增加。
当遇到飞行员诱导振荡时,最有效的解决方案是立即__________控制。任何强行阻尼振荡的尝试只会__________激励并__________振荡。
高高度飞行常见的较高真空速__________攻角__________变化并降低空气动力__________。
马赫俯冲是由于重心前方升力__________和尾部下洗__________引起的,这是由于在__________马赫数下后掠翼上形成__________造成的。
马赫配平系统将调整____________________以维持所需的____________________梯度,并且仅在__________马赫数下运行。
带有插入缺失单词的关键事实2可在第326XXX页找到。
总结
自学
稳定性是飞机固有的品质,能够纠正可能扰乱其平衡的状况,并返回或继续其原始飞行路径。飞机可以有两种基本类型的稳定性:静态和动态,每种类型有三种状态:正、中性和负。
静态稳定性描述飞机在其三个轴中的一个或多个轴上从平衡状态被扰动后的初始反应。
正静态稳定性是指当飞机从平衡状态被扰动时,会产生恢复力使其倾向于回到原始状态的稳定性状态。如果飞机有初始趋势回到其原始平衡姿态,它具有正静态稳定性(静态稳定)。
具有中性静态稳定性的飞机产生的力既不倾向于使其回到原始状态,也不会使其进一步偏离这种状态。如果飞机倾向于保持其新的、被扰动的状态,它具有中性静态稳定性(静态中性)。
如果飞机具有负静态稳定性,当它从平衡状态被扰动时,会产生使其进一步偏离原始状态的力。负静态稳定性是一种高度不良的特性,因为它可能导致失控。当飞机继续偏离时,它表现出负静态稳定性(静态不稳定)。
大多数飞机在俯仰和偏航方面具有正静态稳定性,在滚转方面接近于中性静态稳定。
当飞机在其三个轴中的任何一个轴上表现出正静态稳定性时,"动态稳定性"一词描述飞机的长期趋势。
当飞机从平衡状态被扰动并试图返回时,由于其动量,它不可避免地会超过原始姿态,然后再次开始返回。这导致一系列振荡。
正动态稳定性是静态稳定性力随时间减小的状态。正动态稳定性是理想的。如果振荡随时间变小,飞机具有正动态稳定性(动态稳定)。
中性动态稳定性使飞机在平衡状态周围来回摆动,修正既不变大也不变小(动态中性)。中性动态稳定性是不理想的。
如果飞机随着每次振荡进一步偏离其原始姿态,它具有负动态稳定性。负动态稳定性导致静态稳定性力随时间增加(动态不稳定)。负动态稳定性极不理想。
飞机的整体设计对其在三个运动轴中每个轴上的稳定性(或缺乏稳定性)有贡献。
垂直尾翼(垂直安定面)是方向稳定性(偏航)的主要来源。
水平尾翼(水平安定面)是纵向稳定性(俯仰)的主要来源。
机翼是横向稳定性(滚转)的主要来源。
重心位置也影响稳定性。
如果重心接近其后限位置,飞机在俯仰和偏航方面都会较不稳定。
随着重心向前移动,稳定性增加。
尽管飞机在后重心时会较不稳定,但由于水平尾面的空气动力负载减少,它会具有一些理想的空气动力学特性。这种类型的飞机将有略低的失速速度,并且在给定功率设置下巡航速度更快。
机动性是飞机的品质,允许其容易地被操纵并承受这些机动施加的应力。
可控性是飞机响应飞行员控制的能力,特别是关于飞行路径和姿态。
如果飞机在俯仰受到扰动后(无论是由阵风还是飞行员对升降舵的位移引起)能够回到平飞状态,则它具有纵向稳定性。重心的位置和尾翼的有效性决定了纵向稳定性,从而决定了飞机的可控性。
增加任何轴上的稳定性:
-
降低机动性和可控性,以及
-
增加操纵杆(或踏板)力。
长周期振荡是一种长周期振荡,其中俯仰姿态、空速和高度变化,但攻角保持相对恒定。它是围绕某个平衡空速和高度的势能和动能的逐渐交换。经历纵向长周期振荡的飞机表现出正静态稳定性,飞行员可以轻松控制。
如果飞机具有静态横向稳定性,在机翼下垂后会回到水平位置。
大多数飞机的机翼具有正几何上反角(上反)。这是由机翼尖高于机翼根部产生的角度。如果左机翼在飞行中下垂,飞机会暂时开始向左侧滑,左机翼的有效攻角增加,右机翼的有效攻角减小。两翼攻角的变化将使机翼回到水平姿态。
后掠也有"上反效应"。这是一个副产品。机翼后掠是为了给飞机更高的 M C R I T \mathrm{M}_{\mathrm{CRIT}} MCRIT。后掠机翼的飞机不需要像直翼那样多的几何上反角。
一些飞机出于各种原因将机翼安装在机身顶部。同样作为副产品,高位机翼在侧滑期间由于机身和机翼周围的气流方向而产生"上反效应"。高位机翼的飞机不需要那么多的几何上反角。
具有高位后掠机翼的飞机将具有如此大的横向稳定性,以至于机翼通常被赋予下反角(负上反角)。
过大的静态横向稳定性可能导致动态不稳定性——荷兰滚。
静态方向稳定性是飞机机头朝向相对气流方向偏航的趋势。这是通过重心后方的龙骨面积大于重心前方的龙骨面积来实现的。
后掠翼也提供一定程度的静态方向稳定性。
过大的静态方向稳定性可能导致动态不稳定性——螺旋不稳定性。
静态横向稳定性和静态方向稳定性之间的相互作用。如果机翼下垂且飞机开始侧滑,方向稳定性将导致机头向相对气流方向偏航。
"上反效应"倾向于在机翼下垂时使飞机滚转,而方向稳定性导致机头向低翼方向偏航。
这两种力相互作用(耦合运动):
-
具有强静态方向稳定性和弱"上反效应"的飞机将倾向于螺旋不稳定性。
- 当机翼下垂时,机头将向低翼方向偏航,飞机开始转弯。转弯外侧机翼速度增加将增加坡度角,而升力垂直分量的减小将迫使机头进入低俯仰角。这将导致飞机进入下降螺旋。
-
具有强"上反效应"和弱方向稳定性的飞机将倾向于荷兰滚不稳定性。
马赫配平系统通过调整纵向配平来维持高马赫数下所需的操纵杆力梯度。马赫配平系统仅在高马赫数下工作。
问题
-
本质上稳定的飞机将:
a. 需要较少的控制努力。
b. 难以失速。
c. 不会进入螺旋。
d. 在任何干扰力移除后,具有返回原始状态的内在趋势。
-
在俯仰扰动后,飞机以增加的幅度在俯仰方向振荡。它是:
a. 静态和动态不稳定的。
b. 静态稳定但动态不稳定的。
c. 静态不稳定但动态稳定的。
d. 静态和动态稳定的。
-
纵向稳定性由以下提供:
a. 垂直尾翼。
b. 机翼上反角。
c. 水平尾翼。
d. 副翼。
-
飞机设计上反角是为了提供:
a. 围绕纵轴的横向稳定性。
b. 围绕横轴的纵向稳定性。
c. 围绕法向轴的横向稳定性。
d. 围绕法向轴的方向稳定性。
-
横向稳定性因以下因素减小:
a. 下反角增加。
b. 上反角增加。
c. 后掠角增加。
d. 机身和垂直尾翼面积增加。
-
如果机翼空气动力中心位于重心前方:
a. 升力变化产生的机翼俯仰力矩会减小升力变化。
b. 升力变化产生的机翼俯仰力矩会增加升力变化。
c. 升力变化不会导致机翼俯仰力矩变化。
d. 当飞机侧滑时,重心使机头转向侧滑方向,从而施加恢复力矩。
-
飞机的纵向静态稳定性:
a. 因机翼下洗效应而减小。
b. 因机翼下洗效应而增加。
c. 不受机翼下洗影响。
d. 对于机头上仰位移减小,但对于机头下俯位移因下洗效应而增加。
-
为确保飞行中具有一定程度的纵向稳定性,重心位置:
a. 必须始终与空气动力中心重合。
b. 必须位于中性点前方。
c. 必须位于中性点后方。
d. 不得位于后重心限制前方。
-
当重心接近前限位置时:
a. 产生俯仰所需的操纵杆力很小。
b. 纵向稳定性减小。
c. 由于飞机非常稳定,产生俯仰需要很大的操纵杆力。
d. 操纵杆力与后重心时相同。
-
静态裕度等于以下之间的距离:
a. 重心和空气动力中心。
b. 空气动力中心和中性点。
c. 重心和中性点。
d. 重心和重心基准点。
-
如果干扰力导致飞机滚转:
a. 机翼上反角将产生减小侧滑的滚转力矩。
b. 垂直尾翼将产生减小侧滑的滚转力矩。
c. 上反角将产生减小侧滑的偏航力矩。
d. 上反角将产生机头上仰的俯仰力矩。
-
放下襟翼时,横向稳定性:
a. 将因上反角的有效增加而增加。
b. 将因升力增加而增加。
c. 将因每个半翼的升力中心更接近机翼根部而减小。
d. 不会受到影响。
-
上反角通过以下方式提供稳定的滚转力矩,使升力增加:
a. 当飞机滚转时,上升机翼的升力增加。
b. 当飞机滚转时,下降机翼的升力增加。
c. 如果飞机侧滑,较低机翼的升力增加。
d. 无论何时飞机处于倾斜姿态,较低机翼的升力都会增加。
-
与无上反角的低翼构型相比,无上反角的高翼构型将提供:
a. 更大的纵向稳定性。
b. 与任何其他构型相同程度的纵向稳定性,因为上反角提供纵向稳定性。
c. 比低翼构型更小的横向稳定性。
d. 由于飞机侧滑时机身周围的气流模式增加了较低机翼的有效攻角,因此具有更大的横向稳定性。
-
在恒定指示空速下,高度增加对滚转阻尼有何影响?
a. 保持不变。
b. 因真空速增加而增加。
c. 因副翼效率降低而减小。
d. 因空气密度减小而减小。
-
机翼后掠将:
a. 不影响横向稳定性。
b. 减小横向稳定性。
c. 仅在高速时增加横向稳定性。
d. 在所有速度下增加横向稳定性。
-
在低前进速度时:
a. 来自机翼的增加下洗将使升降舵反应更灵敏。
b. 由于机翼攻角增加,空气将在机翼上方流动更快,提供更好的副翼控制。
c. 大侧滑角可能导致垂直尾翼失速。
d. 后掠翼将提供更高程度的纵向稳定性。
-
在横向扰动后,具有荷兰滚不稳定性的飞机将:
a. 进入螺旋俯冲。
b. 在滚转和偏航方向同时产生振荡。
c. 在俯仰方向产生振荡。
d. 产生不受控制的滚转。
-
要纠正没有自动保护系统的飞机上的荷兰滚:
a. 使用滚转输入。
b. 使用偏航输入。
c. 移动重心。
d. 将速度降至 M M O \mathrm {M}_{\mathrm {MO}} MMO以下。
-
偏航阻尼器:
a. 增加方向舵效率。
b. 在转弯前必须断开。
c. 增强稳定性。
d. 增加偏航率。
-
从根部到翼尖向下倾斜的机翼被称为具有:
a. 洗出。
b. 锥度。
c. 后掠。
d. 下反角。
-
飞机的横轴是一条:
a. 穿过翼尖的线。
b. 穿过压力中心,与气流方向成直角的线。
c. 穿过机翼根部四分之一弦点,与纵轴成直角的线。
d. 穿过重心,平行于穿过翼尖的线。
-
装载飞机使重心超过后限可能导致:
a. 纵向稳定性丧失,并在低速时机头上仰。
b. 尾部过度向上力,机头下俯。
c. 转弯时过度载荷系数。
d. 高操纵杆力。
-
飞机遭受荷兰滚不稳定性的趋势可通过以下方式减小:
a. 机翼后掠。
b. 机翼下反角。
c. 减小垂直尾翼尺寸。
d. 纵向上反角。
-
什么决定了飞机的纵向静态稳定性?
a. 推力和升力与重量和阻力的关系。
b. 水平安定面、方向舵和方向舵配平片的有效性。
c. 重心相对于空气动力中心的位置。
d. 升降舵能产生的俯仰力矩大小。
-
上反角是:
a. 主翼与纵轴之间的角度。
b. 主翼与法向轴之间测量的角度。
c. 四分之一弦线与水平基准线之间的角度。
d. 主翼相对于水平基准线向上和向外的倾斜角度。
-
围绕法向轴的稳定性:
a. 如果重心后方的龙骨面积增加则增加。
b. 由横向上反角提供。
c. 取决于纵向上反角。
d. 如果机翼没有后掠则更大。
-
如果发现飞机的重心在起飞限制范围内:
a. 重心将在着陆限制范围内。
b. 必须检查着陆时的重心,考虑到消耗的燃油。
c. 重心在飞行过程中不会改变。
d. 机组可以在飞行中调整重心,使其保持在着陆可接受的限制范围内。
-
副翼展开并在飞机达到小坡度角后回到中立位置。如果飞机随后在没有进一步控制移动的情况下回到平飞姿态,它是:
a. 中性稳定的。
b. 静态和动态稳定的。
c. 静态稳定,动态中性的。
d. 静态稳定的。
-
倾向于减小围绕任何轴的位移率,但仅在位移发生时起作用的特性被称为:
a. 稳定性。
b. 可控性。
c. 空气动力阻尼。
d. 机动性。
-
如果飞机装载使得改变速度所需的操纵杆力为零:
a. 重心位于中性点上。
b. 重心位于中性点后方。
c. 重心位于机动点上。
d. 重心位于前重心限制上。
关键事实 1(完整版)
稳定性是飞机在受到外部力干扰后,在没有飞行员帮助的情况下,回到稳定飞行状态的趋势。
稳定性有两大类别:静态和动态。
当所有力的总和为零且所有力矩的总和为零时,飞机处于平衡(配平)状态。
飞机所具有的静态稳定性类型是由其在移除某些干扰力后的初始趋势定义的。
静态稳定性的三种不同类型是:
a) 正静态稳定性存在于当飞机从平衡状态被干扰并有返回平衡状态的趋势时。
b) 中性静态稳定性存在于当飞机受到干扰,既没有返回的趋势,也没有继续向位移方向运动的趋势时。
c) 负静态稳定性存在于当飞机有继续沿干扰方向运动的趋势时。
纵轴从机头穿过重心到机尾。
法向轴"垂直地"穿过重心,与纵轴成90°角。
横向轴是一条穿过重心的线,平行于穿过机翼尖的线。
三个参考轴都穿过重心。
横向稳定性涉及绕纵轴的运动(滚转)。
纵向稳定性涉及绕横轴的运动(俯仰)。
方向稳定性涉及绕法向轴的运动(偏航)。
我们考虑由于攻角变化引起的升力大小变化,这种变化通过一个固定点作用;即空气动力中心。
空气动力中心(AC)位于25%弦长位置。
在正常攻角下,绕AC的负俯仰力矩保持恒定。
单独的机翼是静态不稳定的,因为AC位于重心的前方。
向上的垂直阵风将暂时增加机翼的攻角。通过AC作用的增加的升力大小将增加绕重心的正俯仰力矩。这是一个不稳定俯仰力矩。
尾翼的位置是为了产生绕飞机重心的稳定俯仰力矩。
如果尾部力矩大于机翼力矩,力矩总和将不为零,由此产生的机头向下力矩将导致绕重心的角加速度。
尾部力矩相对于机翼力矩越大,向原始平衡位置的回归率就越大。
通过将飞机重心向前移动,可以增加尾部力矩,这增加尾部力臂并减少机翼力臂。
如果机头向下(负)的尾部力矩大于机头向上(正)的机翼力矩,飞机将具有静态纵向稳定性。
当由于干扰导致尾部力矩和机翼力矩总和的变化为零时,重心的位置被称为中性点。
重心越靠前,绕重心的机头向下角加速度就越大——静态纵向稳定性的程度就越大。
重心位于中性点前方的距离将给出静态纵向稳定性的度量;这个距离被称为静态裕度。
静态裕度越大,静态纵向稳定性就越大。
后重心限制将位于中性点前方的某个距离处。
后重心限制和中性点之间的距离给出了所需的最小静态稳定性裕度。
如果飞机在俯仰、滚转和偏航方面的所有力矩等于零,则称其为配平。
配平(平衡)是控制的功能,可以通过以下方式实现:
a) 飞行员努力,
b) 配平片,
c) 在机翼油箱和位于后部的配平油箱之间移动燃油,或
d) 表面执行器的偏置(动力飞行控制)。
术语可控性指的是飞机响应控制面位移并达到所需飞行状态的能力。
高度的稳定性往往会降低飞机的可控性。
飞机的稳定趋势同样抵抗来自配平的位移,无论是通过控制器上的飞行员努力(操纵杆力)还是阵风。
如果重心向前移动,静态纵向稳定性增加,可控性减少(操纵杆力增加)。
如果重心向后移动,静态纵向稳定性减少,可控性增加(操纵杆力减少)。
当重心在前限位置时,静态纵向稳定性最大,可控性最小,操纵杆力高。
当重心在后限位置时,静态纵向稳定性最小,可控性最大,操纵杆力低。
后重心限制的设定是为了确保最小程度的静态纵向稳定性。
前重心限制的设定是为了确保在最差情况下最小程度的可控性。
关键事实 2(完成版)
正静态纵向稳定性表现为 C M C_{M} CM 对 C L \mathrm {C}_{\mathrm {L}} CL 的斜率为负。静态纵向稳定性的程度由曲线的斜率表示。
绕横向轴的净俯仰力矩是由各个组成表面在其适当的流场中作用的贡献造成的。
在大多数情况下,机身和发动机舱的贡献是不稳定的。
在高 C L C_{L} CL(低速)时,如果出现以下情况,静态稳定性可能会发生明显变化:
a) 飞机有后掠。
b) 有大量的"动力效应"贡献。
c) 在水平尾翼处有下洗的显著变化。
水平尾翼通常提供飞机所有组件中最大的稳定影响。(第259页)。
下洗降低静态纵向稳定性。
如果推力线位于重心下方,推力增加将产生正或机头向上力矩,其效果是不稳定的。
高升力装置倾向于增加尾部的下洗和减少尾部的动态压力,这两者都是不稳定的。
对于给定的俯仰速度,真空速增加会降低空气动力阻尼。
具有正机动稳定性的飞机应该表现出随着载荷系数或"g"的增加而稳定增加的操纵杆力。
操纵杆力梯度不能过于高,否则飞机将难以操纵且令人疲劳。同样,操纵杆力梯度也不能太低,否则在控制力轻微时飞机可能会无意中超负荷。
当飞机具有高静态稳定性时,机动稳定性将高,并且会产生高操纵杆力梯度。可以设置前重心限制以防止过高的机动操纵杆力梯度。随着重心向后移动,操纵杆力梯度随着机动稳定性的降低而降低,并且可能达到操纵杆力梯度的下限制。
在高高度,高真空速减少给定俯仰速度下尾部攻角的变化,并减少俯仰阻尼。因此,随着高度的增加,可以预期机动操纵杆力稳定性会降低。
飞行控制系统可能采用居中弹簧、下压弹簧或重力重物,以在飞机的速度、重心和高度范围内提供令人满意的控制力。
静态稳定性关注的是飞机回到平衡状态的初始趋势,而动态稳定性则由随时间变化的运动定义。
如果运动的振幅随时间减小,飞机将表现出正动态稳定性。
当无法获得自然空气动力阻尼时,必须提供人工阻尼以提供必要的正动态稳定性。
飞机的纵向动态稳定性通常由两种基本振荡模式组成:
a) 长周期(长周期振荡)
b) 短周期
长周期振荡发生时攻角基本保持恒定。
振荡周期如此之长,飞行员很容易抵消长周期振荡。
短周期振荡涉及攻角的显著变化。
短周期振荡不容易被飞行员控制。
由于减少空气动力阻尼,动态稳定性问题在高高度可能变得严重。
为了克服机身中的方向不稳定性,可以在整体设计中加入背或腹鳍。
垂直尾翼是飞机方向稳定性的主要来源。
T型尾使鳍更有效,因为它充当"端板"。
由于背鳍在更高的攻角下失速,它在大侧滑角下接管了鳍的稳定作用。
后掠产生方向稳定效果,随着 C L C_{L} CL 的增加而增加。
腹鳍增加了在高攻角下的方向稳定性。着陆间隙要求可能限制它们的尺寸,要求它们可收回,或者要求安装两个较小的腹鳍而不是一个大的。
通常,良好的操控品质是通过相对轻或弱正侧向稳定性获得的。
对飞机侧向稳定性贡献最大的主要表面是机翼。几何上反的效果对侧向稳定性有强大贡献。
低翼位置对静态侧向稳定性提供不稳定贡献。
高翼位置对静态侧向稳定性提供稳定贡献。
由翼的垂直位置贡献的"上反效应"的大小是大,并且可能需要低翼构型的明显上反角。另一方面,高翼位置通常不需要几何上反。
后掠后掠翼贡献了正的"上反效应"。
带有后掠翼的飞机比直翼需要更少几何上反。
鳍对纯侧向静态稳定性的贡献通常很小。
过度的"上反效应"可能导致"荷兰滚",在滚转机动中难以协调方向舵,或者在侧风起飞和着陆期间对侧向控制力提出极高要求。
部署部分跨度襟翼会产生减少的上反效应。
后掠翼比直翼需要少得多的几何上反。如果还要求将机翼安装在机身顶部,则会出现额外的"上反效应"。高位安装的后掠翼会产生过度的"上反效应",因此使用下反来将"上反效应"降低到所需水平。
当飞机处于侧滑状态时,侧向和方向响应将是耦合的,即侧滑将同时产生滚转和偏航力矩。
当静态方向稳定性与"上反效应"相比非常大时,将存在螺旋发散。
螺旋运动中的发散率通常非常缓慢,飞行员可以毫无困难地控制这种趋势。
当"上反效应"与静态方向稳定性相比大时,将发生荷兰滚。
发生荷兰滚的飞机配备有偏航阻尼器。这会自动偏转方向舵,与偏航速率成比例,以消除振荡。
如果偏航阻尼器在飞行中失效,建议飞行员使用副翼来消除荷兰滚。
如果飞行员使用方向舵,将导致飞行员诱导振荡(PIO),荷兰滚可能很快变得发散,导致失控。
当后掠翼飞机处于低 C L \mathrm {C}_{\mathrm {L}} CL 时,"上反效应"很小,可能会出现螺旋趋势。当后掠翼飞机处于高 C L C_{L} CL 时,"上反效应"增加,荷兰滚振荡趋势增加。
当遇到飞行员诱导振荡时,最有效的解决方案是立即释放控制。任何强行阻尼振荡的尝试只会继续激励并放大振荡。
高高度飞行常见的较高真空速减少攻角的变化并降低空气动力阻尼。
马赫俯冲是由于重心前方升力损失和尾部下洗减少引起的,这是由于在高马赫数下后掠翼上形成激波造成的。
马赫配平系统将调整纵向配平以维持所需的操纵杆力梯度,并且仅在高马赫数下运行。
答案
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| d | b | c | a | a | b | a | b | c | c | a | c |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| c | d | d | d | c | b | a | c | d | d | a | b |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
|---|---|---|---|---|---|---|
| c | d | a | b | b | c | a |


















 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











