







提示:本文用于学习记录
文章目录
前言
Anti-UAV 代码部署在 Jetson TX2
一、Anti-UAV Dataset
该数据集为视频数据集与对应标签
二、使用步骤
1. 创建虚拟环境并安装所需包
代码如下(示例):
conda create -n anti_uav python=3.7
conda activate anti_uav
pip install opencv-python torch
2. 导入数据
代码如下(示例):
git clone https://github.com/ZhaoJ9014/Anti-UAV.git
3. 运行
代码如下(示例):
pwd
# 运行之前可在终端输入 pwd 获取当前路径,再进入 .py 文件修改为当前正确路径,即可运行成功!
python check.py
效果如下:
录制_2022_10_25_16_44_13_105
三、无人机数据集的训练
3.1 数据集介绍
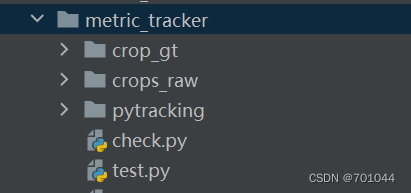
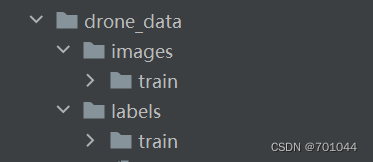
3.1.1 文件结构
3.1.2 数据集类别
该数据集共有1个类别:drone
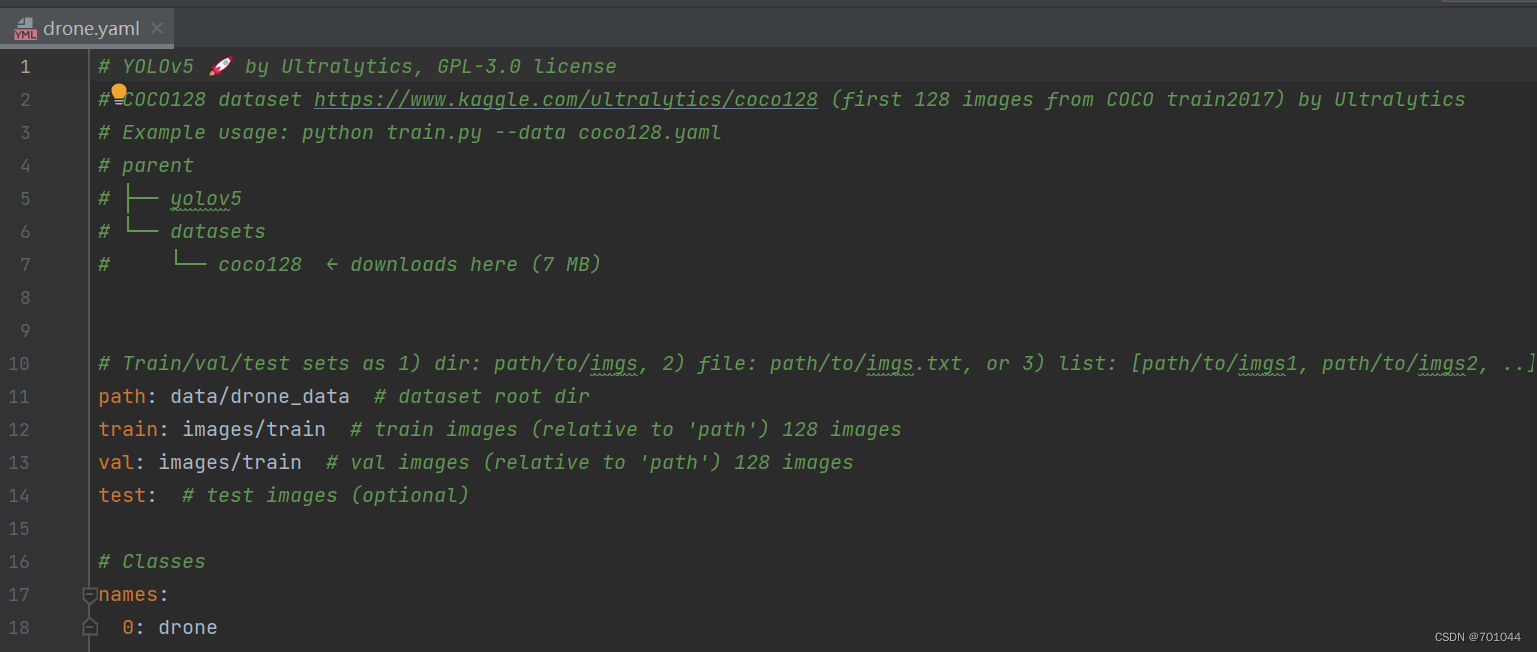
3.2 修改 yaml 文件
注意路径与上文一致;
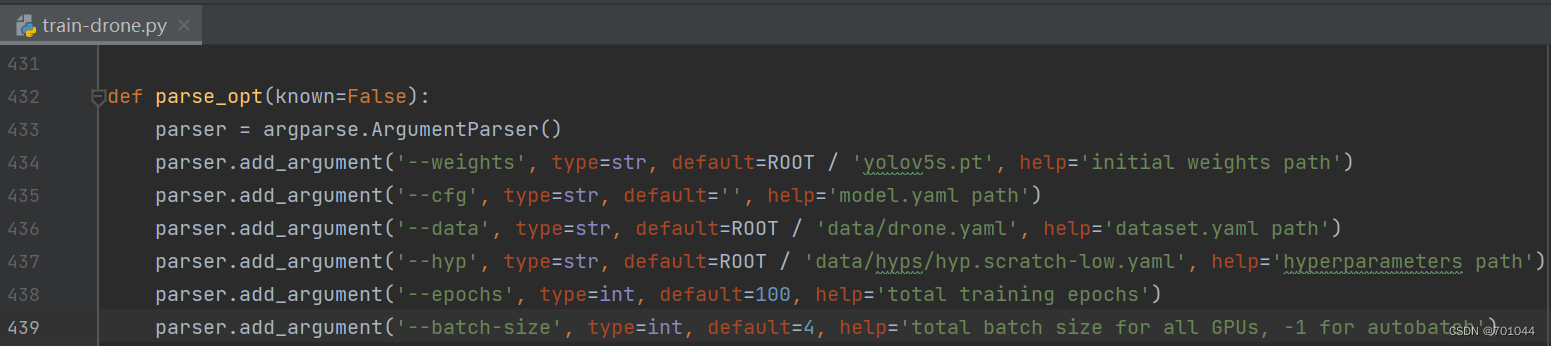
3.3 修改 train.py
修改 drone.yaml 的路径,这里的 epochs 设置的是100,batch-size 设置的是 4。
所有步骤完成之后即可开始训练
3.4 运行 detect.py
复制训练结束后的 weights 文件夹中的 best.pt 权重路径,检测训练好的权重
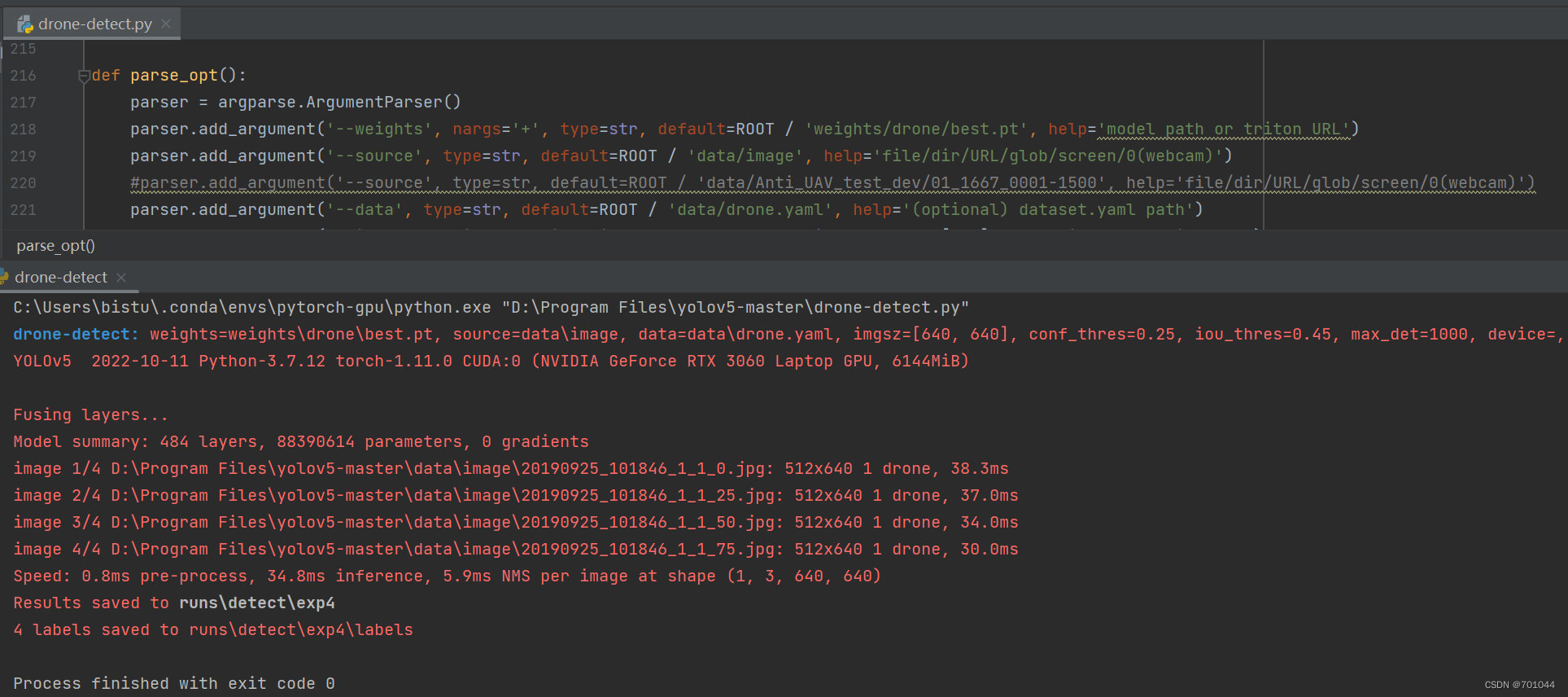
效果如下:

四、总结
以上就是 Anti-UAV 代码在 Jetson TX2 上的部署与无人机数据集的训练与检测过程。
















 1362
1362











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











