










第12章:飞行力学基础
目录
- 引言
- 直线水平稳定飞行
- 尾翼和升降舵
- 直线稳定爬升
- 爬升角
- 重量、高度和温度的影响
- 带动力下降
- 紧急下降
- 滑翔
- 滑翔下降率
- 转弯
- 非对称推力飞行
- 最小控制速度总结
- 问题
- 答案
引言
飞行力学是研究作用于飞行中的飞机上的力及飞机对这些力的反应。对于处于稳定(无加速度)飞行状态的飞机,必须满足以下条件:
-
向上的力必须与向下的力完全平衡,
-
向前的力必须与向后的力完全平衡,以及
-
所有力矩的总和必须为零。
这种状态被称为平衡状态。
直线水平稳定飞行
在直线平飞中,作用于飞机上的四个力是:升力、重力、推力和阻力,如图12.1所示。
重力通过飞机重心(CG)垂直向下作用于地球中心。或者,重力也可以定义为与重力方向平行的力。
升力通过压力中心(CP)垂直(90°)于飞行路径作用。
就本章而言(虽然并非严格正确),推力沿飞行路径方向向前作用,阻力沿飞行路径方向向后作用。
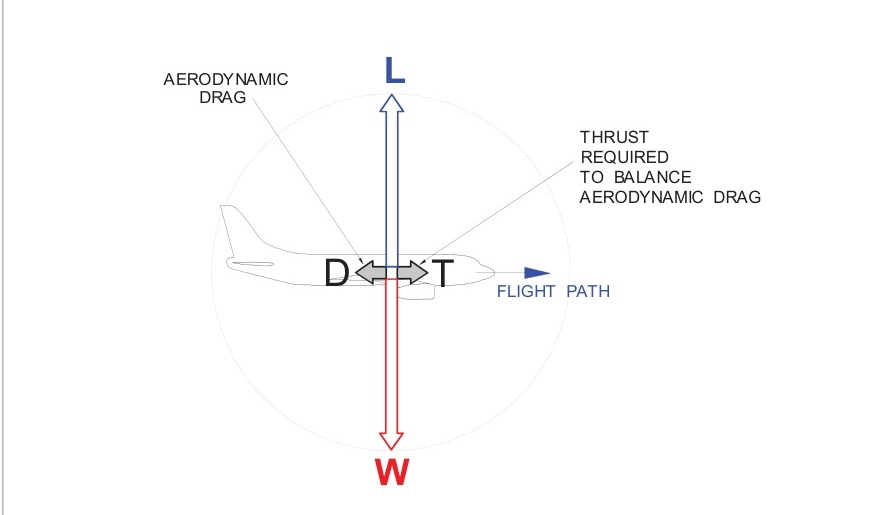
为使飞机处于稳定平飞状态,必须存在平衡条件。这种无加速度的飞行状态是通过调整飞机使升力等于重力,并设置油门使推力等于阻力来实现的。可以说,对于平飞,相对的力必须相等。
大多数现代飞机的升阻比在10到20比1之间。也就是说,升力是阻力的10到20倍。
推力和阻力的作用线非常接近,因此这对力偶的力矩很小,在本研究中可以忽略。压力中心和重心的位置是可变的,在大多数平飞条件下它们不重合。压力中心随着攻角的增加而向前移动,重心随着燃油减少而移动。通常,在低速时压力中心位于重心前方,产生抬头力矩,而在高速时位于重心后方,产生低头力矩。
尾翼和升降舵
尾翼的功能是通过提供必要的力来抵消由压力中心和重心移动产生的任何俯仰力矩,从而维持平衡。如图12.2所示,在正常巡航时,当压力中心位于重心后方时,尾翼必须提供向下的力。
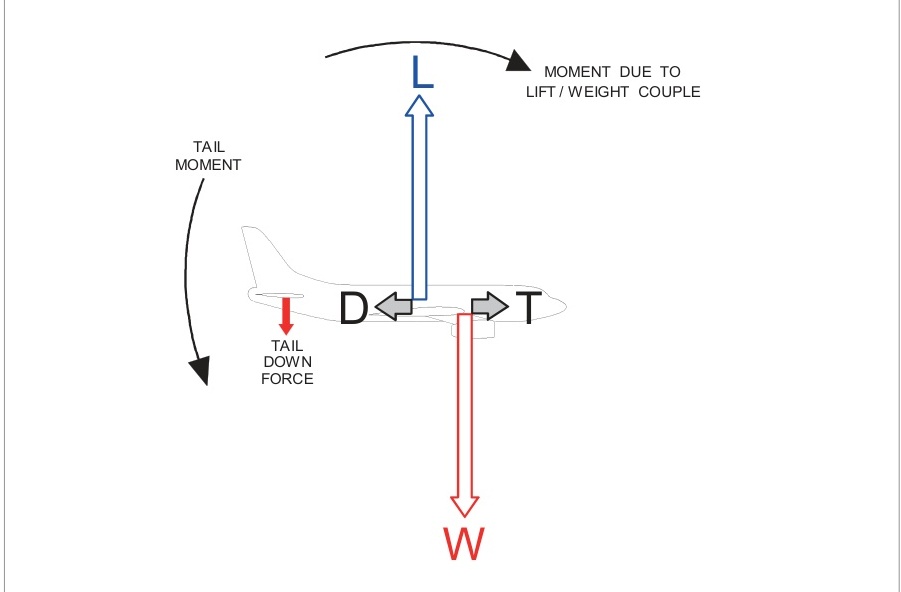
力的平衡
如果尾翼产生平衡力,这将增加或减少升力。
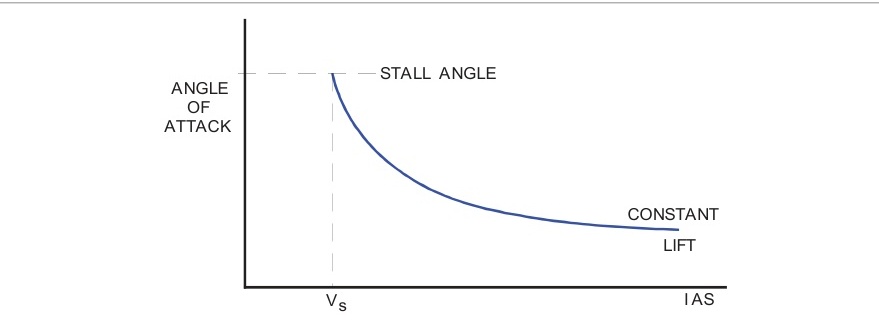
对于恒重的稳定平飞,所需的升力将保持恒定。在稳定速度下,机翼将在给定攻角下提供这一升力。然而,如果速度改变,攻角必须改变以保持相同的升力。由于升力与速度的平方成正比,但与攻角成正比,因此攻角将如图12.3所示变化以提供恒定的升力。
对于恒速的稳定平飞,推力必须等于阻力。阻力随速度增加(高于 V M D V_{MD} VMD),因此要保持更高的速度,必须通过打开油门来增加推力。
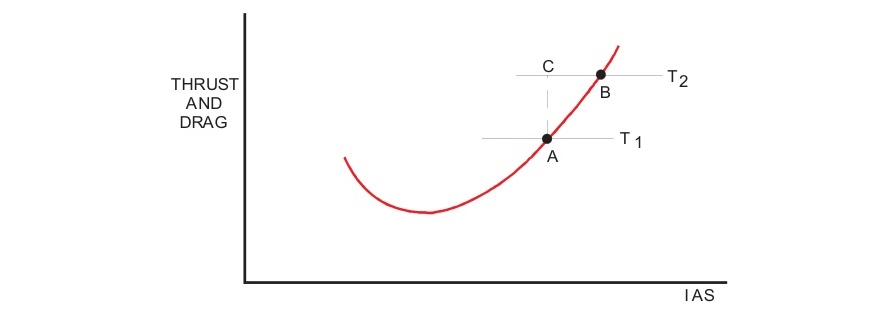
要以点A的速度飞行,图12.4,需要 T 1 T_1 T1的推力,而要以点B的速度飞行则需要 T 2 T_2 T2的推力。如果当飞机在点A时,推力从 T 1 T_1 T1增加到 T 2 T_2 T2,推力将大于阻力,飞机将按照"过剩"推力AC的比例加速,直到达到点B,此时推力和阻力再次相等。如果 T 2 T_2 T2是油门全开时可获得的推力,那么B点的速度就是平飞中可达到的最大速度。
直线稳定爬升
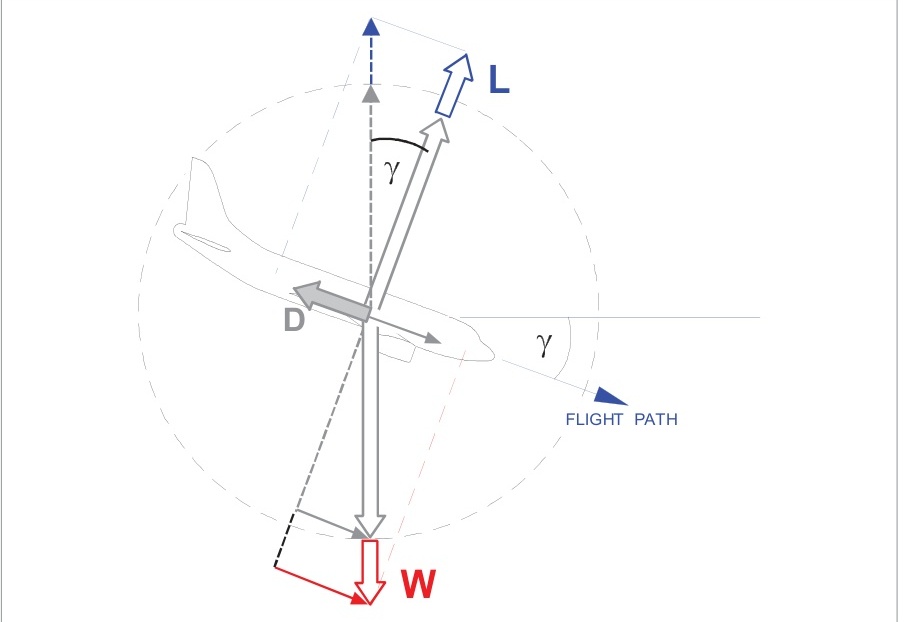
考虑一架沿与水平面成角度(γ)的直线飞行路径进行直线稳定爬升的飞机。γ(伽马)是用于爬升角的符号。作用于飞机上的力包括:垂直于飞行路径的升力;平行于飞行路径的推力和阻力;以及平行于重力方向的重力。这个力系统如图12.5所示。
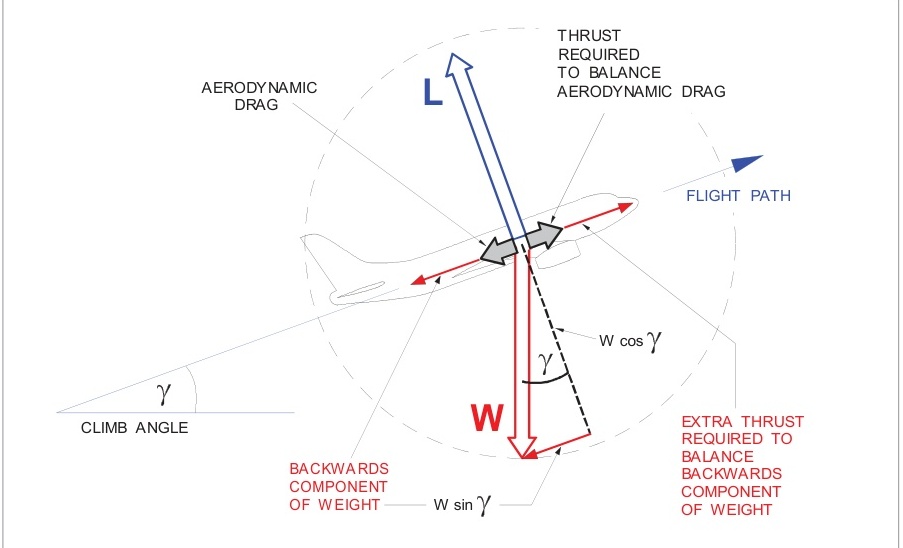
重力分解为两个分量:一个与升力相反(W cos γ),另一个沿飞行路径向后与阻力方向相同(W sin γ)。平衡的要求是:推力必须等于阻力加上重力的向后分量;升力必须等于与之相对的重力分量。对于更大爬升角的平衡,所需的升力将减少,而重力的向后分量将增加。
L = W cos γ L=W\cos γ L=Wcosγ
T = D + W sin γ T=D+W \sin γ T=D+Wsinγ
在直线稳定爬升中,升力小于重力,因为升力只需支撑重力的一部分,这一比例随着爬升角的增加而减少。(在垂直爬升中不需要升力)。重力的剩余部分由发动机推力支撑。
可以看出,对于直线稳定爬升,所需的推力大于阻力。这是为了平衡沿飞行路径作用的重力向后分量。
sin γ = T − D W \sin γ=\frac{T-D}{W} sinγ=WT−D
飞机爬升的能力取决于超额推力,即在克服空气动力阻力后可用的推力。对于给定的推力,阻力越小,爬升能力越强。收起襟翼时阻力会减小,从而提供更大的爬升角(改善爬升梯度)。
爬升角
爬升角取决于"超额推力"(T-D)和重量。由于推力和阻力都随指示空速变化,超额推力在某一特定速度下最大。这就是最大爬升角速度 V x V_x Vx。(对于螺旋桨飞机的情况,见图12.28)。
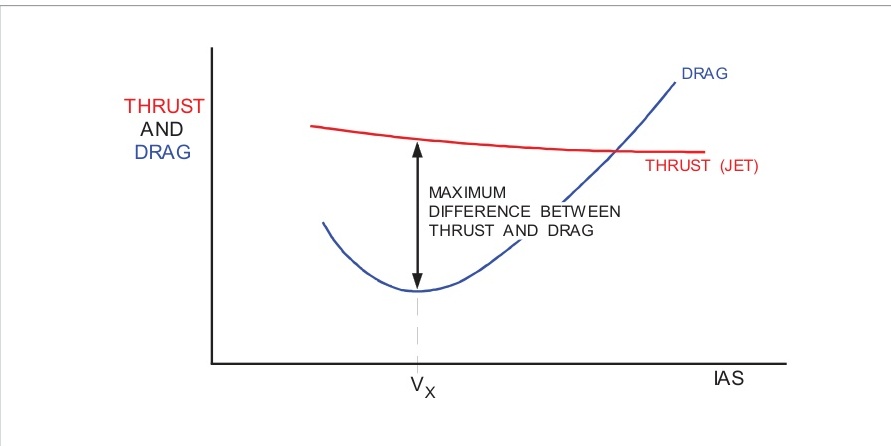
推力随速度的变化将取决于发动机类型。对于推力随速度相对恒定的喷气发动机, V x V_x Vx将接近 V M D V_{MD} VMD,但对于螺旋桨发动机飞机, V x V_x Vx通常低于 V M D V_{MD} VMD。
重量、高度和温度的影响
在给定指示空速下,飞机的阻力不受高度或温度影响,但更高的重量将增加阻力并减少超额推力,从而减小爬升角。
发动机可用推力随高度和温度的增加而减少,这也减少了超额推力。因此,爬升角随着重量、高度和温度的增加而减小。
带动力下降
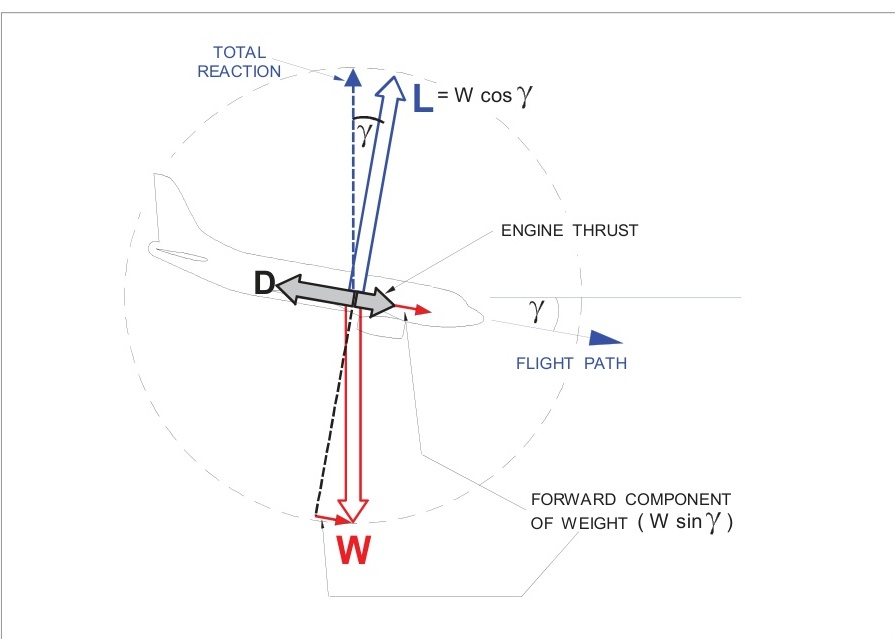
图12.7说明了稳定带动力下降中力的分布。重力分为两个分量。一个分量(W cos γ)垂直于飞行路径,由升力平衡,而另一个分量(W sin γ)沿飞行路径向前作用,"增加"推力以平衡阻力。如果在保持恒定推力设置的情况下降低飞机机头,沿飞行路径向前作用的重力分量增加将导致指示空速增加。增加的指示空速将导致阻力增加,最终平衡增加的向前重力,重新建立平衡。
如果关闭油门,推力消失,必须提供更大的重力向前分量来平衡阻力并保持恒定的指示空速。这是通过降低飞机机头来增加下降角(γ)实现的。
-
在下降中,升力小于重力。这是因为升力只需平衡垂直于飞行路径的重力分量(W cos γ)。
-
在下降中,推力小于阻力。这是因为重力在与推力相同的方向上提供了向前分量(W sin γ)。
紧急下降
在高空客舱增压失效的情况下,需要尽快下降。下降率可通过以下方式增加:
-
关闭油门减少推力。
-
通过以下方式增加阻力:
-
展开减速板,
-
放下起落架(在 V L O V_{LO} VLO或以下)
-
-
通过降低机头增加速度。在干净构型下,速度可以增加到 M M O M_{MO} MMO或 V M O V_{MO} VMO(取决于高度),或者如果起落架放下,则增加到起落架展开限制速度( V L E V_{LE} VLE)。
如果放下起落架(产生大量阻力),总体下降率会更高,但如果起落架操作限制速度( V L O V_{LO} VLO)远低于巡航速度,飞机必须在放下起落架前减速(可能需要几分钟的平飞)。因此,初始下降率将相对较低,在高空停留的时间将延长。
如果不放下起落架,可以关闭油门,展开减速板并降低机头,立即将飞机加速到 M M O / V M O M_{MO}/V_{MO} MMO/VMO,提供更高的初始下降率,使乘客迅速下降到较低高度。
在高空,限制速度将是 M M O M_{MO} MMO,如果以这个马赫数进行紧急下降,指示空速将增加。在某个高度,指示空速将达到 V M O V_{MO} VMO,此时必须抬高机头以避免在剩余下降过程中超过 V M O V_{MO} VMO。
紧急下降期间可能的下降率相当高,因此当接近所需的平飞高度时,应逐渐减小下降率,以便平稳过渡回平飞状态。
滑翔
在无推力滑翔中,沿飞行路径的重力分量必须提供推进力并平衡阻力。在滑翔中,只有三个力作用于飞机:升力、重力和阻力。
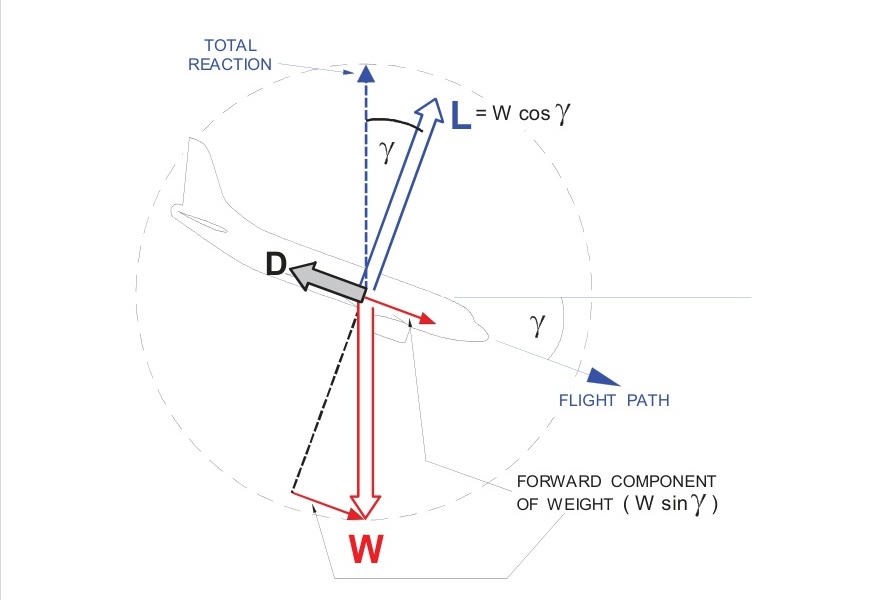
图12.8显示了稳定滑翔中力的分布。重力的向前分量(W sin γ)是下降角(γ)的产物;下降角越大,重力的向前分量越大(与图12.7比较)。重力的向前分量必须平衡阻力,使飞机处于稳定滑翔状态。由此可见,如果阻力减小而升力保持不变,所需的力平衡可以在较小的下降角下实现。
滑翔中的下降角
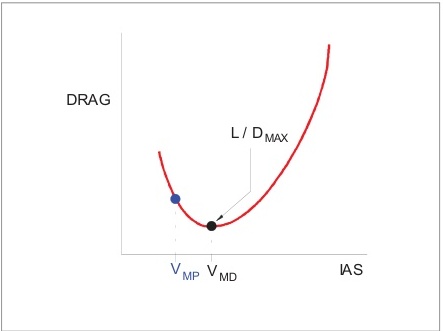
滑翔角仅是升阻比的函数。当升阻比最大时,下降(滑翔)角将最小。升阻比在最佳攻角时最大,这也对应于最小阻力速度( V M D V_{MD} VMD),图12.10。在高于或低于 V M D V_{MD} VMD的速度下,滑翔角将更陡。
滑翔中的最大距离可以在飞机以 L / D M A X L/D_{MAX} L/DMAX( V M D V_{MD} VMD)飞行时实现。
重量的影响
L / D M A X L/D_{MAX} L/DMAX与重量无关。只要飞机以其最佳攻角飞行,无论重量如何,滑翔角和滑翔距离将相同。然而,对应于最佳攻角的速度( V M D V_{MD} VMD)将随重量变化。随着重量增加, V M D V_{MD} VMD增加。
如图12.9所示,更高的重量将提供增加的重力向前分量,飞机将加速到更高的 V M D V_{MD} VMD。随着飞机加速,升力增加,阻力将增加,直到平衡增加的重力向前分量。平衡现在在相同的 L / D M A X L/D_{MAX} L/DMAX下重新建立,但指示空速更高。
在更高的重量下,飞机将滑翔相同的距离,但速度更高,因此下降率增加。
风的影响
滑翔角将决定飞机在给定高度变化下可以滑翔的距离。
滑翔距离 = 高度损失 × 升力 ( L ) 阻力 ( D ) 滑翔距离=高度损失×\frac{升力(L)}{阻力(D)} 滑翔距离=高度损失×阻力(D)升力(L)
这个距离只能在静止空气中实现。如果有风,地速将改变,因此地面距离也将改变。在逆风中,地面距离将减少,在顺风中将增加。
构型的影响
飞机的最大升阻比将在干净构型下获得。展开襟翼、扰流板、减速板或起落架等将减少 L / D M A X L/D_{MAX} L/DMAX并产生更陡的滑翔角,从而减少滑翔距离。
滑翔下降率
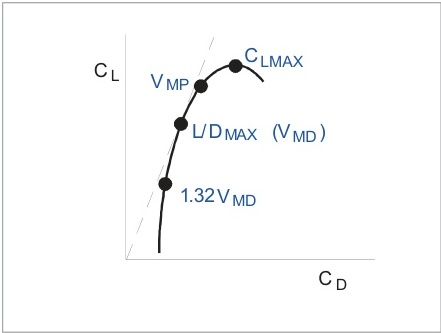
滑翔中的最小下降率在产生最小所需功率的指示空速( V M P V_{MP} VMP)下获得。在滑翔中以 V M P V_{MP} VMP飞行将使飞机能够尽可能长时间地保持在空中。如图12.10所示, V M P V_{MP} VMP比 V M D V_{MD} VMD慢。风速和方向对下降率没有影响。一种常用的显示 V M D V_{MD} VMD和 V M P V_{MP} VMP关系的方法是使用"整机 C L / C D C_L/C_D CL/CD极曲线",如图12.11所示。
转弯
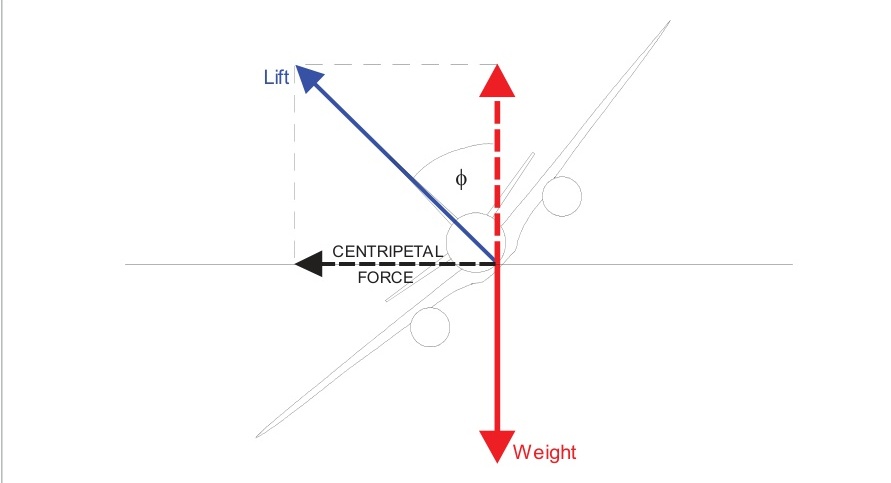
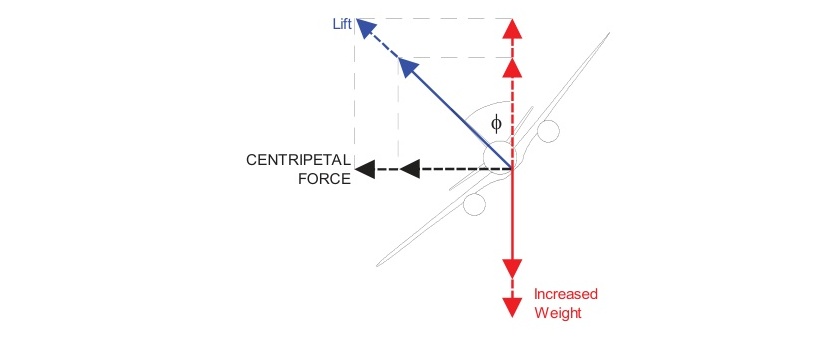
为使飞机改变方向,需要一个力将其偏向转弯中心。这被称为向心力,图12.12。倾斜飞机使升力倾斜。正是升力的水平分量导致飞机转弯。如果飞机倾斜而攻角保持不变,升力的垂直分量将太小而无法平衡重力,飞机将开始下降。
随着倾斜角的增加,必须增加攻角以产生更大的总升力。垂直分量必须足够大以维持平飞,而水平分量必须足够大以产生所需的向心力。
重量对转弯的影响
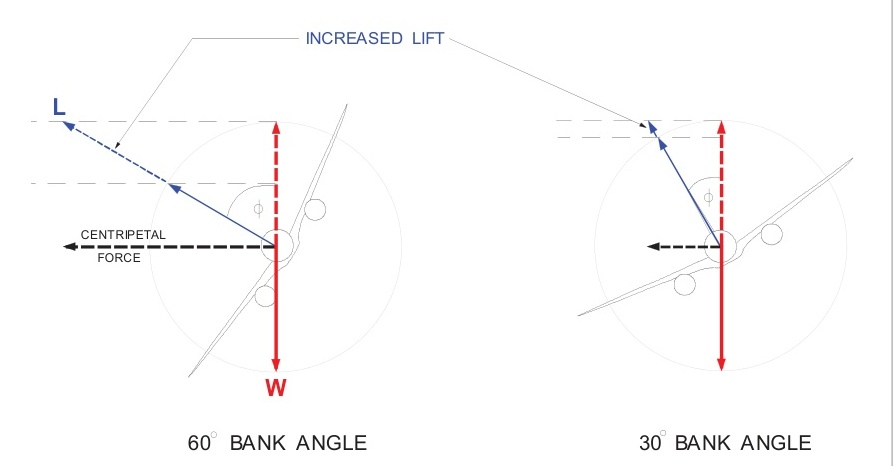
在稳定平飞转弯中,如果忽略推力,升力提供平衡重力的力和转弯飞机的向心力。如果能够获得相同的真空速和倾斜角,转弯半径基本上与重量或飞机类型无关。
并非所有飞机都能在相同的真空速下达到相同的倾斜角。如果重量增加,所需的升力垂直分量增加,但维持相同转弯半径的向心力也按相同比例增加。所需的升力虽然更大,但与垂直方向的倾斜度与之前相同,倾斜角也相同,图12.13。
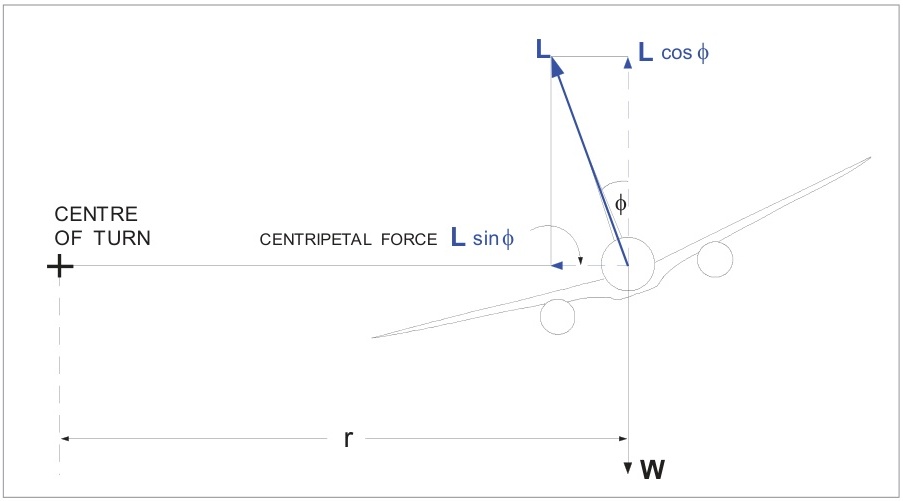
在稳定水平转弯中,图12.14,平衡条件可以表示为:
L cos φ = W ————(公式12.1) \text{L}\cos φ=\mathrm{W}————\text{(公式12.1)} Lcosφ=W————(公式12.1)
L sin φ = W V 2 r g ————(公式12.2) \text{L}\sin φ=\frac{\mathrm{WV}^{2}}{\mathrm{rg}} ————\text{(公式12.2)} Lsinφ=rgWV2————(公式12.2)
其中(L)是机翼升力(牛顿),(W)是飞机重量(牛顿),(V)是真空速(米/秒),®是转弯半径(米),φ是倾斜角,(g)是重力加速度常数9.81米/秒²。
将公式2除以公式1,得到:
tan φ = V 2 r g ————(公式12.3) \tan φ=\frac{V^{2}}{rg} ———— \text{(公式12.3)} tanφ=rgV2————(公式12.3)
这是关联(V)、®和φ的基本转弯公式。一旦知道这三个变量中的两个,就可以确定第三个。从公式3,转弯半径为:
转弯半径 = V 2 g tan φ \color{red}{\text{转弯半径} = \frac{V^2}{g \tan φ}} 转弯半径=gtanφV2
相应的转弯率(=V/r)为:
转弯率 = g tan φ V 弧度/秒 \text{转弯率}=\frac{g\tan φ}{V} \text{ 弧度/秒} 转弯率=Vgtanφ 弧度/秒
转弯率是航向变化率或转弯的角速度。它可以表示为每分钟度数,或以率数表示。
1率转弯是每分钟180°(每秒3°)
2率转弯是每分钟360°(每秒6°)
转弯率与真空速成正比,与转弯半径成反比。
转弯率 = T A S 半径 \color{red}{\text{转弯率} = \frac{\mathrm{TAS}}{\text{半径}}} 转弯率=半径TAS
例如:以150节真空速(77米/秒)飞行的飞机,执行半径为1480米的转弯,其转弯率为:
77 1480 = 0.052 弧度 / 秒 \frac{77}{1480}=0.052\text{弧度}/\mathrm{秒} 148077=0.052弧度/秒
一个圆有2π弧度, 360 6.286 = 57.3 ° \frac{360}{6.286}=57.3° 6.286360=57.3°每弧度
0.052 × 57.3 = 3 ° 每秒(1率) 0.052 \times 57.3=3°\text{每秒(1率)} 0.052×57.3=3°每秒(1率)
-
在恒定真空速下,增加倾斜角会减小转弯半径并增加转弯率。
-
要保持恒定转弯率,增加速度需要增加倾斜角。
-
在恒定倾斜角下,增加速度会增加转弯半径并减小转弯率。
| 在恒定率转弯中,倾斜角取决于真空速 |
转弯半径和转弯率
两个变量决定转弯率和转弯半径:
-
倾斜角(φ)。更陡的倾斜减小转弯半径并增加转弯率,但产生更高的载荷系数。
-
真空速(TAS):减小速度减小转弯半径并增加转弯率,而不增加载荷系数。
在任何给定倾斜角(φ)下,转弯半径与真空速的平方成正比:
半径 = V 2 g tan φ \text{半径}=\frac{V^{2}}{g\tan φ} 半径=gtanφV2
如果速度加倍,在恒定倾斜角下,转弯半径将增加四倍。
要理解在速度加倍时转弯半径和转弯率之间的关系,考虑:
转弯率 = V 半径 \text{转弯率}=\frac{V}{\text{半径}} 转弯率=半径V
转弯率 = V ( × 2 ) 半径 ( × 4 ) = 1 2 \text{转弯率}=\frac{V(\times 2)}{\text{半径}(\times 4)}=\frac{1}{2} 转弯率=半径(×4)V(×2)=21
如果速度加倍,在恒定倾斜角下,转弯率将是之前的一半。
由于转弯率在任何给定倾斜角下随真空速变化,因此较慢的飞机比较快的飞机在相同倾斜角下完成转弯所需的时间和区域更少,图12.15。
特定的倾斜角和真空速将产生相同的转弯率和半径,无论重量、重心位置或飞机类型如何。从图12.15还可以看出,增加速度会增加转弯半径并减小转弯率。载荷系数保持不变,因为倾斜角没有改变。
要增加转弯率并减小转弯半径,可以增加倾斜角和/或减小速度。
给定的真空速和倾斜角将在任何飞机中产生特定的转弯率和半径。在协调的水平转弯中,空速增加将增加半径并减小转弯率。载荷系数与倾斜角直接相关,因此在任何速度下,给定倾斜角的载荷系数相同。
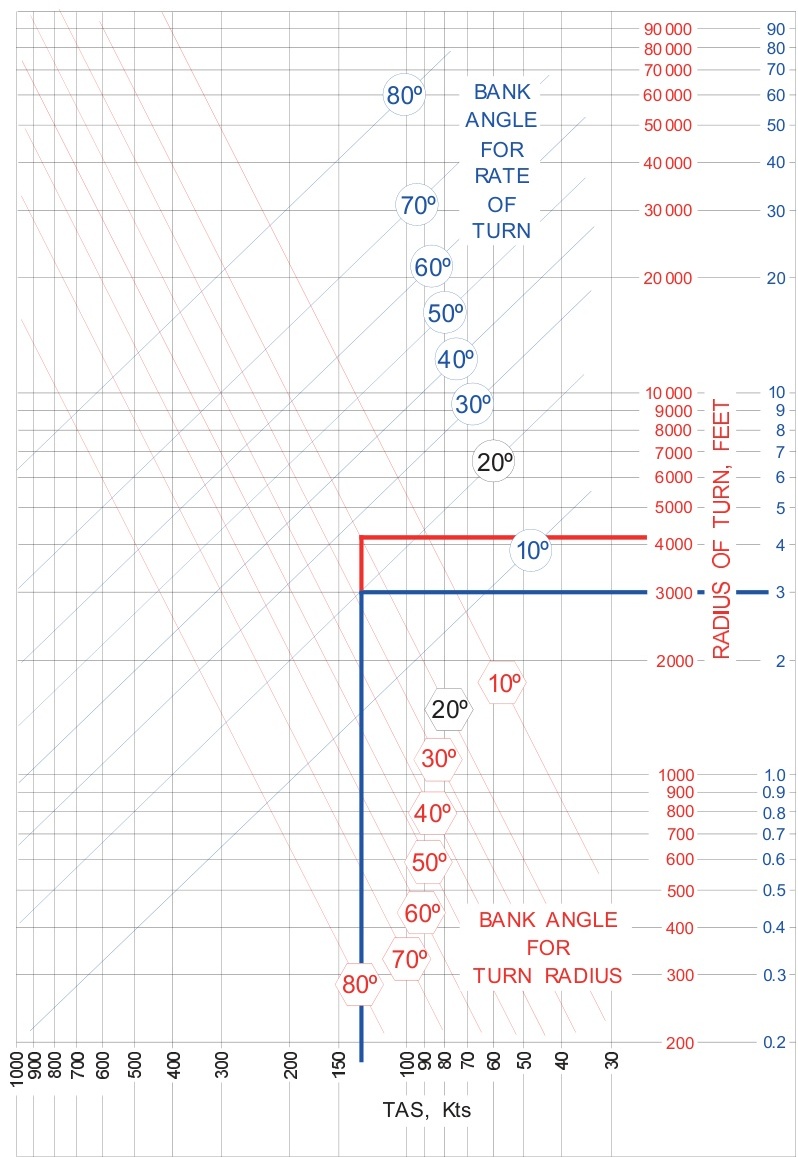
(仅供说明)。此图适用于任何飞机。示例显示,对于以130节真空速和20°倾斜角进行的转弯,半径将为4200英尺,转弯率为每秒3°。在260节真空速下,半径将为16800英尺,转弯率为每秒1.5°。
转弯中的载荷系数
当飞机处于倾斜转弯中时,必须增加升力以保持升力的垂直分量等于重力,图12.16。
这种关系可以表示为:
载荷系数 ( n ) = L W = 1 cos φ = sec φ \text{载荷系数} (n)=\frac{L}{W}=\frac{1}{\cos φ}=\sec φ 载荷系数(n)=WL=cosφ1=secφ
参见第7章获取完整的三角函数解释。
图12.17显示了载荷系数与倾斜角之间的关系。此图对任何飞机都有效。可以看出,载荷系数(n)随倾斜角以递增的速率增加。
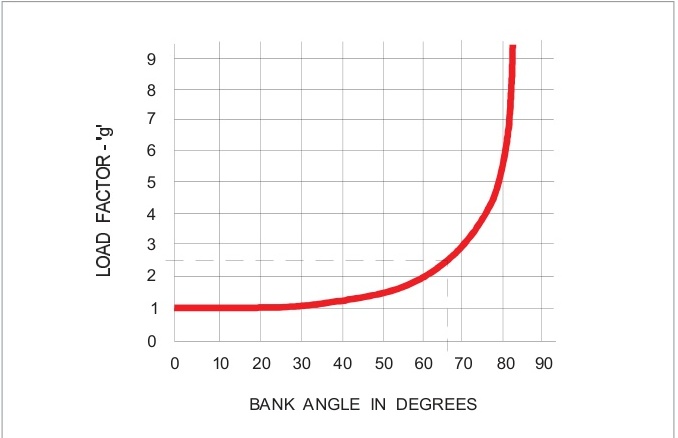
转弯的’g’限制
每种飞机都有设计限制载荷系数。对于现代高速喷气式运输机,正限制载荷系数为2.5g。从图12.17可以看出,这将在67°倾斜角时发生,这将根据真空速确定转弯半径。如果不超过强度限制,这将是该’g’值下允许的最小半径。
转弯的失速限制
如果保持速度恒定,但增加倾斜角,则必须增加攻角以提供所需的增加升力。最终将达到失速角,无法进一步增加倾斜角(和减小转弯半径)。由于失速速度随重量变化,这一边界将是重量的函数。
转弯的推力限制
在转弯过程中,升力必须大于平飞时的升力,这将导致诱导阻力增加。为了平衡这种额外的阻力,转弯时需要比同速平飞时更大的推力。倾斜角越大,所需的推力就越大,最终油门将完全打开。此时无法进一步增加倾斜角(和减小转弯半径)。推力边界和强度边界的相对位置将取决于限制载荷系数和可用推力。
最小转弯半径
如果可用推力足够,最小转弯半径出现在失速限制和强度限制的交叉点。这一点的速度是 V A ′ V_{A^{\prime }} VA′,即最大机动速度。飞机越重,最小转弯半径越大。
转弯协调
副翼反向偏航、发动机扭矩、螺旋桨陀螺进动、不对称推力和螺旋滑流都可能导致不协调飞行。当飞机处于侧滑状态时,存在不协调飞行。侧滑的指示通过转弯协调仪的倾斜计部分(小球)提供给飞行员,图12.18。微型飞机模型指示转弯率。
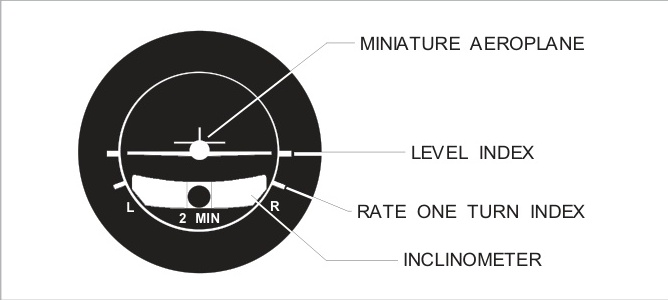
通过使用方向舵保持小球在参考线之间居中来维持协调飞行。为此,在小球偏转的一侧施加方向舵压力。简单的规则"踩小球"是记住使用哪个方向舵的有用方法。
如果在转弯过程中副翼和方向舵协调,小球将保持居中,不会有侧滑。如果飞机侧滑,小球会偏离管子的中心。向转弯中心侧滑会使小球移向转弯内侧。向转弯外侧侧滑会使小球移向转弯外侧。要纠正这些情况并保持协调飞行,“踩小球”。倾斜角也可以调整以帮助从侧滑恢复到协调飞行。以下图示提供了示例。

图12.19显示飞机在向右做1级协调转弯。

图12.20显示飞机在向右做不协调转弯;它将向转弯中心侧滑(滑转)。使用"踩小球"规则,可以通过施加右方向舵压力使小球居中来协调转弯。

图12.21也显示飞机在向右做不协调转弯;它将向转弯外侧侧滑(滑转)。使用"踩小球"规则,可以通过施加左方向舵压力来协调转弯。
不对称推力飞行
简介
当多发飞机的一个发动机失效时,失效发动机一侧的推力将减少,阻力将增加:
-
空速将下降
-
机头将下降,以及
-
最显著的是,将立即产生向失效(停转)发动机方向的偏航力矩。
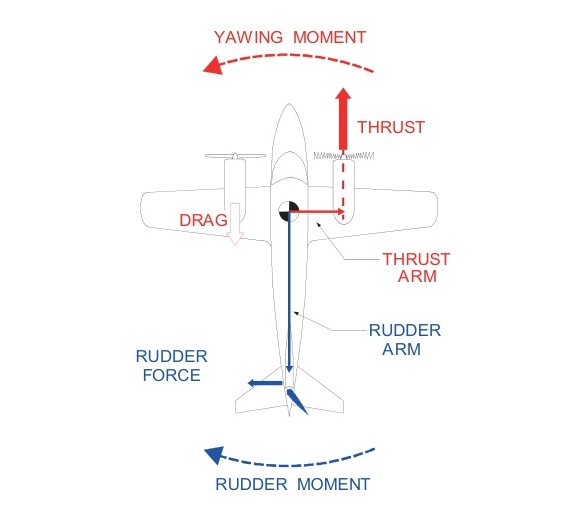
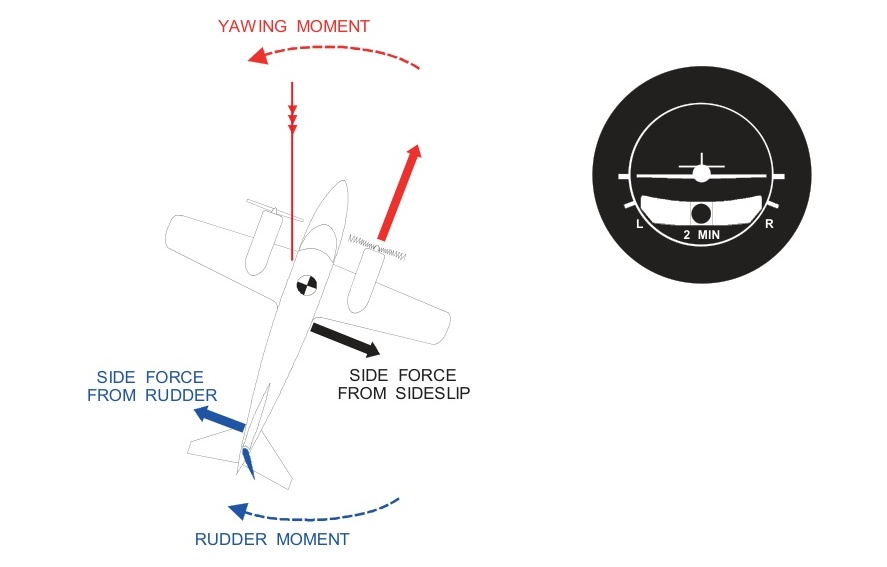
图12.22显示了左发动机失效后作用于飞机的力和力矩。飞机有一个向停转发动机偏航的力矩。飞行员已使用方向舵阻止偏航。发动机失效时的关键动作是阻止偏航!
偏航力矩
偏航力矩是工作发动机产生的推力乘以推力线与重心之间的距离(推力臂),加上失效发动机产生的阻力乘以发动机中心线与重心之间的距离。偏航力矩的强度将取决于:
-
工作发动机产生的推力大小(油门设置和密度高度)。
-
推力线与重心之间的距离(推力臂)。
-
失效发动机产生的阻力大小。
平衡偏航力矩的方向舵力矩是方向舵力乘以垂直尾翼压力中心与重心之间的距离(方向舵臂)的结果。这一说法将受到尚未引入的因素的修改。因此,在这一初步阶段,飞行员抵消不对称推力引起的偏航力矩的能力将取决于:
-
方向舵偏转(影响方向舵力)。
-
重心位置(影响方向舵臂)。
-
指示空速(影响方向舵力)。
假设方向舵处于全偏转状态,重心位于后限(最短方向舵臂),指示空速(动压)刚好足以使方向舵力产生的方向舵力矩等于偏航力矩 - 将不会有偏航。但指示空速的任何减少都会导致飞机不可控地向失效发动机偏航。在这个例子中,向左的不可控偏航将导致飞机因右翼产生更大的升力而不可控地向左滚转。飞机将进入向左的螺旋俯冲(仅靠飞行控制无法停止);如果靠近地面,将导致灾难。在这些靠近地面的极端情况下,恢复对飞机控制的唯一方法是关闭工作发动机的油门。这样可以消除偏航力矩,飞机可以在控制下强制着陆。
因此,多发飞机在发动机失效后保持方向控制的最低指示空速称为 V M C V_{MC} VMC(最小控制速度)。
临界发动机
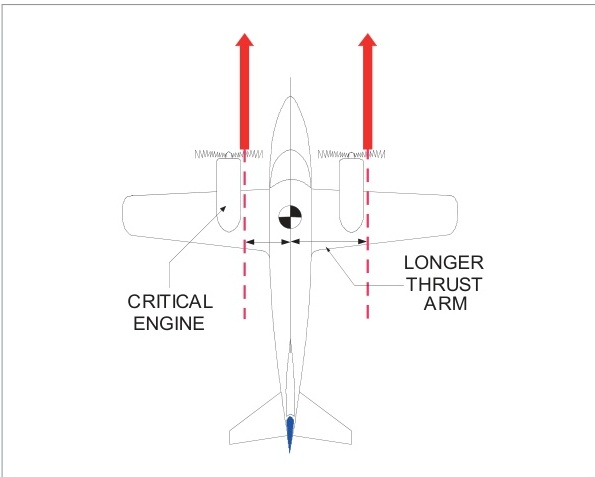
影响多发飞机发动机失效后偏航力矩的因素之一是推力臂的长度(从重心到工作发动机推力线的距离)。
对于螺旋桨发动机飞机,推力臂的长度由螺旋桨的不对称效应决定。在正攻角下,从后方看,顺时针旋转的螺旋桨的推力线向发动机中心线右侧偏移。这是因为下行叶片产生的推力大于上行叶片(第16章)。如果两个发动机都顺时针旋转,右发动机将比左发动机有更长的推力臂。
如果左发动机失效,右发动机的推力通过更长的推力臂作用,将产生更大的偏航力矩;需要更高的指示空速( V M C V_{\mathrm {MC}} VMC)来保持方向控制。因此,在给定的指示空速下,如果左发动机失效,情况将更为严重,图12.23。
临界发动机是指失效后会产生最大偏航力矩的发动机。
为了克服小型双发飞机有临界发动机的缺点,它们的发动机可能设计为反向旋转。这意味着左发动机顺时针旋转,右发动机逆时针旋转,使两个发动机都有尽可能小的推力臂。较大的涡轮螺旋桨飞机(如King Air等更大型号)的发动机旋转方向相同。对于四发喷气式飞机,临界发动机是任一外侧发动机。
注意:如果多发飞机上的所有螺旋桨都以相同方向旋转,它们有时被称为"同向旋转"螺旋桨。
平衡偏航力矩和力
虽然图12.22中的力矩是平衡的,但力并不平衡。因此,飞机不处于平衡状态,在这种情况下会向左漂移。方向舵产生的不平衡侧向力可以通过两种方式平衡:
-
保持机翼水平,或
-
稍微向工作发动机方向倾斜(首选方法)。
使用方向舵阻止偏航 - 机翼水平
方向舵用于防止偏航,副翼保持机翼水平。向工作发动机偏航会在龙骨表面产生与方向舵力相反的侧滑力,图12.24。如果侧滑角过大,垂直尾翼可能失速。转弯指示器将居中,侧滑指示器也将居中。
注意:不对称推力是飞行员通过倾斜计中小球居中来指示协调飞行规则的例外。
这种平衡方向舵侧向力的方法会因产生过多的有害阻力而降低爬升性能,因此不是关键情况(如起飞后或复飞时发动机失效)的推荐方法。
平衡力的"机翼水平"方法的唯一优点是飞行员可以获得强烈的视觉水平参考,包括飞机内部和外部。
缺点是如果侧滑角过大,垂直尾翼可能失速,而且由于过多的有害阻力,爬升能力会降低。
使用方向舵阻止偏航 - 向工作发动机倾斜
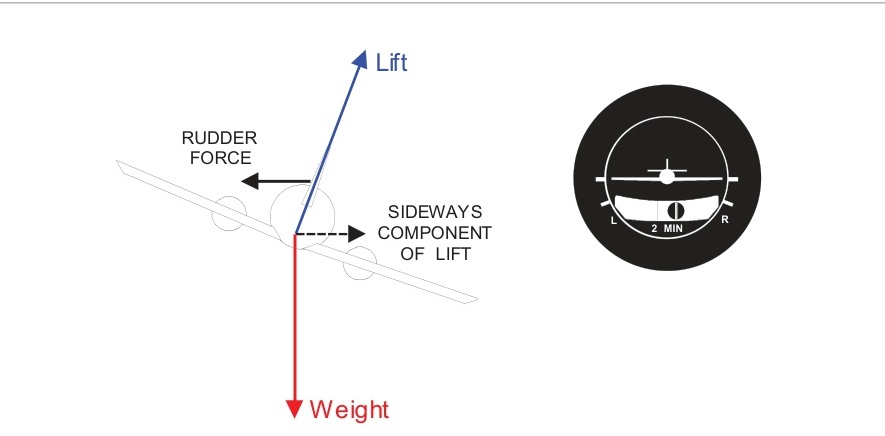
从空气动力学角度看,通过向工作发动机倾斜来平衡方向舵侧向力更为有效,图12.25,这样升力会产生与方向舵力相反的侧向分量。倾斜角不得超过 5 ∘ 5^{\circ } 5∘,以防止升力垂直分量过度损失。
向工作发动机倾斜还可以减少侧滑对垂直尾翼的侧向力,这最小化了 V M C ′ V_{MC^{\prime }} VMC′,有效减少了偏航力矩,并给予方向舵更多权限来阻止偏航。
驾驶舱指示将是转弯指针居中,侧滑指示器(小球)向工作发动机方向偏移半个直径。"小球"不居中,但飞机不侧滑。这种方法产生最小阻力,提供最佳爬升能力,因此是发动机失效后使飞机达到平衡的首选方法。
不对称推力下的滚转和偏航力矩
滚转和偏航力矩以及飞行控制平衡它们的能力将决定不对称推力下飞机的可控性。不对称推力下的滚转和偏航力矩受以下因素影响:
-
工作发动机上的推力
推力越大,工作发动机产生的偏航力矩越大。发动机安装在机翼上越远(增加推力臂),偏航力矩越大。在低速和全油门时推力最大。
-
高度
推力随高度增加和/或温度升高(高密度高度)而减小。发动机失效的最坏情况是低密度高度,例如在寒冷天气在海平面机场起飞后立即失效。
-
停转发动机和螺旋桨的阻力
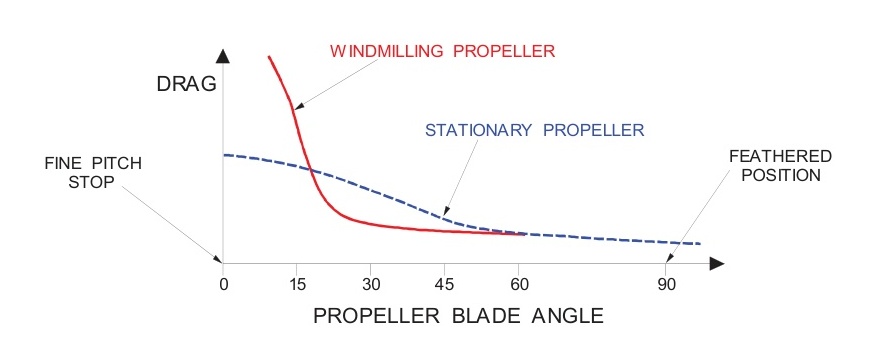
停转发动机的阻力总是增加偏航力矩。贡献大小取决于螺旋桨是风车转动、停止还是顺桨,图12.26。喷气式发动机飞机不存在这种效应。
-
风车转动的螺旋桨阻力很高。它被相对气流驱动,产生阻力和扭矩。
-
如果螺旋桨静止,它产生阻力但没有扭矩。静止螺旋桨的阻力小于风车转动的螺旋桨。
-
顺桨的螺旋桨产生最小阻力。因为它不旋转,所以没有扭矩,而且由于叶片与相对气流成边缘状态,有害阻力最小。
-
通过关闭发动机整流罩襟翼也可以减少停转发动机的阻力。
-
不对称叶片效应(也称为’P’因素)
如果两个发动机都顺时针旋转,右发动机有更长的推力臂。左发动机失效将产生更大的偏航力矩。反向旋转螺旋桨、反转螺旋桨或喷气式发动机的飞机不存在这种效应。
-
重心位置
飞机绕重心旋转。重心的前后位置对失效发动机产生的偏航力矩没有影响,但会影响方向舵臂,从而影响方向舵力矩。重心在后限位置将给出最小的方向舵臂,对抗失效发动机偏航力矩的能力最弱。
注意:反转螺旋桨安装在同一轴上,通常由同一发动机驱动,朝相反方向旋转
- 扭矩反作用
当发动机转动螺旋桨时,等大反向的反作用力试图使发动机向另一方向转动。在螺旋桨以相同方向旋转(从后方看通常为顺时针方向)的飞机上,一个发动机失效后,扭矩试图使飞机向左滚转。因此,左发动机失效会产生最大的向左滚转力矩。使用反向旋转发动机时,不对称叶片效应(P因素)和扭矩反作用都被最小化,不再有临界发动机。喷气式发动机飞机不存在这种效应。
- 由于螺旋流引起的升力差异
一侧发动机失效将导致该侧螺旋桨螺旋流引起的诱导升力损失。总升力将减少,导致下降趋势,但更重要的是,将产生向停转发动机方向的滚转力矩;如果展开后缘襟翼,由于初始 C L C_{L} CL更高,向停转发动机的滚转力矩将更大。喷气式发动机飞机不存在这种效应。
-
由于侧滑引起的滚转力矩
如果飞机以偏航飞行以平衡方向舵力,将产生侧滑。在图12.24中,飞机向左侧滑。左翼(停转发动机侧)的上反角将导致左翼升力增加,这将补偿一些由于螺旋桨螺旋流损失而导致的升力损失。
-
重量
任何重量增加都将要求在给定速度下增加攻角。
-
这将增加不对称叶片效应(P因素)并产生更大的偏航力矩。
-
垂直尾翼和方向舵将更多地被机翼和机身的扰流所掩盖,使方向舵和垂直尾翼效率降低;因此,可用的方向舵力矩将减小。
-
-
空速
假设控制面全偏转,飞行控制的有效性取决于动压。在低空速下动压的准确测量由校准空速(CAS)给出。CAS是经位置误差校正的指示空速。在低空速/高 C L C_{L} CL下,皮托管/静压系统感知的压力受高攻角影响,因此必须进行补偿,使指示空速反映更准确的动压测量值。更高的指示空速意味着更有效的控制,因此有更大的可用方向舵力矩来平衡失效发动机的偏航力矩。如果其他参数保持不变,较低的指示空速将减少可用的方向舵力矩。指示空速是不对称推力下控制飞机的关键要素。
最小控制空速
已经表明,当多发飞机发动机失效时,几个变量会影响偏航力矩和用于对抗它的方向舵力矩。还表明,存在一个最小指示空速( V M C V_{\mathrm {MC}} VMC),低于该速度飞行员不可能在不对称推力下保持方向控制。
适航当局,在这种情况下是EASA,规定了在确定新型飞机飞行手册中包含的最小空速时必须满足的条件。与大多数其他情况一样,确定最小控制空速的条件是"最坏情况"。这些速度内置了安全系数,以考虑飞机老化和平均飞行员反应时间。
由于飞机在某些构型下的操纵品质有明显差异,最小控制空速( V M C V_{MC} VMC)有三种不同的规格:
-
V M C A V_{MCA} VMCA 最小控制速度 - 空中。
-
V M C G V_{MCG} VMCG 最小控制速度 - 地面上。
-
V M C l V_{MCl} VMCl 最小控制速度 - 着陆构型。
V M C A V_{MCA} VMCA(CS 25.149 释义)
V M C A V_{\mathrm {MCA}} VMCA是校准空速,当临界发动机突然失效时,可以在该发动机仍然失效的情况下保持对飞机的控制,并保持直线飞行,倾斜角不超过 5 ∘ 5^{\circ } 5∘。
V M C A V_{MCA} VMCA不得超过1.13 V S R V_{SR} VSR,条件是:
-
发动机最大可用起飞功率或推力。
-
飞机调整为起飞状态。
-
最不利的重心位置。
-
最大海平面起飞重量。
-
飞机处于最临界起飞构型(但起落架收起);以及
-
飞机在空中,地面效应可忽略;以及
-
如适用,失效发动机的螺旋桨:
-
风车转动
-
顺桨,如果飞机有自动顺桨装置。
-
在 V M C A V_{MCA} VMCA下保持控制所需的方向舵力不得超过150磅,也不需要减小工作发动机的功率或推力。
注意:没有性能要求,只有方向控制。
影响 V MCA V_\text{MCA} VMCA的因素
倾斜角
向工作发动机倾斜可减少所需的方向舵偏转,从而允许更低的 V M C A V_{MCA} VMCA。规定最大 5 ∘ 5^{\circ } 5∘是因为更大的倾斜角会显著减少升力的垂直分量;攻角必须增加,带来更高诱导阻力的额外惩罚。
重心位置
由于飞机绕重心旋转,重心位置直接影响方向舵臂的长度,从而影响方向舵和垂直尾翼保持方向稳定性和控制的能力。"最坏情况"是重心在后限位置。如果在这种构型下能满足要求,在任何其他重心位置保持方向控制的能力都会增强。
副翼有效性
在低空速下,动压低,这减少了所有飞行控制在给定偏转角度下的有效性。这种对方向舵的影响已经讨论过,但副翼也会受到类似影响。在图12.24和图12.25(右滚输入)中,机翼通过副翼保持水平或所需的倾斜角。在减小的空速下,必须使用更大的右滚副翼偏转来保持机翼在所需位置。左侧的"下"副翼会因其增加的诱导阻力而增加偏航力矩。在低指示空速(增加的 C L ) \left.C_{L}\right) CL)下,大角度的下副翼可能导致该翼失速,并导致向停转发动机方向不可控的滚转。 V M C A V_{\mathrm {MCA}} VMCA必须足够高以防止这种不受欢迎的可能性。
襟翼位置
襟翼位置影响升力/阻力比、机头下俯力矩和失速速度。在不对称推力下,襟翼降低爬升性能,增加失速裕度,但不直接影响 V M C A V_{\mathrm {MCA}} VMCA。然而,如果使用起飞襟翼,由于螺旋桨螺旋流,两翼之间的升力差异进一步增加。这增加了滚转力矩,需要增加副翼偏转,间接增加 V M C A V_{MCA} VMCA。
起落架
起落架增加阻力并降低性能。重心前方增加的龙骨表面略微降低方向稳定性,因此在侧滑条件下,垂直尾翼和方向舵受到阻碍,这将略微增加 V M C A V_{MCA} VMCA。
高度和温度
V M C A V_{\mathrm {MCA}} VMCA受工作发动机产生的推力量影响。随着高度和/或温度增加,非增压发动机的推力将减小。因此, V M C A V_{MCA} VMCA随高度和/或温度增加而减小。
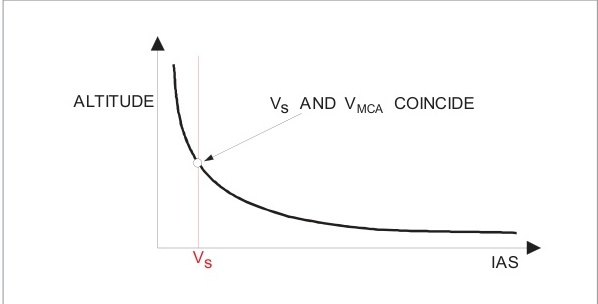
V s V_{s} Vs和 V M C A V_{MCA} VMCA之间的关系
V s V_{s} Vs随高度增加保持恒定,因此可以在图12.27中用直线表示。(第7章显示失速速度确实在更高高度增加,但本研究仅涉及较低高度)。图12.27显示,在约3000英尺高度, V a ∼ V M C A \mathrm {V}_{\mathrm {}}\text{a}\mathrm {\sim V}_{\mathrm {MCA}} Va∼VMCA通常对应。因此在这个高度以上,失速速度高于 V M C A V_{MCA} VMCA。如果在发动机失效后减速,工作发动机全功率运行,飞机可能在达到 V M C A V_{MCA} VMCA之前失速。控制损失的裕度减小;在这种情况下是由于失速。
V M C G V_{MCG} VMCG(CS 25.149 释义)
V M C G V_{MCG} VMCG,地面最小控制速度,是起飞滑跑过程中的校准空速,当临界发动机突然失效时,仅使用方向舵控制(不使用前轮转向)就能保持对飞机的控制,使用正常驾驶技能安全继续起飞。方向舵控制力不得超过150磅(68.1千克),在飞机离地前,横向控制仅可用于保持机翼水平。在确定 V M C G V_{MCG} VMCG时,假设所有发动机工作时飞机沿跑道中心加速,从临界发动机失效点到恢复平行于中心线方向的点,其路径在任何点不得横向偏离中心线超过30英尺(9.144米)。与 V M C A V_{MCA} VMCA一样,这必须在以下条件下确定:
-
发动机最大可用起飞功率或推力。
-
飞机调整为起飞状态。
-
最不利的重心位置。
-
最大海平面起飞重量。
影响 V MCG V_\text{MCG} VMCG的因素
高度和温度
V M C G V_{MCG} VMCG受工作发动机产生的推力量影响。随着高度和/或温度增加,非增压发动机的推力将减小。因此, V M C G V_{MCG} VMCG随高度和/或温度增加而减小。
前轮转向
前轮转向设计用于滑行——在低速下进行大幅度和急转弯,离开跑道和停车。在湿滑、结冰或光滑跑道上起飞时,前轮在70至90节之间开始滑行(取决于轮胎压力和水或雪泥深度),转向效果很小。一旦飞机开始移动,前轮除了横向转动和滑行外几乎没有其他作用。
V M C G V_{MCG} VMCG在飞行测试中确定,通常在干燥跑道上进行。如果测试飞行员使用前轮转向,会给出一个错误的、较低的速度,在该速度下可以在临界发动机突然失效后保持地面方向控制。在这个速度下的光滑跑道上,即使航线飞行员使用前轮转向,也无法提供发动机失效后保持方向控制所需的帮助,飞机会偏离跑道侧面。法规确保在"最坏情况"下建立限制,以便在正常运行期间提供最大安全系数。
方向舵臂
当飞机在地面上时,它绕主起落架旋转,而主起落架位于重心后方。因此,飞机在地面上时方向舵臂较短。在大多数飞机上, V M C G V_{MCG} VMCG高于 V M C A V_{MCA} VMCA。
V M C L V_{MCL} VMCL(CS 25.149 释义)
V M C L V_{MCL} VMCL,所有发动机工作时进近和着陆的最小控制速度,是校准空速,当临界发动机突然失效时,可以保持对飞机的控制,并保持直线飞行,倾斜角不超过 5 ∘ 5^{\circ} 5∘。
V M C L V_{MCL} VMCL必须在以下条件下确定:
-
飞机处于所有发动机工作时进近和着陆的最临界构型,
-
最不利的重心位置,
-
飞机调整为所有发动机工作时的进近状态,
-
最不利的重量,
-
对于螺旋桨飞机,失效发动机的螺旋桨处于无需飞行员操作即可达到的位置,以及
-
工作发动机设置为复飞功率或推力。
在演示 V M C L V_{MCL} VMCL时:
-
方向舵力不得超过150磅。
-
飞机不得表现出危险的飞行特性或需要特殊的驾驶技能、警觉性或力量。
-
横向控制必须足以使飞机从稳定飞行的初始状态,在不超过5秒内通过 2 0 ∘ 20^{\circ} 20∘角度滚转,以便开始远离失效发动机的转弯。
影响 V M C L V_{MCL} VMCL的因素
副翼有效性
在低空速下,动压低,这减少了所有飞行控制在给定偏转角度下的有效性。这种对方向舵的影响已经讨论过,但副翼也会受到类似影响。在减小的空速下,必须使用更大的副翼偏转来获得所需的滚转响应。左侧的"下"副翼也会因其增加的诱导阻力而增加偏航力矩,并可能在低指示空速(高 C L C_L CL)下使机翼失速。副翼有效性在考虑 V M C L V_{MCL} VMCL时显然非常重要,因为这个最小控制速度包含滚转要求,而不仅仅是方向控制。
最小控制速度总结
CS 25.149规定了在认证新飞机时确定最小控制速度的标准。这些确定的速度将包含在飞机的飞行手册中。
通过仔细研究上述摘录,可以注意到几点:
-
在确定 V M C V_{MC} VMC时不得使用前轮转向。使用它会人为降低 V M C G V_{MCG} VMCG。在服务中,当在光滑跑道上操作时,前轮转向将无效,因此在规定的 V M C G V_{MCG} VMCG或以上可能无法方向控制飞机。
-
V M C L V_{MCL} VMCL包括滚转要求,而不仅仅是方向控制,与其他速度不同。
-
发动机产生的推力取决于空气密度,因此推力会随高度和温度增加而减小。由于不对称推力引起的偏航力矩因此会随高度和温度减小,所以可以在较低的指示空速下保持控制。 V M C V_{MC} VMC因此随高度和温度增加(更高的密度高度)而减小。
单发动机失效时的性能
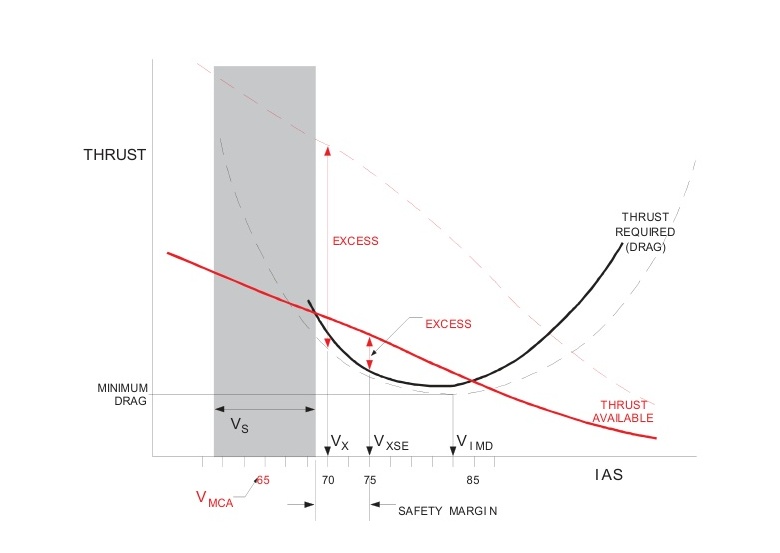
在第369页中显示,飞机的爬升能力取决于可用的剩余推力,即在平衡空气动力阻力后的剩余推力。如果双发飞机失去一个发动机,总推力减少50%,但剩余推力(推力减去空气动力阻力)减少超过50%,如图12.28所示。爬升能力可能减少多达80%。
单发爬升角
爬升角由可用的剩余推力决定。当飞机以剩余推力最大(最大推力与阻力比)的指示空速飞行时,爬升角将达到最大。由于推力随前进速度减小,总阻力在最小阻力速度( V I M D V_{IMD} VIMD)以下和以上增加,最佳爬升角在低于 V I M D V_{IMD} VIMD但安全高于失速速度的速度下实现。最大爬升角的空速是所有发动机工作时的 V X V_X VX和最佳单发爬升角的 V X S E V_{XSE} VXSE。
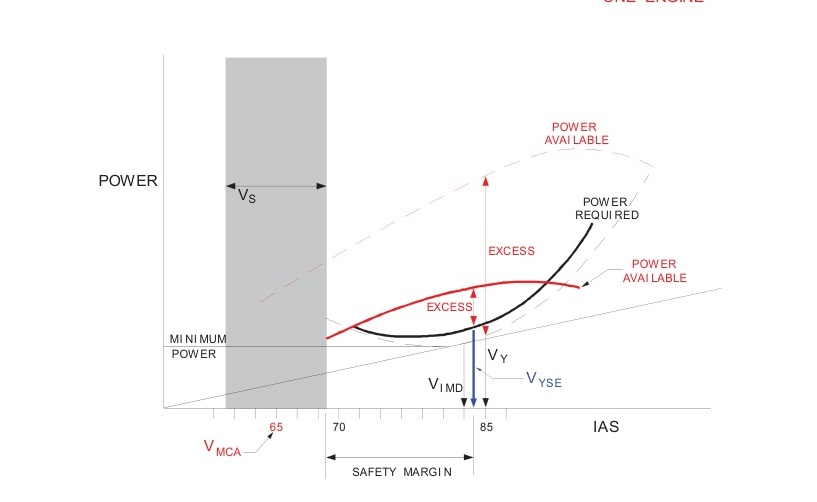
单发爬升率
爬升率由可用的剩余功率决定。功率是做功的速率,功是力乘以移动距离,所以功率是力乘以单位时间内移动的距离,即推力或阻力乘以真空速(推力或阻力因为它们都是力,真空速因为它是唯一的速度!)。虽然推力随前进速度减小,但由于速度因素,总可用功率增加。同样,所需功率是阻力乘以真空速的度量,因此可用的剩余功率决定了可用的爬升率。最佳爬升率的空速是所有发动机工作时的 V Y V_Y VY和最佳单发爬升率的 V Y S E V_{YSE} VYSE。
V Y V_Y VY和 V Y S E V_{YSE} VYSE高于 V X V_X VX和 V X S E V_{XSE} VXSE,提供了高于失速和 V M C A V_{MCA} VMCA的更安全裕度。在大多数情况下, V Y V_Y VY和 V Y S E V_{YSE} VYSE是最佳使用速度。在小型双发飞机上, V Y S E V_{YSE} VYSE在空速指示器上用蓝色径向线标记,称为"蓝线速度"。
结论
在给定的高度、空速和油门位置下,剩余推力取决于产生的阻力量,这将取决于构型、重量以及是否需要转弯。平衡不对称推力所需的控制面偏转也会导致阻力增加。因此,在失去发动机后,特别是在起飞或复飞期间,必须减少阻力,在远离地面前不要转弯。
可以通过顺桨失效发动机的螺旋桨、收起起落架、小心收起襟翼、关闭失效发动机的整流罩襟翼,以及向工作发动机方向倾斜不超过 5 ∘ 5^{\circ} 5∘来减少阻力。以 V Y S E V_{YSE} VYSE(蓝线速度)飞行,工作发动机使用最大连续推力,将提供最大爬升性能和对飞机的最佳控制。
问题
-
在直线平飞的动力飞行中,作用于飞机的主要力有:
a. 推力、升力、重量。
b. 推力、升力、阻力、重量。
c. 推力、升力、阻力。
d. 升力、阻力、重量。
-
对于水平飞行的飞机,如果机翼压力中心在重心后方且没有推力/阻力耦合,尾翼负载必须是:
a. 向上的。
b. 向下的。
c. 零。
d. 向前的。
-
考虑恒定空速的直线平飞中作用于飞机的力时,哪种说法是正确的?
a. 重量垂直向地球中心作用。
b. 升力垂直于弦线作用,必须大于重量。
c. 推力向前平行于相对风作用,大于阻力。
d. 升力与飞机重量方向相同。
-
水平安定面在水平飞行中通常提供向下的负载,因为:
a. 主翼升力始终为正。
b. 升力/重量和推力/阻力耦合共同产生机头下俯力矩。
c. 产生的升力在高速时大于所需。
d. 这种构型产生较少干扰。
-
轻型通用航空飞机在减小功率时倾向于机头下俯的原因是:
a. 推力线水平作用且位于阻力力之上。
b. 重心位于压力中心前方。
c. 压力中心位于重心前方。
d. 阻力力水平作用且位于推力线之上。
-
为了在起飞时获得最佳障碍物越过能力,起飞应该:
a. 襟翼部分放下,以最佳爬升率速度( V Y V_Y VY)进行。
b. 襟翼部分放下,以最佳爬升角速度( V X V_X VX)进行。
c. 襟翼收起,以最佳爬升率速度( V Y V_Y VY)进行。
d. 襟翼收起,以最佳爬升角速度( V X V_X VX)进行。
-
爬升角与以下因素成正比:
a. 升力超过重量的量。
b. 推力超过阻力的量。
c. 推力超过重量的量。
d. 机翼的攻角。
-
在稳定速度的爬升中,推力是:
a. 等于空气动力阻力。
b. 大于空气动力阻力。
c. 小于空气动力阻力。
d. 等于沿飞行路径的重量分量。
-
飞机的恒定爬升率由以下因素决定:
a. 风速。
b. 飞机重量。
c. 剩余发动机功率。
d. 剩余空速。
-
假设起飞后转向顺风航向。相对于地面,飞机将:
a. 逆风时比顺风时有更大的爬升率。
b. 顺风时比逆风时有更陡的爬升角。
c. 逆风或顺风时有相同的爬升角。
d. 逆风时比顺风时有更陡的爬升角。
-
高密度高度对飞机性能有什么影响?
a. 它增加起飞性能。
b. 它增加发动机性能。
c. 它降低爬升性能。
-
在稳定爬升中,升力是:
a. 小于重量。
b. 恰好等于重量。
c. 等于重量加阻力。
d. 大于重量。
-
在稳定爬升中,机翼升力是:
a. 等于重量。
b. 大于重量。
c. 等于垂直于飞行路径的重量分量。
d. 等于重量的垂直分量。
-
在滑翔中,以下力作用于飞机:
a. 升力、重量、推力。
b. 升力、阻力、重量。
c. 阻力、推力、重量。
d. 仅升力和重量。
-
对于最大升阻比为20:1的滑翔机,在静止空气中能达到的最平缓滑翔角是:
a. 10英尺中1英尺。
b. 20英尺中1英尺。
c. 40英尺中1英尺。
d. 200英尺中1英尺。
-
要在滑翔时覆盖最大距离,滑翔速度必须是:
a. 接近失速速度。
b. 在VNE限制内尽可能高。
c. 比 V M D V_{MD} VMD快约30%。
d. 提供最高升阻比的速度。
-
如果飞机重量增加,最大滑翔距离:
a. 减小。
b. 增加。
c. 保持不变,下降率不变。
d. 保持不变,但下降率增加。
-
逆风滑翔时,地面覆盖距离将:
a. 小于静止空气中。
b. 与静止空气中相同,但滑翔角更陡。
c. 与静止空气中相同,但滑翔角更平缓。
d. 大于静止空气中。
-
在"带动力"下降中,作用于飞机的力是:
a. 升力、阻力和重量。
b. 升力、推力和重量。
c. 升力、阻力、推力和重量。
d. 仅升力和重量。
-
如果在滑翔中展开空气制动器,并保持速度,下降率将:
a. 增加,滑翔角将更陡。
b. 增加,但滑翔角保持不变。
c. 减小。
d. 保持不变。
-
一架飞机在静止空气中50节时的升阻比为16:1。在25节直接逆风中的大致滑翔比是多少?
a. 32:1
b. 16:1
c. 8:1
d. 4:1
-
在转弯中,升力可分解为两个力;这些是:
a. 与推力相反的力和与重量相等且相反的力。
b. 向心力和与阻力相等且相反的力。
c. 向心力和与重量相等且相反的力。
d. 离心力和与推力相等且相反的力。
-
在恒定指示空速的转弯中,与相同指示空速的直线平飞相比:
a. 需要相同的功率,因为指示空速相同。
b. 需要更多功率,因为阻力更大。
c. 需要更多功率,因为需要一些推力来提供向心力。
d. 需要更少功率,因为所需升力更少。
-
在给定真空速和倾斜角的转弯中:
a. 只有一个可能的转弯半径。
b. 可以通过改变俯仰来改变半径。
c. 可以通过改变偏航来改变半径。
d. 有两个不同的半径可能,一个向右,一个向左。
-
在恒定指示空速的转弯中,随着倾斜角增加,载荷系数将:
a. 与倾斜角成正比增加。
b. 以递增的速率增加。
c. 减小。
d. 保持不变。
-
在转弯中向外侧滑是由以下原因造成的:
a. 偏航率不足。
b. 倾斜过大。
c. 机头上仰过多。
d. 倾斜不足。
-
对于恒定指示空速的转弯,如果转弯半径减小,载荷系数将:
a. 增加。
b. 减小,但倾斜角增加。
c. 减小,但倾斜角减小。
d. 保持不变。
-
一架飞机在水平飞行中的失速速度为70节指示空速。在60°平衡转弯中,失速速度将是:
a. 76节。
b. 84节。
c. 99节。
d. 140节。
-
在水平协调转弯中保持恒定载荷系数的同时增加空速将导致:
a. 离心力增加。
b. 相同的转弯半径。
c. 转弯半径减小。
d. 转弯半径增加。
-
飞行员如何同时增加转弯率并减小半径?
a. 减小倾斜角并增加空速。
b. 增加倾斜角并增加空速。
c. 增加倾斜角并减小空速。
-
如果总重2000千克的飞机在飞行中承受6000千克的总负载,载荷系数将是:
a. 9g
b. 2g
c. 6g
d. 3g
-
为什么在转弯中必须增加攻角以保持高度?
a. 补偿诱导阻力增加。
b. 增加升力的水平分量等于垂直分量。
c. 补偿升力垂直分量的损失。
d. 防止机头下降到地平线以下和空速增加。
-
两架不同重量的飞机以相同倾斜角进行稳定转弯:
a. 较重的飞机将有更高的"g"负载。
b. 较轻的飞机将有更高的"g"负载。
c. 它们都将有相同的"g"负载。
-
对于多发飞机, V M C G V_{MCG} VMCG被定义为一个发动机失效时的地面最小控制速度。飞机必须能够:
a. 放弃起飞。
b. 继续起飞或放弃。
c. 仅使用主要控制继续起飞。
d. 使用主要控制和前轮转向继续起飞。
-
什么标准决定双发飞机的哪个发动机是"临界"发动机?
a. 推力中心距机身中心线最远的那个。
b. 推力中心最接近机身中心线的那个。
c. 制造商指定的、产生最大可用推力的那个。
d. 失效时造成最小偏航力矩的那个。
-
临界发动机失效后,轻型双发飞机的飞行员在 V M C A V_{MCA} VMCA时应能保持什么性能?
a. 航向、高度和每分钟爬升50英尺的能力。
b. 仅航向。
c. 航向和高度。
答案
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| b | b | a | b | b | d | b | b | c | d | c | a |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| c | b | b | d | d | a | c | a | b | c | b | a |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| b | d | a | c | d | c | d | c | c | c | b | b |


















 692
692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











