







一个简单的获取系统时间的代码,头文件也对,在windows下跑了没问题。但在ROS中就报错,最后发现是C++标准的问题。
#include <iostream>
#include <chrono>
#include <ctime>
using namespace std;
int main()
{
// 获取当前时间点
std::chrono::system_clock::time_point now = std::chrono::system_clock::now();
// 将当前时间转换为 std::time_t 类型
std::time_t time = std::chrono::system_clock::to_time_t(now);
// 输出当前时间
std::cout << "The current time is " << std::ctime(&time);
return 0;
}
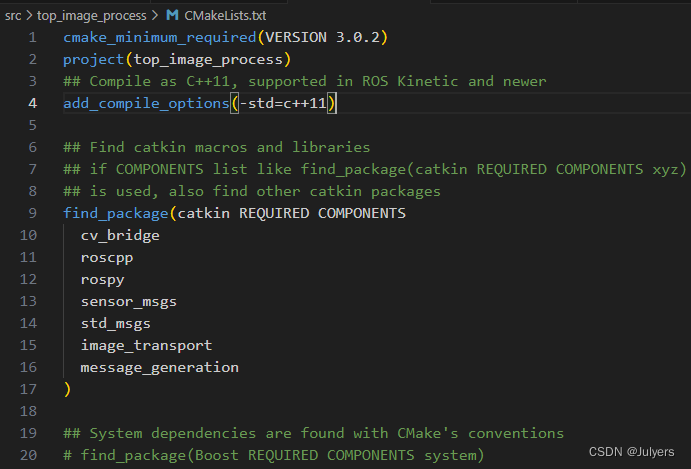
std::chrono::system_clock需要C++11标准,在功能包的CmakeList.txt中添加add_compile_options(-std=c++11)就可以了。














 1270
1270











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









