






-
垂直泊车规划简介
垂直泊车即车辆由一定位置,通过横向运动和纵向运动,使得车辆由初始位置,最终垂直停到车位内。车辆检测完车位后,并停车结束后,需要对车辆进行轨迹规划。轨迹规划的目的是为了给出最佳的泊车入位路线,兼顾泊车时间小、泊车效率高、安全性高、舒适性好、轮胎磨损小等性能。根据规划轨迹,控制系统控制转向系统、制动系统和驱动系统沿着规划轨迹准确进入车位,同时避开障碍物。下图为一例垂直泊车时的轨迹。
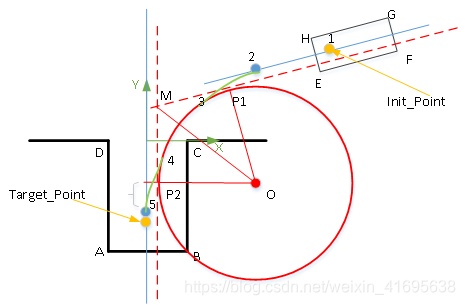
图1 垂直泊车轨迹规划例图
泊车过程中曲线包括三种,直线、过渡曲线(渐变曲率)和圆弧。其中过渡曲线是为了避免原地打方向盘,减少轮胎磨损。通过合理的曲线计算,保证车辆顺利泊车入位。 -
垂直泊车计算相关理论
2.1 一次进库计算方法
车辆一次进库,即车辆由起始点位姿Init_Point通过一次后退停在库内Target_Point,中间没有停车换向。如下图所示,车辆先走一段直线,然后进入圆弧段,在车辆航向角与车位平行时直线后退至目标停车位,完成一次泊车入库。
首先澄清关于以多大半径入库的问题,这里限定一次入库的圆弧半径为最小转弯半径,因为如果以其他半径能入库,那么以最小转弯半径也一定能入库,无非是切点P1,P2的位置不同。Target_Point位置为(0,l_r+Margin_Rear-L)),l_r为车辆后轴到车尾的距离,Margin_Rear为安全距离,L为车库位长度,W为车库位宽度,b为后轮距。
根据前面文章提到的回旋线理论,直线与圆弧过渡应提前S/2转向,即得到提前打方向盘的位置点2和3。由于以最小半径去打方向盘,偏移的切垂距很小,可以忽略不计,所以得到如下图的泊车轨迹。
整个过程应该满足以下条件: -
点2在起始点1后边,即X_2 < X_1;
-
点P2在目标终点上边,即Y_P2 > Y_Target_Point;
-
G点不碰左边界;
-
H点不碰库边;
-
车辆不碰C点;
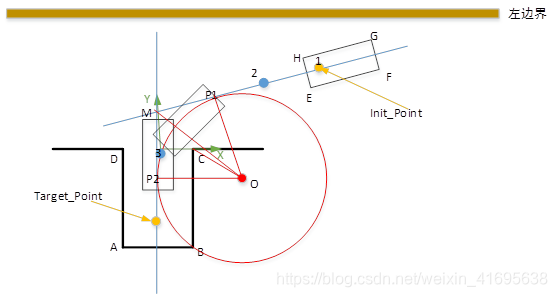
图2 一次入库示意图
下面对整个过程关键点计算方法进行详细介绍。
2.1.1 关键点计算
论证(1)(2)条件是否满足,要求出两个切点P1,P2的坐标。已知直线L1: a_1 x+b_1 y+c_1=0;直线L2: x=0,可以求出交点M坐标为:
M(0,-c_1/b_1),其中a_1=tan(yaw_init ),b_1=-1,c_1=y_init-x_inittan(yaw_init)
即:
M (0, y_init-x_inittan(yaw_init))
又∠P_1 MP_2 = π/2+yaw_init,则有
∠OMP_2= ∠OMP_1= (π/2+yaw_init)/2
MP_1=MP_2=R_min cot(∠OMP_1)
OM=R_min/sin(∠OMP_1)
于是可以得到P_2的坐标为:
P_2 (0, M_y-MP_2)
P_1的坐标为:
P_1 (MP_1cos(yaw_init), MP_1sin(yaw_init))
圆心O的坐标为:
O (R_min, P_2_y)
根据回旋曲线理论可知,线段P_1-2,圆弧〖3-P〗_2的距离为S/2,S = Kφ。
φ为最小半径对应的方向盘转角,因此,可以得到点2的坐标为:
2 (P_1_x+S/2cos(yaw_init), P_1_y+S/2*sin(yaw_init))
点3的坐标可以理解为点P_2绕圆心O旋转了S/2/R_min角度得到的新坐标,可以方便求出其坐标如下:
3_x = O_x + (P_2_x- O_x) *cos(S/2/R_min) -(P_2_y- O_y) *sin(S/2/R_min)
3_y = O_y + (P_2_x- O_x) *sin(S/2/R_min) + (P_2_y- O_y) *cos(S/2/R_min)
3_yaw = π/2 - S/2/R_min
3.1.2 碰撞干涉检查 -
G点不碰左边界
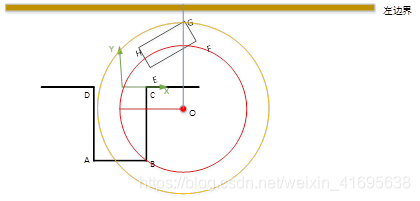
如图,G点不碰左边界的条件是:
R_G+Margin<y_init-O_y -
H点不碰库边
如图,H点不碰左库边的条件是:R_H+Margin<O_x+W/2 -
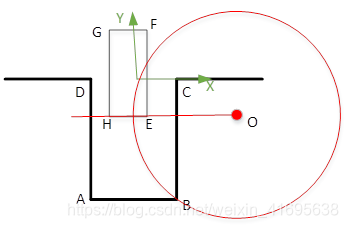
车辆不碰C点
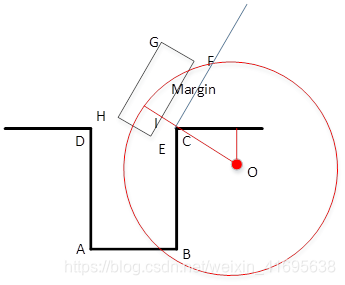
在整个泊车过程中,车辆后轴中心是距离库点C最近的点,为了避免车辆碰撞C点,要满足后轴中心的右边界点I不碰C点:

3.2 三段式进库计算方法
当车辆不满足一次入库的条件时,车辆需要在进入库内后至少再前后移动一次,才能倒库成功。
。。。
请关注微信公众号:自动驾驶原来如此,了解更多技术干货。扫码关注:

垂直泊车轨迹规划
最新推荐文章于 2025-04-13 17:17:08 发布


















 1228
1228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









