







 本文介绍了两相混合式步进电机的驱动原理,包括其结构、正反转通电顺序以及主电路运行原理。接着,详细探讨了控制方法,特别是细分控制的优势,如降低步距角、提高输出转矩和抑制低频振荡。文章还讨论了电流控制和位置规划算法,确保电机在不同工况下的稳定运行。
本文介绍了两相混合式步进电机的驱动原理,包括其结构、正反转通电顺序以及主电路运行原理。接着,详细探讨了控制方法,特别是细分控制的优势,如降低步距角、提高输出转矩和抑制低频振荡。文章还讨论了电流控制和位置规划算法,确保电机在不同工况下的稳定运行。
1、步进电机驱动原理
2、控制方法
1、步进电机驱动原理
二相混合式步进电机的结构
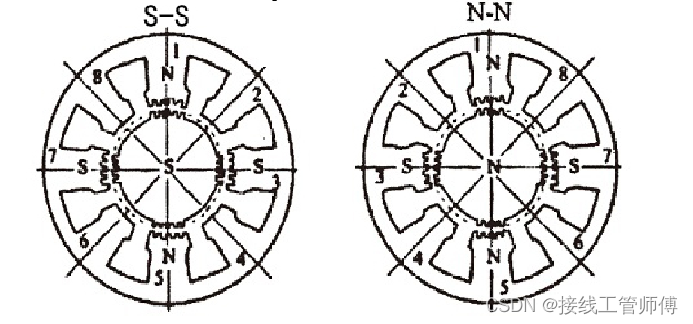
一般定子上有 8 个磁极,彼此不紧贴的 4 个磁极为一绕组。
单数的 4 个磁极便构成步进电机的 A 相,双数的 4 个磁极便构成步进电机的 B 相。绕组以固定的模式进行环绕,让一相中的 2 个磁极,工作状态下拥有一样的吸引力或者排斥力。
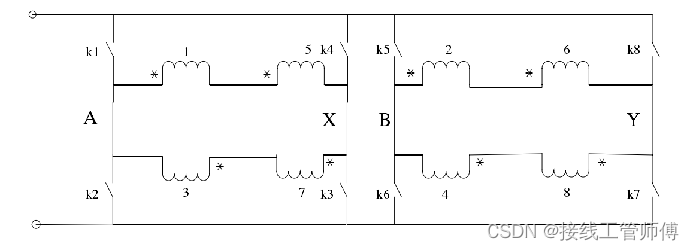
两相混合步进电机绕组连接图
正转通电顺序为:A+B+、A-B+、A-B-、A+B- ;反转通电顺序为:A+B+、A+B-、A-B-、A-B+
线圈 1 和线圈 5 串联,线圈 3 和线圈 7 串联。当开关 k1 和 k3 闭合时,定子上的磁极 3 与磁极 7 呈 S 极、磁极 1 与磁极 5 呈 N极。当开关 k2 和 k4 闭合时,各个线圈中电流反向,产生的感应磁场反向,即磁极 3 与磁极 7 呈 N 极、磁极 1 与磁极 5 呈 S 极。
二相混合式步进电机步中,步进电机的 S 极转子,与定子的 S 极磁极反映的磁力是呈现斥力的状态,而它与定子的 N 极,却是呈现吸力的状态;这些力的合力,推动了转子的转动。
故而只要单次供电,转子便会完成一个旋转动作,同时转过 1/4 个齿距角。要求转子完整地旋转一个齿距角,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









