







SOEM主站开发笔记-- 点亮第一个LED----SOEM 的simpletest.c代码的解析以及改动
本周实现了SOEM 点亮第一个LED的操作,记录一下实现的过程。
开发平台使用的是野火的imx6ull。
1. 下载代码
SOEM的代码在github上就可以找到,它的官网下载链接是:
https://github.com/OpenEtherCATsociety/SOEM
主站代码如果懒得下载可以直接下载我提供的工程。我的项目资料托管在gitee,里面有zip 形式的代码压缩包。
https://gitee.com/jeasonb/soem_-imx6ull
2.编译代码
SOEM的代码支持很多的平台,我的实验是基于linux 平台进行的。另外一方面就是 SOEM 是使用cmake 生成和管理Makefile 文件的,如果读者的开发环境没有cmake的话是需要去安装一个的。
先分享一个错误的编译过程:
root@jeason:~/work/ethercat/SOEM-master# ls
appveyor.yml bin ChangeLog cmake CMakeLists.txt doc Doxyfile drvcomment.txt LICENSE osal oshw README.md soem test
root@jeason:~/work/ethercat/SOEM-master# mkdir build
root@jeason:~/work/ethercat/SOEM-master# cd build/
root@jeason:~/work/ethercat/SOEM-master/build# cmake ..
-- The C compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
OS is linux
LIB_DIR: lib
-- Configuring done
-- Generating done
-- Build files have been written to: /root/work/ethercat/SOEM-master/build
root@jeason:~/work/ethercat/SOEM-master/build# make
Scanning dependencies of target soem
[ 4%] Building C object CMakeFiles/soem.dir/soem/ethercatbase.c.o
[ 9%] Building C object CMakeFiles/soem.dir/soem/ethercatcoe.c.o
[ 14%] Building C object CMakeFiles/soem.dir/soem/ethercatconfig.c.o
[ 19%] Building C object CMakeFiles/soem.dir/soem/ethercatdc.c.o
[ 23%] Building C object CMakeFiles/soem.dir/soem/ethercateoe.c.o
[ 28%] Building C object CMakeFiles/soem.dir/soem/ethercatfoe.c.o
[ 33%] Building C object CMakeFiles/soem.dir/soem/ethercatmain.c.o
[ 38%] Building C object CMakeFiles/soem.dir/soem/ethercatprint.c.o
[ 42%] Building C object CMakeFiles/soem.dir/soem/ethercatsoe.c.o
[ 47%] Building C object CMakeFiles/soem.dir/osal/linux/osal.c.o
[ 52%] Building C object CMakeFiles/soem.dir/oshw/linux/nicdrv.c.o
[ 57%] Building C object CMakeFiles/soem.dir/oshw/linux/oshw.c.o
[ 61%] Linking C static library libsoem.a
[ 61%] Built target soem
Scanning dependencies of target slaveinfo
[ 66%] Building C object test/linux/slaveinfo/CMakeFiles/slaveinfo.dir/slaveinfo.c.o
[ 71%] Linking C executable ../../../../bin/slaveinfo
[ 71%] Built target slaveinfo
Scanning dependencies of target eepromtool
[ 76%] Building C object test/linux/eepromtool/CMakeFiles/eepromtool.dir/eepromtool.c.o
[ 80%] Linking C executable ../../../../bin/eepromtool
[ 80%] Built target eepromtool
Scanning dependencies of target simple_test
[ 85%] Building C object test/linux/simple_test/CMakeFiles/simple_test.dir/simple_test.c.o
[ 90%] Linking C executable ../../../../bin/simple_test
[ 90%] Built target simple_test
Scanning dependencies of target my_test
[ 95%] Building C object test/linux/my_test/CMakeFiles/my_test.dir/my_test.c.o
[100%] Linking C executable ../../../../bin/my_test
[100%] Built target my_test
root@jeason:~/work/ethercat/SOEM-master/build#
上面的虽然最后都成功的编译出了可执行的文件,但是 并没有使用交叉编译工具链,编译出来的版本是基于当前的开发服务器版本的。所以就是说如果是需要在树莓派或者ubuntu 上直接搭建SOEM的主站的小伙伴可以使用这种编译方法,但是为了在imx6ull 上跑主站,我们显然是不能这么编译。
我们需要设置工具链!!!
在进行开发之前我已经将交叉编译工具链安装到我的系统路径下,所以我不需要export PATH
root@jeason:~/work/ethercat/SOEM-master/build# which arm-linux-gnueabihf-gcc
/usr/bin/arm-linux-gnueabihf-gcc
如果没有将工具链的路径加入到系统路径 请执行
export PATH=$PATH:/your/tool/path # /your/tool/path 是你的工具链的位置
接下来修改系统内的默认编译工具 执行
export CC=arm-linux-gnueabihf-gcc
经过上述的操作之后现在我们的编译工具链就已经设置好了
此时就可以开始新的编译了
root@jeason:~/work/ethercat/SOEM-master_2/SOEM-master# mkdir build
root@jeason:~/work/ethercat/SOEM-master_2/SOEM-master# cd build/
root@jeason:~/work/ethercat/SOEM-master_2/SOEM-master/build# cmake ..
-- The C compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/arm-linux-gnueabihf-gcc
-- Check for working C compiler: /usr/bin/arm-linux-gnueabihf-gcc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
OS is linux
LIB_DIR: lib
-- Configuring done
-- Generating done
-- Build files have been written to: /root/work/ethercat/SOEM-master_2/SOEM-master/build
root@jeason:~/work/ethercat/SOEM-master_2/SOEM-master/build# make
Scanning dependencies of target soem
[ 5%] Building C object CMakeFiles/soem.dir/soem/ethercatbase.c.o
[ 10%] Building C object CMakeFiles/soem.dir/soem/ethercatcoe.c.o
[ 15%] Building C object CMakeFiles/soem.dir/soem/ethercatconfig.c.o
[ 21%] Building C object CMakeFiles/soem.dir/soem/ethercatdc.c.o
[ 26%] Building C object CMakeFiles/soem.dir/soem/ethercateoe.c.o
[ 31%] Building C object CMakeFiles/soem.dir/soem/ethercatfoe.c.o
[ 36%] Building C object CMakeFiles/soem.dir/soem/ethercatmain.c.o
[ 42%] Building C object CMakeFiles/soem.dir/soem/ethercatprint.c.o
[ 47%] Building C object CMakeFiles/soem.dir/soem/ethercatsoe.c.o
[ 52%] Building C object CMakeFiles/soem.dir/osal/linux/osal.c.o
[ 57%] Building C object CMakeFiles/soem.dir/oshw/linux/nicdrv.c.o
[ 63%] Building C object CMakeFiles/soem.dir/oshw/linux/oshw.c.o
[ 68%] Linking C static library libsoem.a
[ 68%] Built target soem
Scanning dependencies of target slaveinfo
[ 73%] Building C object test/linux/slaveinfo/CMakeFiles/slaveinfo.dir/slaveinfo.c.o
[ 78%] Linking C executable slaveinfo
[ 78%] Built target slaveinfo
Scanning dependencies of target eepromtool
[ 84%] Building C object test/linux/eepromtool/CMakeFiles/eepromtool.dir/eepromtool.c.o
[ 89%] Linking C executable eepromtool
[ 89%] Built target eepromtool
Scanning dependencies of target simple_test
[ 94%] Building C object test/linux/simple_test/CMakeFiles/simple_test.dir/simple_test.c.o
[100%] Linking C executable simple_test
[100%] Built target simple_test
root@jeason:~/work/ethercat/SOEM-master_2/SOEM-master/build#
可以很明显看到现在工具链已经切换过去了,并且已经编译出来了我们想要的可执行文件。 这一阶段的开发环境搭建就完成了,接下来就是撸代码了。
3.运行demo查看效果
在正式的撸代码之前,我们需要对官方提供的CMakeLists.txt 进行一定程序的修改。
1.设置输出bin 的路径,因为我不希望去SOEM/test/linux/xxx/xx下面去找我的可执行文件,所以要限定可执行文件的生成路径。
在cmake 中添加这条语句:
SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
这句话的意思就是让输出的文件 到你工程路径下的bin 文件夹
SOEM 为我们提供了三个 DEMO ,分别是①读取从站的信息②从站的 eeprom 操作(读取,写入,这个功能可以实现烧录XML文件)③简单的测试demo
程序编译完成之后我们可以先运行一下测试程序(slaveinfo),检查一下当前环境的硬件信息。程序的运行效果如下:
root@imx6ull14x14evk:/mnt/ethercat/SOEM-master/bin# ls
1.bin 111.bin eepromtool my_test no_cpu.bin simple_test slaveinfo spi.bin
root@imx6ull14x14evk:/mnt/ethercat/SOEM-master/bin# ./slaveinfo eth1
SOEM (Simple Open EtherCAT Master)
Slaveinfo
Starting slaveinfo
ec_init on eth1 succeeded.
1 slaves found and configured.
Calculated workcounter 3
Not all slaves reached safe operational state.
Slave 1 State= 8 StatusCode= 0 : No error
Slave:1
Name:ECAT-EVB
Output size: 48bits
Input size: 48bits
State: 8
Delay: 0[ns]
Has DC: 1
DCParentport:0
Activeports:1.0.0.0
Configured address: 1001
Man: 00000009 ID: 00009252 Rev: 00000001
SM0 A:1000 L: 128 F:00010026 Type:1
SM1 A:1080 L: 128 F:00010022 Type:2
SM2 A:1100 L: 6 F:00010064 Type:3
SM3 A:1400 L: 6 F:00010020 Type:4
FMMU0 Ls:00000000 Ll: 6 Lsb:0 Leb:7 Ps:1100 Psb:0 Ty:02 Act:01
FMMU1 Ls:00000006 Ll: 6 Lsb:0 Leb:7 Ps:1400 Psb:0 Ty:01 Act:01
FMMUfunc 0:1 1:2 2:3 3:0
MBX length wr: 128 rd: 128 MBX protocols : 04
CoE details: 23 FoE details: 00 EoE details: 00 SoE details: 00
Ebus current: 0[mA]
only LRD/LWR:0
End slaveinfo, close socket
End program
root@imx6ull14x14evk:/mnt/ethercat/SOEM-master/bin#
通过上述的片段可以看出,我只是接了一个ethcat的从站模块,而且这个模块只是一个简单的8个LED 和8个按键的板子。
至于eeprom的demo 可以用来烧录xml 的bin文件,这里就不去继续演示了。
4.修改代码
这里要修改的代码是依据simpletest 这个demo的。其路径是在 test\linux\simple_test\simple_test.c
这里面是一个简单的主站的测试demo。
主函数的介绍
// ./slaveinfo eth1
int main(int argc, char *argv[])
{
printf("SOEM (Simple Open EtherCAT Master)\nSimple test\n");
if (argc > 1) // 输入参数检验,只支持一个参数的输入
{
/* create thread to handle slave error handling in OP */
// pthread_create( &thread1, NULL, (void *) &ecatcheck, (void*) &ctime);
osal_thread_create(&thread1, 128000, &ecatcheck, (void*) &ctime); // 创建一个监控线程,打印换行符和检测错误信息。
/* start cyclic part */
simpletest(argv[1]); // 开启测试脚本
}
else
{
printf("Usage: simple_test ifname1\nifname = eth0 for example\n");
}
printf("End program\n");
return (0);
}
上面的主函数的主要执行部分其实是在 simpletest 中去实现的这一部分的代码如下:(注释在代码中)
/* 注意 : 这部分代码会看到很多变量第一次出现,我刚开始看得时候也是不知道那些是什么
* 现在大概就是明白 很多的变量是全局变量,可以作用在整个程序的运行空间之内,所以这些参数会在我们执行init 或者是 config 函数的时候被更新
*/
void simpletest(char *ifname) // 这里还是需要网卡 我的是 eth1 主要是用于 初始化函数的
{
int i, j, oloop, iloop, chk;
//needlf = FALSE;
inOP = FALSE;
printf("Starting simple test\n");
/* initialise SOEM, bind socket to ifname */
if (ec_init(ifname)) // 初始化网卡,绑定端口等很多的操作 未深究
{
printf("ec_init on %s succeeded.\n",ifname);
/* find and auto-config slaves */
if ( ec_config_init(FALSE) > 0 ) // 配置从站
{
printf("%d slaves found and configured.\n",ec_slavecount);
ec_config_map(&IOmap);
// 配置 PDO 映射 这个 IOmap我的理解就是一个 内存池,SOEM 会将PDO 的指针 根据从站的 eeprom 内部的 PDO 参数
// 将映射的地址 指向这一片的空间,实验测试中发现 ec_slave[0].outputs[0]的地址 就是指向了IOmap的起始地址
// 所以将其称之为映射是非常合理的!
ec_configdc();// 配置时钟, 还不是很清楚机理
printf("Slaves mapped, state to SAFE_OP.\n");
/* wait for all slaves to reach SAFE_OP state */
ec_statecheck(0, EC_STATE_SAFE_OP, EC_TIMEOUTSTATE * 4); // 切换第1个从站到 OP (operation)模式
// 这段代码应该是初始化的一些操作
oloop = ec_slave[0].Obytes; // 从站1的输出的 长度
if ((oloop == 0) && (ec_slave[0].Obits > 0)) oloop = 1; // 不足一字节按照一字节来算 ??
if (oloop > 8) oloop = 8;
iloop = ec_slave[0].Ibytes;
if ((iloop == 0) && (ec_slave[0].Ibits > 0)) iloop = 1;
if (iloop > 8) iloop = 8;
printf("segments : %d : %d %d %d %d\n",ec_group[0].nsegments ,ec_group[0].IOsegment[0],ec_group[0].IOsegment[1],ec_group[0].IOsegment[2],ec_group[0].IOsegment[3]);
printf("Request operational state for all slaves\n");
expectedWKC = (ec_group[0].outputsWKC * 2) + ec_group[0].inputsWKC;
printf("Calculated workcounter %d\n", expectedWKC);
ec_slave[0].state = EC_STATE_OPERATIONAL;
/* send one valid process data to make outputs in slaves happy*/
ec_send_processdata(); // 发送PDO 数据
ec_receive_processdata(EC_TIMEOUTRET); // 接收PDO数据
/* request OP state for all slaves */
ec_writestate(0); // 切换状态
chk = 200;
/* wait for all slaves to reach OP state */
do
{
ec_send_processdata();
ec_receive_processdata(EC_TIMEOUTRET);
ec_statecheck(0, EC_STATE_OPERATIONAL, 50000);
}
while (chk-- && (ec_slave[0].state != EC_STATE_OPERATIONAL));
// 等待第一个从站的状态切换到OPERATIONAL 或者最多尝试200 次超时
// 这之下就是开始操作的代码了
if (ec_slave[0].state == EC_STATE_OPERATIONAL )
{
printf("Operational state reached for all slaves.\n");
inOP = TRUE;
/* cyclic loop */
for(i = 1; i <= 10000; i++) // 循环执行
{
ec_send_processdata(); // 发送PDO 数据
wkc = ec_receive_processdata(EC_TIMEOUTRET); // 接收PDO数据
// wkc
// LRD(读) 1
// LWR(写) 1
// LRW(读写)—读成功 1
// LRW(读写)—写成功 2
// LRW(读写)—全部完成 3
if(wkc >= expectedWKC) // 这句话的意思应该是 从站的操作完成了
{
printf("Processdata cycle %4d, WKC %d , O:", i, wkc);
for(j = 0 ; j < oloop; j++)
{
printf(" %2.2x", *(ec_slave[0].outputs + j));
}
printf(" I:");
for(j = 0 ; j < iloop; j++)
{
printf(" %2.2x", *(ec_slave[0].inputs + j));
}
printf(" T:%"PRId64"\r",ec_DCtime);
//needlf = TRUE;
}
osal_usleep(5000);
}
inOP = FALSE;
}
else
{
printf("Not all slaves reached operational state.\n");
ec_readstate();
for(i = 1; i<=ec_slavecount ; i++)
{
if(ec_slave[i].state != EC_STATE_OPERATIONAL) // 看看哪个从站没达到状态
{
printf("Slave %d State=0x%2.2x StatusCode=0x%4.4x : %s\n",
i, ec_slave[i].state, ec_slave[i].ALstatuscode, ec_ALstatuscode2string(ec_slave[i].ALstatuscode));
}
}
}
printf("\nRequest init state for all slaves\n");
ec_slave[0].state = EC_STATE_INIT;
/* request INIT state for all slaves */
ec_writestate(0);
}
else
{
printf("No slaves found!\n");
}
printf("End simple test, close socket\n");
/* stop SOEM, close socket */
ec_close();
}
else
{
printf("No socket connection on %s\nExecute as root\n",ifname);
}
}
关于上述的代码的 wkc 部分,我参考了 孔晨星 同志的博客
https://blog.csdn.net/kcx295810/article/details/113128954
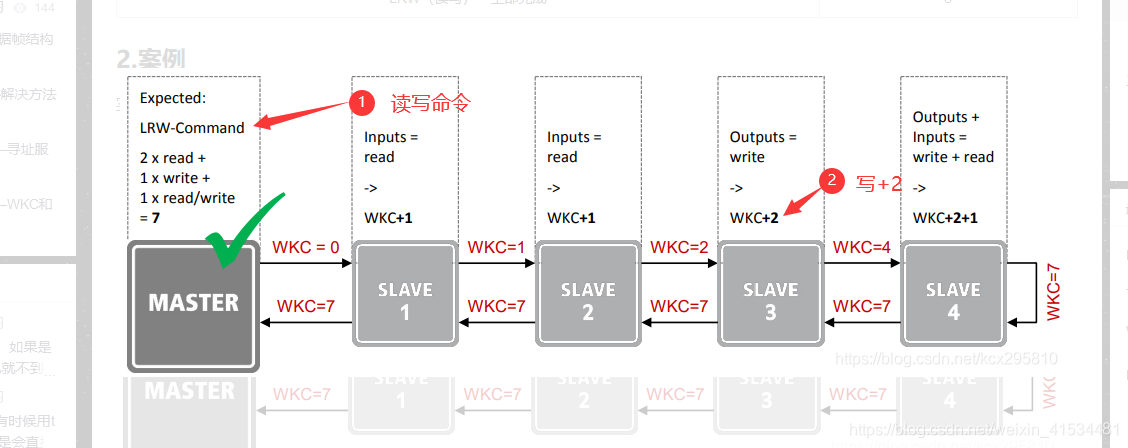
不是很懂这一部分。 以上就是官方的代码了
我自己的代码改动在这里, 主要的内容都在注释里面了
/** \file
* \brief Example code for Simple Open EtherCAT master
*
* Usage : simple_test [ifname1]
* ifname is NIC interface, f.e. eth0
*
* This is a minimal test.
*
* (c)Arthur Ketels 2010 - 2011
*/
#include <stdio.h>
#include <string.h>
#include <inttypes.h>
#include "ethercat.h"
#define EC_TIMEOUTMON 500
char IOmap[4096]; // 个人理解 这里就是给提供了一块内存空间
OSAL_THREAD_HANDLE thread1; // demo 里面的一个 检测线程
OSAL_THREAD_HANDLE thread_freash;// 笔者自己加的 每5ms 就去刷新一下pdo 数据
int expectedWKC;
volatile int wkc;
boolean inOP;
uint8 currentgroup = 0;
// 状态监测线程,主要是监测ethcat 的异常状态?
// 这个线程笔者并没去深究,大概的用途就是去 定时的检测当前从站的在线状态,及时发现从站掉线
OSAL_THREAD_FUNC ecatcheck( void *ptr )
{
int slave;
(void)ptr; /* Not used */
while(1)
{
if( inOP && ((wkc < expectedWKC) || ec_group[currentgroup].docheckstate))
{
/* one ore more slaves are not responding */
ec_group[currentgroup].docheckstate = FALSE;
ec_readstate();// 读取从站状态
for (slave = 1; slave <= ec_slavecount; slave++) // 遍历
{
if ((ec_slave[slave].group == currentgroup) && (ec_slave[slave].state != EC_STATE_OPERATIONAL))
{
ec_group[currentgroup].docheckstate = TRUE;
if (ec_slave[slave].state == (EC_STATE_SAFE_OP + EC_STATE_ERROR))
{
printf("ERROR : slave %d is in SAFE_OP + ERROR, attempting ack.\n", slave);
ec_slave[slave].state = (EC_STATE_SAFE_OP + EC_STATE_ACK);
ec_writestate(slave); // 将指定的状态写到指定的从站之中
}
else if(ec_slave[slave].state == EC_STATE_SAFE_OP)
{
printf("WARNING : slave %d is in SAFE_OP, change to OPERATIONAL.\n", slave);
ec_slave[slave].state = EC_STATE_OPERATIONAL;
ec_writestate(slave);
}
else if(ec_slave[slave].state > EC_STATE_NONE)
{
if (ec_reconfig_slave(slave, EC_TIMEOUTMON))
{
ec_slave[slave].islost = FALSE;
printf("MESSAGE : slave %d reconfigured\n",slave);
}
}
else if(!ec_slave[slave].islost)
{
/* re-check state */
ec_statecheck(slave, EC_STATE_OPERATIONAL, EC_TIMEOUTRET);
if (ec_slave[slave].state == EC_STATE_NONE)
{
ec_slave[slave].islost = TRUE;
printf("ERROR : slave %d lost\n",slave);
}
}
}
if (ec_slave[slave].islost) // 检查从站是否 离线?
{
if(ec_slave[slave].state == EC_STATE_NONE)
{
if (ec_recover_slave(slave, EC_TIMEOUTMON)) // 恢复和从站之间的连接
{
ec_slave[slave].islost = FALSE;
printf("MESSAGE : slave %d recovered\n",slave);
}
}
else
{
ec_slave[slave].islost = FALSE;
printf("MESSAGE : slave %d found\n",slave);
}
}
}
if(!ec_group[currentgroup].docheckstate)
printf("OK : all slaves resumed OPERATIONAL.\n");
}
osal_usleep(10000);
}
}
// PDO 刷新线程,定时的去 收 发 PDO 数据。
OSAL_THREAD_FUNC ecatfreash( void *ptr )
{
(void)ptr;
int i, oloop, iloop, chk; /* Not used */
inOP = FALSE;
char *ifname = "eth1";
if (ec_init(ifname)) // 初始化网卡1 基于野火的 i.mx6ull 这个是右面的那个网卡
{
printf("ec_init on %s succeeded.\n",ifname);
/* find and auto-config slaves */
if ( ec_config_init(FALSE) > 0 ) // 检查是否初始化完成了
{
printf("%d slaves found and configured.\n",ec_slavecount);
ec_config_map(&IOmap); //根据 FMMU 的地址 完成数据的映射。
ec_configdc(); // 配置时钟信息
printf("Slaves mapped, state to SAFE_OP.\n");
/* wait for all slaves to reach SAFE_OP state */
ec_statecheck(0, EC_STATE_SAFE_OP, EC_TIMEOUTSTATE * 4); // 检查当前的状态
oloop = ec_slave[0].Obytes;
if ((oloop == 0) && (ec_slave[0].Obits > 0)) oloop = 1;
if (oloop > 8) oloop = 8;
iloop = ec_slave[0].Ibytes;
if ((iloop == 0) && (ec_slave[0].Ibits > 0)) iloop = 1;
if (iloop > 8) iloop = 8;
printf("segments : %d : %d %d %d %d\n",ec_group[0].nsegments ,ec_group[0].IOsegment[0],ec_group[0].IOsegment[1],ec_group[0].IOsegment[2],ec_group[0].IOsegment[3]);
printf("Request operational state for all slaves\n");
expectedWKC = (ec_group[0].outputsWKC * 2) + ec_group[0].inputsWKC;
printf("Calculated workcounter %d\n", expectedWKC);
ec_slave[0].state = EC_STATE_OPERATIONAL;
/* send one valid process data to make outputs in slaves happy*/
ec_send_processdata();
ec_receive_processdata(EC_TIMEOUTRET);
/* request OP state for all slaves */
ec_writestate(0);
chk = 200;
/* wait for all slaves to reach OP state */
do
{
ec_send_processdata();
ec_receive_processdata(EC_TIMEOUTRET);
ec_statecheck(0, EC_STATE_OPERATIONAL, 50000);
}
while (chk-- && (ec_slave[0].state != EC_STATE_OPERATIONAL)); //等待第一个从站进入到可以操作的状态 或者200个周期没进入 判定为超时
if (ec_slave[0].state == EC_STATE_OPERATIONAL )
{
printf("Operational state reached for all slaves.\n");
inOP = TRUE;
/* cyclic loop */
//for(i = 1; i <= 10000; i++)
while(1) // 笔者的改动之处 线程在这里进行无限的循环,每隔5ms 刷新一下pdo
{
ec_send_processdata();
wkc = ec_receive_processdata(EC_TIMEOUTRET); //
osal_usleep(5000);
}
inOP = FALSE;
}
else
{
printf("Not all slaves reached operational state.\n");
ec_readstate();
for(i = 1; i<=ec_slavecount ; i++)
{
if(ec_slave[i].state != EC_STATE_OPERATIONAL)
{
printf("Slave %d State=0x%2.2x StatusCode=0x%4.4x : %s\n",
i, ec_slave[i].state, ec_slave[i].ALstatuscode, ec_ALstatuscode2string(ec_slave[i].ALstatuscode));
}
}
}
printf("\nRequest init state for all slaves\n");
ec_slave[0].state = EC_STATE_INIT;
/* request INIT state for all slaves */
ec_writestate(0);
}
else
{
printf("No slaves found!\n");
}
}
}
int main(int argc, char *argv[])
{
printf("SOEM (Simple Open EtherCAT Master)\nSimple test\n");
if (argc > 1)
{
/* create thread to handle slave error handling in OP */
// pthread_create( &thread1, NULL, (void *) &ecatcheck, (void*) &ctime);
osal_thread_create(&thread1, 128000, &ecatcheck, NULL);
/* start cyclic part */
// simpletest(argv[1]);
osal_thread_create(&thread_freash, 128000, &ecatfreash, NULL);
// 这里需要等待一段时间,让刷新现成初始化好
while( ec_slave[0].outputs == 0); // 这个等待是必须的, 因为创建的子线程 ecatfreash 需要一段时间才能完成初始化工作
while(1)
{
ec_slave[0].outputs[0] = ec_slave[0].inputs[0]; // 将第一个从站的 输入 等于输出
// 显示的效果上面就是 我按下按键之后 从站上的灯就会亮起
// 测试使用的从站模块是只有8个LED 和 8个 按键的模块。
osal_usleep(5000);
}
}else
{
printf("Usage: simple_test ifname1\nifname = eth0 for example\n");
}
ec_close();
printf("End program %s\n",argv[0]);
return (0);
}
5.测试效果
运行的效果就是按下板载的按键 S5 对应的D5 亮起
其余的按键也是一样的 S1 按下 D1 亮起

















 172
172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









