







文章目录
前言
工作接触到RS485通信和Modbus协议,借此记录一下,在产品开发当中,Modbus协议在工控领域也比较常用。
另外附stm32串口12345初始化程序。
一、相关介绍
1.1 Modbus协议简介
modbus协议就是定义了一套信息交互的协议,让收发双方更好地通信(相互知道对方传过来的数据是什么)。
数据帧元素有:从机地址(8 bit):选择从机;功能码(8 bit):功能定义(对应功能是什么);寄存器地址(16 bit):数据存放地址;寄存器数量(16 bit);数据字节数(8 bit);数据位(可变);CRC校验(16 bit)。
有了这些定义之后,主从机双方就知道对方发过来的消息是什么了,协议中的寄存器可以简单理解为数组吧,也可以理解为单片机里对应的寄存器,每个寄存器对应一个地址(简单来说,寄存器包含元素:16bit地址+16bit数据)。
modbus定义了四种存储类型:输入线圈、输出线圈、输入寄存器、保持寄存器,其中线圈都是布尔量,也就是0 or 1,用于状态反馈和开关状态,寄存器则是存放16位数据,可以写一些参数。
有三种协议模式,ASCII、RTU、TCP,一般使用RTU模式比较多,报文的发送数据比ASCII模式少。
比较常用的功能码是(十六进制):01 读线圈,02 读输入离散量, 03 读多个寄存器,04 读输入寄存器, 05 写单个线圈,06 写单个寄存器,0F 写多个线圈,10 写多个寄存器。
再详细的介绍找下其他博文就行。
1.2 485通信介绍
485通信,由于TTL信号的RX、TX信号转485两路差分信号,因此它是一个半双工通信,针对modbus通信,最好就是一问(发)一答(收)再一问一答的通信方式,避免信号阻塞。
485通信,单片机底层就是配置串口,发送数据对应串口协议,一位起始位+5-8位数据位+奇偶校验位(一般无)+停止位(一般1位),也就是发送一个8bit数据需要发10bit(10个高低电平信号),串口波特率对应就是1s内发多少个bit,9600bps就是一秒内发9600个位。
硬件外围用一个sp3485芯片,将ttl电平信号转485信号就好了。A+、B-通信线缆上通常终端匹配120Ω的电阻,线缆的末尾处各一个。
*注意:在空闲时,RS485电平转换芯片应处在接受状态,即芯片方向引脚端输出接收状态的对应电平。
1.3 CRC校验
modbus协议采用的是CRC-16校验方式。
CRC-16多项式表达式为:G(x) = x^16 + x^15 + x^2 + 1,对应值16位值为:0x8005
CRC校验步骤如下:

CRC-16-MODBUS涉及一个输入数据和输出数据反转概念。
输入数据反转:即在计算开始前,将需要校验的数据反转,如数据位1011,反转后为1101。
输出数据反转:即在计算结束后,与结果异或值异或之前,计算值反转,如计算结果为1011,反转后为1101。
这样每次计算都会作两次反转,因此代码将非常耗时,所以将0x8005按位颠倒成0xA001进行异或,最后将结果高低位互换输出,这种颠倒操作有助于简化计算过程和提高算法效率。
”按位颠倒“是指将0x8005,二进制表示为 0b1000 0000 | 0000 0101,按’|'为中心对称进行颠倒后的结果为0b1010 0000 | 0000 0001,即0xA001。
二、代码流程
串口相关
1 串口发送函数

2 串口接收中断函数

3 接收数据处理函数

关于单次发送、接收、校验连续性问题(就是确保每次都是一发一收的方式)
设定一个接收标志位,如图,圆圈为标志位的状态,在每处函数执行完触发状态变换,每个函数(发送、接收、处理)执行前需判断标志位状态才执行。

三、程序实现
注:下面代码仅作部分展示说明,代码详见目录-四、完整代码
1.配置串口(stm32底层)
- 使能对应时钟:如串口2,使能引脚时钟:RCC_APB2Periph_GPIOA;串口2使能:RCC_APB1Periph_USART2
- 配置引脚模式:TX引脚:GPIO_Mode_AF_PP(复用推挽);RX引脚:GPIO_Mode_IN_FLOATING(浮空输入)、485还有一个收发方向的引脚定义
- 串口配置:波特率、8位数据位、1位停止位、无校验、收发模式、软件流控制
- 中断配置:USART2_IRQn 中断通道,主、次优先级,接收中断
串口、引脚初始化:
/**
* @brief 串口2初始化 485通信
* @param baud 波特率
* @retval None
*/
void uart2_init(u32 baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //485_DR
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_ResetBits(GPIOA, GPIO_Pin_0); //默认接收方向
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init( &NVIC_InitStructure );
USART_DeInit(USART2); //复位串口2
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init( USART2, &USART_InitStructure );
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
USART_ITConfig(USART2,USART_IT_RXNE, ENABLE); //使能串口2接收中断
USART_Cmd( USART2, ENABLE ); //使能串口2
}
中断服务函数:
串口中断服务函数执行流程图:

/**
* @brief 串口1中断服务程序
* @param None
* @retval None
*/
void USART1_IRQHandler(void)
{
u8 res = 0;
if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET)
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
res = USART_ReceiveData(USART1); //读接收到的字节,同时相关标志自动清除
if(RS485_RX_CNT < RS485_BUFF_SIZE)
{
//接受数据
RS485_RX_BUFF[RS485_RX_CNT]=res; //数组缓存定义在modbus.c
RS485_RX_CNT++;
//tim7空闲标志喂狗
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除定时器溢出中断
TIM_SetCounter(TIM7,0);//当接收到一个新的字节,将定时器7复位为0,重新计时(相当于喂狗)
TIM_Cmd(TIM7,ENABLE);//开始计时
}
rs485_bus_state = BUS_BUSY; //串口忙
rs485_recv_flag = RECV_ING; //接收中
}
}
串口发送函数:
/**
* @brief 发送n个字节数据 主机将数据进行发送
* @param buff: 发送区首地址
len: 字节长度
* @retval
*/
void uart1_sendbytes(u8 *buff, u8 len)
{
/* 总线空闲 */
if(rs485_bus_state == BUS_IDLE)
{
//RS485传输方向为发送
MDMSerialSWRecv_Send(RS485_TX);
rs485_bus_state = BUS_BUSY; //串口忙
while(len--)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待发送区为空
USART_SendData(USART1,*(buff++));
}
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //等待发送完成
rs485_sc_flag = SEND_OVER; //发送结束
MDMSerialSWRecv_Send(RS485_RX); //RS485传输方向为接收
rs485_recv_flag = WAIT_RECV; //等待接收
rs485_bus_state = BUS_IDLE; //串口空闲
//tim7空闲标志喂狗
TIM_ClearITPendingBit(TIM7, TIM_IT_Update);//清除定时器溢出中断
TIM_SetCounter(TIM7,0);//当接收到一个新的字节,将定时器7复位为0,重新计时(相当于喂狗)
TIM_Cmd(TIM7,ENABLE);//开始计时
}
}
2.Modbus
本文写的是主机思路
CRC校验:代码可参考此博主的Modbus-crc16校验原理和方法(含测试代码以及演算过程)
定时器初始化:用于判断接收帧是否结束(4ms内若没有进入串口中断进行计数复位,将进入定时器中断将定时器关闭且转为发送模式)

//
//定时器7初始化 BEGIN
//
/**
* @brief 定时器7初始化---功能:判断从机返回的数据是否接受完成
* @param None
* @retval None
*/
void Timer7_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM7, ENABLE); //TIM7时钟使能
//TIM7初始化设置
TIM_TimeBaseStructure.TIM_Period = RS485_FRAME_MS_INT*10; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =7199; //设置用来作为TIMx时钟频率除数的预分频值 设置计数频率为10kHz
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM7, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_Cmd(TIM7,DISABLE);
TIM_ITConfig( TIM7, TIM_IT_Update, ENABLE);//TIM7 允许更新中断
//TIM7中断分组配置
NVIC_InitStructure.NVIC_IRQChannel = TIM7_IRQn; //TIM7中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
/**
* @brief 定时器7中断服务程序
用定时器7判断接收空闲时间,当空闲时间大于指定时间,认为一帧结束
* @param None
* @retval None
*/
void TIM7_IRQHandler(void)
{
if(TIM_GetITStatus(TIM7,TIM_IT_Update) != RESET)
{
TIM_Cmd(TIM7,DISABLE); //停止定时器
MDMSerialSWRecv_Send(RS485_TX); //停止接收,切换为发送状态
rs485_bus_state = BUS_IDLE; //总线空闲,主机处在发送状态
rs485_recv_flag = RECV_OVER; //接收完成标志位
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除中断标志
}
}
功能码发送函数:
头文件声明:
#define HI(n) ((n)>>8)
#define LOW(n) ((n)&0xff)
/**
* @brief MODBUS功能码
* @param None
* @retval None
*/
enum modbus_funcode
{
READ_COIL = 1, //读线圈状态
READ_DI = 2, //读离散输入状态
READ_HLD_REG = 3, //读保持寄存器
READ_AI = 4, //读输入寄存器
SET_COIL = 5, //写单个线圈
SET_HLD_REG = 6, //写单个保持寄存器
WRITE_COIL = 15, //写多个线圈
WRITE_HLD_REG = 16 //写多个保持寄存器
};
各个功能码对应数据存入数组:
/**
* @brief Modbus功能码01处理程序,
读线圈
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
reg_num : 寄存器数目
* @retval 返回数组长度
*/
static u8 Master_01_Slove(u8 board_adr, u16 reg_addr, u16 reg_num)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = READ_COIL; //modbus 01
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(reg_num);
RS485_TX_BUFF[n++] = LOW(reg_num);
calCRC = CRC_Compute(RS485_TX_BUFF, 6);
RS485_TX_BUFF[n++] = (calCRC >> 8) & 0xFF;
RS485_TX_BUFF[n++] = (calCRC) & 0xFF;
return n;
}
/**
* @brief Modbus功能码02处理程序,
读离散输入状态
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
reg_num : 寄存器数目
* @retval None
*/
static u8 Master_02_Slove(u8 board_adr, u16 reg_addr, u16 reg_num)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = READ_DI; //modbus 02
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(reg_num);
RS485_TX_BUFF[n++] = LOW(reg_num);
calCRC = CRC_Compute(RS485_TX_BUFF, 6);
RS485_TX_BUFF[n++] = (calCRC >> 8) & 0xFF;
RS485_TX_BUFF[n++] = (calCRC) & 0xFF;
return n;
}
/**
* @brief Modbus功能码03处理程序,
读保持寄存器,发送完东西开始接收
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
reg_num : 寄存器数目
* @retval None
*/
static u8 Master_03_Slove(u8 board_adr, u16 reg_addr, u16 reg_num)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = READ_HLD_REG; //modbus 指令码03
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(reg_num);
RS485_TX_BUFF[n++] = LOW(reg_num);
calCRC = CRC_Compute(RS485_TX_BUFF, 6);
RS485_TX_BUFF[n++] = (calCRC >> 8) & 0xFF;
RS485_TX_BUFF[n++] = (calCRC) & 0xFF;
return n;
}
/**
* @brief Modbus功能码04处理程序
读输入寄存器,发送完东西开始接收
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
reg_num : 寄存器数目
* @retval None
*/
static u8 Master_04_Slove(u8 board_adr, u16 reg_addr, u16 reg_num)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = READ_AI; //modbus 指令码04
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(reg_num);
RS485_TX_BUFF[n++] = LOW(reg_num);
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[n++] = (calCRC>>8)&0xFF;
RS485_TX_BUFF[n++] = (calCRC)&0xFF;
return n;
}
/**
* @brief Modbus功能码05处理程序
写单个线圈
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
coil_s : 数据 0xff00 / 0x0000 = 线圈状态ON / 线圈状态OFF
* @retval None
*/
static u8 Master_05_Slove(u8 board_adr, u16 reg_addr, u16 coil_s)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = SET_COIL;
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(coil_s);
RS485_TX_BUFF[n++] = LOW(coil_s);
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[n++] = (calCRC>>8)&0xFF;
RS485_TX_BUFF[n++] = (calCRC)&0xFF;
return n;
}
/**
* @brief Modbus功能码06处理程序
写单个保持寄存器
* @param
board_adr : 目标从机地址
reg_addr : 寄存器地址
data : 数据
* @retval None
*/
static u8 Master_06_Slove(u8 board_adr,u16 reg_addr, u16 data)
{
u16 calCRC;
u8 n = 0;
RS485_TX_BUFF[n++] = board_adr;
RS485_TX_BUFF[n++] = SET_HLD_REG; //modbus 指令码06
RS485_TX_BUFF[n++] = HI(reg_addr);
RS485_TX_BUFF[n++] = LOW(reg_addr);
RS485_TX_BUFF[n++] = HI(data);
RS485_TX_BUFF[n++] = LOW(data);
calCRC = CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[n++] = (calCRC>>8)&0xFF;
RS485_TX_BUFF[n++] = (calCRC)&0xFF;
return n;
}
/**
* @brief Modbus功能码16处理程序
写多个寄存器
* @param board_adr :目标从机地址
reg_addr :寄存器地址
reg_num :寄存器数目
byte_num :字节数
*data :数据指针
* @retval 返回需要发送的数据长度
*/
static u8 Master_16_Slove(u8 board_adr,u16 reg_addr, u16 reg_num, u8 byte_num, u8 *data)
{
u16 calCRC;
u8 i;
u8 j = 0;
RS485_TX_BUFF[j++] = board_adr;
RS485_TX_BUFF[j++] = WRITE_HLD_REG; //modbus功能码:16
RS485_TX_BUFF[j++] = HI(reg_addr);
RS485_TX_BUFF[j++] = LOW(reg_addr);
RS485_TX_BUFF[j++] = HI(reg_num);
RS485_TX_BUFF[j++] = LOW(reg_num);
RS485_TX_BUFF[j++] = byte_num;
for(i = 0; i < byte_num; i++)
{
RS485_TX_BUFF[j++] = *data++;
}
calCRC = CRC_Compute(RS485_TX_BUFF, j);
RS485_TX_BUFF[j++] = (calCRC>>8)&0xFF;
RS485_TX_BUFF[j++] = (calCRC)&0xFF;
return j;
}
将以上功能码整合成一个发送函数:
/**
* @brief 主机发送数据函数
* @param md_stu 发送结构体
board_adr :从机地址
funcode :功能码
reg_addr :寄存器地址
reg_num :寄存器数量 or 寄存器值
byte_num :字节数
*data :发送数据指针
* @retval SEND_SUCCESS:发送成功
SEND_FALSE:发送失败
*/
u8 mm_send_data( SenddataSTU *md_stu,
u8 board_adr,
u8 funcode,
u16 reg_addr,
u16 reg_num,
u8 byte_num,
u8 *data)
{
u8 buff_n;
if(rs485_recv_flag == WAIT_SEND && comm_error_flag == 0) //等待发送 且 通信错误标志位没有置位
{
//将发送信息赋值到结构体中
md_stu->slave_id = board_adr; //目标地址
md_stu->fun_code = funcode; //功能码
md_stu->reg_addr = reg_addr; //寄存器地址
md_stu->reg_num = reg_num; //寄存器数量
md_recvdata_stu.crcflag = CRC_WAIT; //crc等待校验
rs485_sc_flag = WAIT_SEND; //等待发送
switch(funcode) //根据不同的功能码进行处理
{
case READ_COIL: //1 读线圈状态
{
buff_n = Master_01_Slove(board_adr, reg_addr, reg_num);
break;
}
case READ_DI: //2 读离散输入状态
{
buff_n = Master_02_Slove(board_adr, reg_addr, reg_num);
break;
}
case READ_HLD_REG: //3 读保持寄存器
{
buff_n = Master_03_Slove(board_adr, reg_addr,reg_num);
break;
}
case READ_AI: //4 读输入寄存器
{
buff_n = Master_04_Slove(board_adr, reg_addr, reg_num);
break;
}
case SET_COIL: //5 写单个线圈
{
buff_n = Master_05_Slove(board_adr, reg_addr,reg_num);
break;
}
case SET_HLD_REG: //6 写单个保持寄存器
{
buff_n = Master_06_Slove(board_adr,reg_addr, reg_num);
break;
}
case WRITE_HLD_REG: //16 写多个保持寄存器
{
buff_n = Master_16_Slove(board_adr, reg_addr, reg_num, byte_num, data);
break;
}
}
md_send_bytes(RS485_TX_BUFF, buff_n); //
md_stu->data_update = UPDATE; // 更新标志位
single_send_ver_flag = 1; // 单次发送校验标志位置1
rs485_sc_flag = SEND_OVER; // 发送结束
return SEND_SUCCESS;
}
return SEND_FALSE;
}
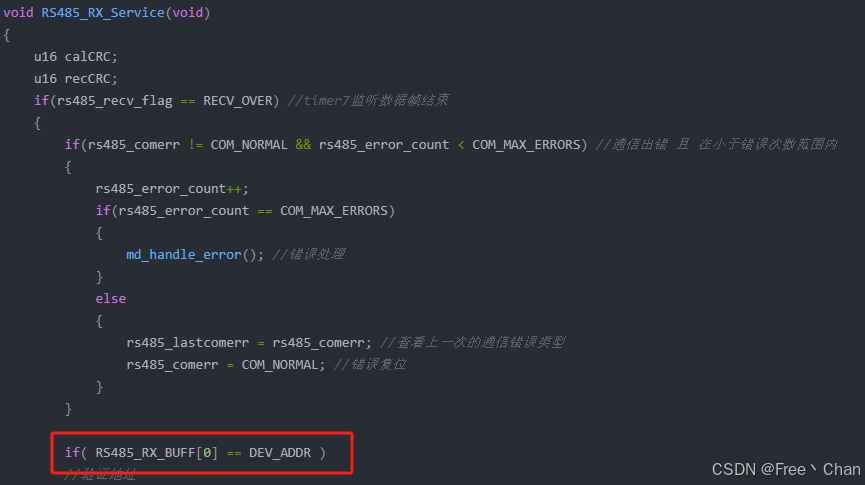
接收处理函数:
/**
* @brief RS485服务程序,用于处理接收到的数据(请在主函数中循环调用)
* @param None
* @retval None
*/
void RS485_RX_Service(void)
{
u16 calCRC;
u16 recCRC;
if(rs485_recv_flag == RECV_OVER) //timer7监听数据帧结束
{
if(rs485_comerr != COM_NORMAL && rs485_error_count < COM_MAX_ERRORS) //通信出错 且 在小于错误次数范围内
{
rs485_error_count++;
if(rs485_error_count == COM_MAX_ERRORS)
{
md_handle_error(); //错误处理
}
else
{
rs485_lastcomerr = rs485_comerr; //查看上一次的通信错误类型
rs485_comerr = COM_NORMAL; //错误复位
}
}
if( RS485_RX_BUFF[0] == DEV_ADDR )
//验证地址
{
//验证功能码且正确
if(IS_FUNCODE(RS485_RX_BUFF[1]))
{
if(RS485_RX_CNT > 2)
{
//CRC校验比对
calCRC = CRC_Compute(RS485_RX_BUFF, (RS485_RX_CNT - 2));//计算所接收数据的CRC
recCRC = RS485_RX_BUFF[RS485_RX_CNT-1] | (RS485_RX_BUFF[RS485_RX_CNT-2]<<8); //接收到的CRC(低字节在前,高字节在后)
}
if(calCRC == recCRC)//CRC校验正确
{
md_recvdata_stu.crcflag = CRC_PASS; //此标志位用于判断发送成功后,从机成功响应且校正通过
Recv_data_process(RS485_RX_BUFF, RS485_RX_CNT, &md_recvdata_stu);//赋值结构体,方便下面处理
modbus_data_process(&md_senddata_stu, &md_recvdata_stu);//对函数数据处理
}
else //CRC校验错误
{
md_recvdata_stu.crcflag = CRC_FALSE; //此标志位用于判断发送成功后有响应且校正通过
rs485_comerr = CRC_ERROR; //CRC校验错误
}
}
else//功能码错误
{
rs485_comerr = FUNCODE_ERR; //功能码错误
}
}
if(RS485_RX_CNT == 0) //出现了发送没有返回的现象添加
{
rs485_comerr = COM_OVERTIME; //通信超时
}
if(rs485_comerr == COM_NORMAL) //通信正常
{
if(rs485_error_count > 0 && rs485_error_count < COM_MAX_ERRORS) // 0 < 错误次数 < COM_MAX_ERRORS
{
rs485_error_count = 0; //证明前面通信有出错,但在错误范围内恢复
}
single_send_ver_flag = 0; //单次发送校验标志位清零
}
else
{
single_send_ver_flag = 2; // 校验不通过
}
rs485_recv_flag = WAIT_SEND; // 等待下一帧发送
RS485_RX_CNT = 0; // 接收计数器清零
MDMSerialSWRecv_Send(RS485_TX);// 切换为发送状态
}
}
结构体赋值:(方便处理数据)
/**
* @brief 将从机返回的数据存放在结构体中便于数据分析处理
* @param data_p 数据指针
datalen 数据长度
md_stu 接收数据结构体
* @retval None
*/
u8 Recv_data_process(u8 *data_p, u16 datalen, RecvdataSTU *md_stu)
{
u16 i = 0;
u8 *databuff;
u8 v_hi, v_lo;
if(data_p == NULL) return 0;
if(datalen >= RS485_BUFF_SIZE) return 0;
databuff = md_stu->data_point; //定义数据指针
md_stu->slave_id = *data_p++; //从机地址
md_stu->fun_code = *data_p++; //功能码
switch(md_stu->fun_code) //根据不同的功能码进行处理
{
case READ_COIL: //1 读线圈状态
{
md_stu->byte_num = *data_p++; //返回的字节数
if(md_stu->byte_num > RECVD_BUFF_LIMIT) return 0;
for(i = 0; i < md_stu->byte_num; i++) //线圈数据 8bit
{
*databuff++ = *data_p++;
}
break;
}
case READ_DI: //2 读离散输入状态
{
md_stu->byte_num = *data_p++; //返回的字节数
if(md_stu->byte_num > RECVD_BUFF_LIMIT) return 0;
for(i = 0; i < md_stu->byte_num; i++) //返回数据 8bit
{
*databuff++ = *data_p++;
}
break;
}
case READ_HLD_REG: //3 读保持寄存器
{
md_stu->byte_num = *data_p++; //返回的字节数
if(md_stu->byte_num > RECVD_BUFF_LIMIT) return 0;
for(i = 0; i < md_stu->byte_num; i++) //返回数据 寄存器数据16bit
{
*databuff++ = *data_p++;
}
break;
}
case READ_AI: //4 读输入寄存器
{
md_stu->byte_num = *data_p++; //返回的字节数
if(md_stu->byte_num > RECVD_BUFF_LIMIT) return 0;
for(i = 0; i < md_stu->byte_num; i++) //返回数据 寄存器数据16bit
{
*databuff++ = *data_p++;
}
break;
}
case SET_COIL: //5 写单个线圈
{
v_hi = *data_p++;
v_lo = *data_p++;
md_stu->reg_addr = (v_hi << 8) | v_lo; //寄存器地址
*databuff++ = *data_p++; //返回的数据 2字节
*databuff = *data_p;
break;
}
case SET_HLD_REG: //6 写单个保持寄存器
{
v_hi = *data_p++;
v_lo = *data_p++;
md_stu->reg_addr = (v_hi << 8) | v_lo; //寄存器地址
*databuff++ = *data_p++; //返回的数据 2字节
*databuff = *data_p;
break;
}
case WRITE_HLD_REG: //16 写多个保持寄存器
{
v_hi = *data_p++;
v_lo = *data_p++;
md_stu->reg_addr = (v_hi << 8) | v_lo; //获取寄存器地址
v_hi = *data_p++;
v_lo = *data_p++;
md_stu->reg_num = (v_hi << 8) | v_lo; //获取字节数
break;
}
}
if(md_senddata_stu.data_update == UPDATE)
md_stu->data_update = UPDATE;
return 1;
}
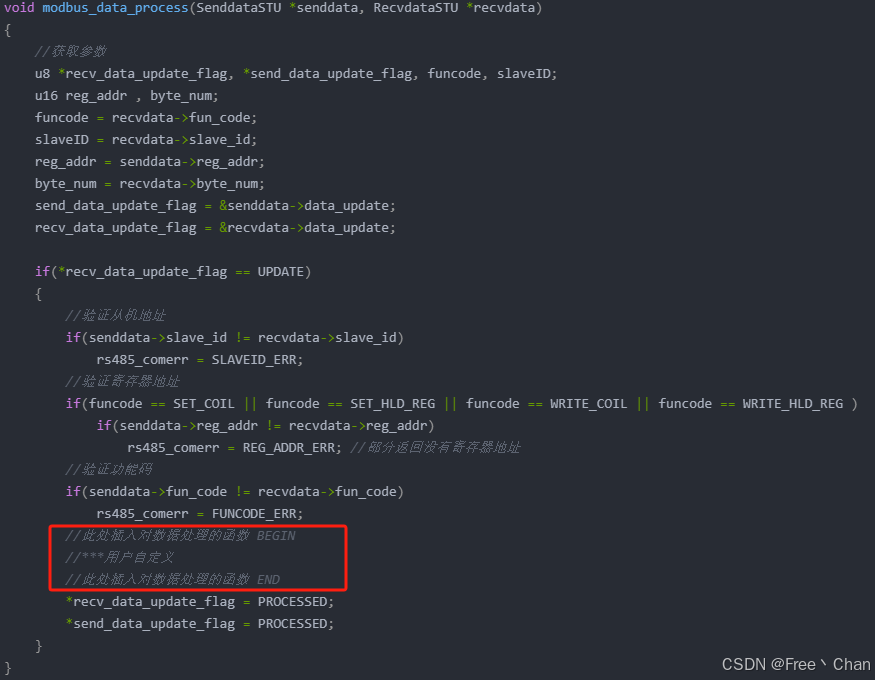
数据处理:传入发送数据结构体与接收数据结构体用于校验对比

/**
* @brief 数据处理
* @param senddata:发送数据存放结构体, recvdata:接收数据存放结构体
* @retval None
*/
void modbus_data_process(SenddataSTU *senddata, RecvdataSTU *recvdata)
{
//获取参数
u8 *recv_data_update_flag, *send_data_update_flag, funcode, slaveID;
u16 reg_addr , byte_num;
funcode = recvdata->fun_code;
slaveID = recvdata->slave_id;
reg_addr = senddata->reg_addr;
byte_num = recvdata->byte_num;
send_data_update_flag = &senddata->data_update;
recv_data_update_flag = &recvdata->data_update;
if(*recv_data_update_flag == UPDATE)
{
//验证从机地址
if(senddata->slave_id != recvdata->slave_id)
rs485_comerr = SLAVEID_ERR;
//验证寄存器地址
if(funcode == SET_COIL || funcode == SET_HLD_REG || funcode == WRITE_COIL || funcode == WRITE_HLD_REG )
if(senddata->reg_addr != recvdata->reg_addr)
rs485_comerr = REG_ADDR_ERR; //部分返回没有寄存器地址
//验证功能码
if(senddata->fun_code != recvdata->fun_code)
rs485_comerr = FUNCODE_ERR;
//此处插入对数据处理的函数 BEGIN
//***用户自定义
//此处插入对数据处理的函数 END
*recv_data_update_flag = PROCESSED;
*send_data_update_flag = PROCESSED;
}
}
四、完整代码
1.使用说明
- 在void RS485_RX_Service(void)添加对应地址
示例:
if( RS485_RX_BUFF[0] == M1_ADDR ||
RS485_RX_BUFF[0] == M2_ADDR ||
RS485_RX_BUFF[0] == M3_ADDR )
- 在modbus_data_process添加对应需要对返回数据处理的函数
示例:
if(slaveID == M1_ADDR || slaveID == M2_ADDR)
dev_data_process(slaveID, funcode, reg_addr, byte_num, *recvdata->data_point);
-
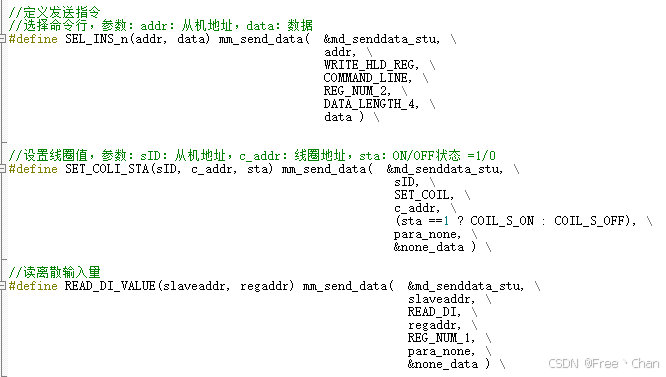
发送函数示例:
-
main函数使用
示例:
1.初始化
RS485_init(); //初始化
2.while调用
RS485_RX_Service(); //modbus接收数据处理
附:STM32串口1-5初始化
1.引脚分配
| 串口 | TX | RX |
|---|---|---|
| 串口1 | PA9 | PA10 |
| 串口2 | PA2 | PA3 |
| 串口3 | PB10 | PB11 |
| 串口4 | PC10 | PC11 |
| 串口5 | PC12 | PD2 |
2.串口初始化程序
以下初始化为485串口初始化,除了初始化串口TX、RX外还初始化了一个DR引脚,自己做筛选。
USART1
见三.1
USART2
/**
* @brief 串口2初始化 485通信
* @param baud 波特率
* @retval None
*/
void uart2_init(u32 baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //485_DR
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
RS485_COM2_TX_EN = 0; //默认接收方向
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init( &NVIC_InitStructure );
USART_DeInit(USART2); //复位串口2
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init( USART2, &USART_InitStructure );
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
USART_ITConfig(USART2,USART_IT_RXNE, ENABLE); //使能串口2接收中断
USART_Cmd( USART2, ENABLE ); //使能串口2
}
USART3
/**
* @brief 串口3初始化 485通信
* @param baud 波特率
* @retval None
*/
void uart3_init(u32 baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART3, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //PB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PB1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //485_DR
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_ResetBits(GPIOB, GPIO_Pin_1); //默认接收方向
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init( &NVIC_InitStructure );
USART_DeInit(USART3); //复位串口3
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(USART3, &USART_InitStructure);
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //使能串口3接收中断
USART_Cmd(USART3, ENABLE); //使能串口3
}
UART4
/**
* @brief 串口4初始化 485通信
* @param baud 波特率
* @retval None
*/
void uart4_init(u32 baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_AFIO, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_UART4, ENABLE );
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PC10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //PC11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //PA15
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //485_DR
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_ResetBits(GPIOA, GPIO_Pin_15); //默认接收方向
NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_DeInit(UART4); //复位串口4
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(UART4, &USART_InitStructure);
USART_ClearITPendingBit(UART4, USART_IT_RXNE);
USART_ITConfig(UART4, USART_IT_RXNE, ENABLE); //使能串口4接收中断
USART_Cmd(UART4, ENABLE); //使能串口4
}
UART5
/**
* @brief 串口5初始化
* @param baud 波特率
* @retval None
*/
void uart5_init(u32 baud)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOD, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_UART5, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PC12
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOC, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PD2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOD, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //PB3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //485_DR
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_InitStructure );
GPIO_ResetBits( GPIOB, GPIO_Pin_3); //默认接收方向
NVIC_InitStructure.NVIC_IRQChannel = UART5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_DeInit(UART5); //复位串口5
USART_InitStructure.USART_BaudRate = baud;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_Init(UART5, &USART_InitStructure);
USART_ClearITPendingBit(UART5, USART_IT_RXNE);
USART_ITConfig(UART5, USART_IT_RXNE, ENABLE); //使能串口5接收中断
USART_Cmd(UART5, ENABLE); //使能串口5
}
总结
记录MODBUS开发过程,涉及串口通信、485通信等相关知识,篇幅太长筛选一部分说明,完整代码已上传。(仅个人记录,若侵权删)

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









