







 本文探讨了泊车过程中车辆起始位置的计算方法,基于目标车位和道路边界约束,通过圆弧和直线组合路径来确定可行的泊车起始区域。通过建立路径约束方程并利用MATLAB的优化函数求解,得出满足安全要求的起始点集合,形成起始区域。考虑到路径曲率变化和实际驾驶操作,文章指出不同泊车路径将影响起始区域,并强调选择合适的泊车路径的重要性。
本文探讨了泊车过程中车辆起始位置的计算方法,基于目标车位和道路边界约束,通过圆弧和直线组合路径来确定可行的泊车起始区域。通过建立路径约束方程并利用MATLAB的优化函数求解,得出满足安全要求的起始点集合,形成起始区域。考虑到路径曲率变化和实际驾驶操作,文章指出不同泊车路径将影响起始区域,并强调选择合适的泊车路径的重要性。
4、理论可行泊车起始区域
当车辆检测到目标车位后,为了保证泊车成功,车辆必须停留在合适的起始位置,即需要先控制车辆行驶至合适的位置,然后再控制车辆倒车入位,因此,需要先计算出满足泊车条件的起始区域。针对一个目标车位,考虑车位边界和道路边界约束条件,对应着一个唯一的可行泊车起始区域。以泊车结束时车辆所处位置为参考,若存在一系列的点,通过一定曲线连接该点与泊车终止点,并且该路径曲线满足安全要求,则该点可称为可行泊车起始点,一系列起始点构成的区域就是可行泊车起始区域。
以传统的圆弧和直线的组合曲线连接车辆起始点和路径终止点,根据车位尺寸、车辆最小转弯半径限制和道路边界约束,可以计算出满足要求的起始区域。
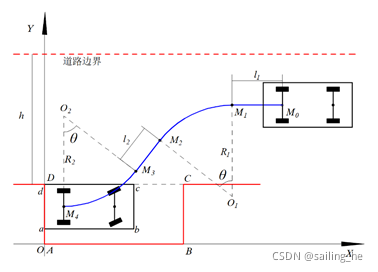
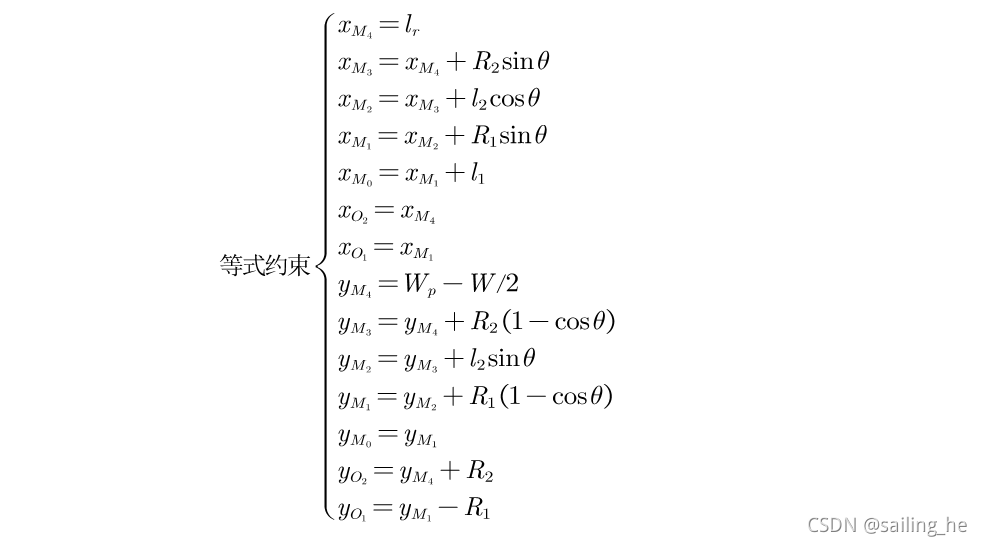
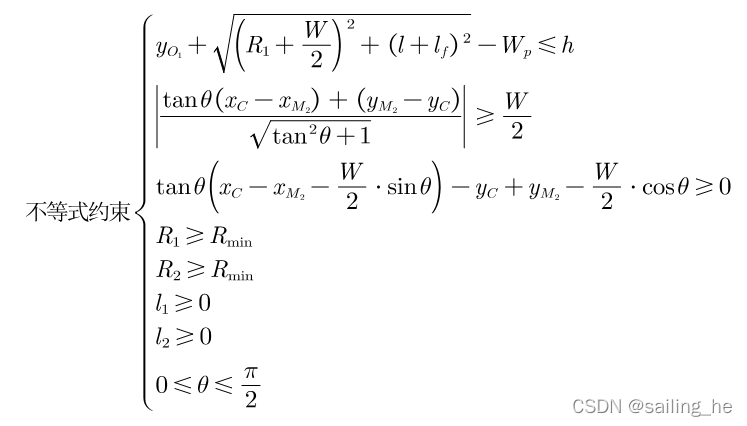
由图中的几何关系可知:
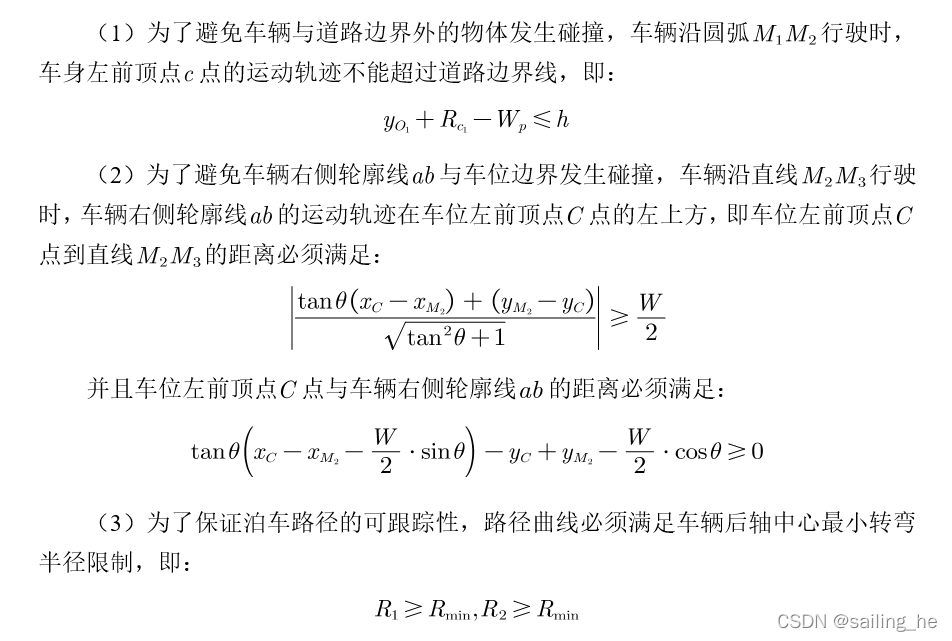
为了避免车辆与周围障碍物发生碰撞,需满足以下条件:
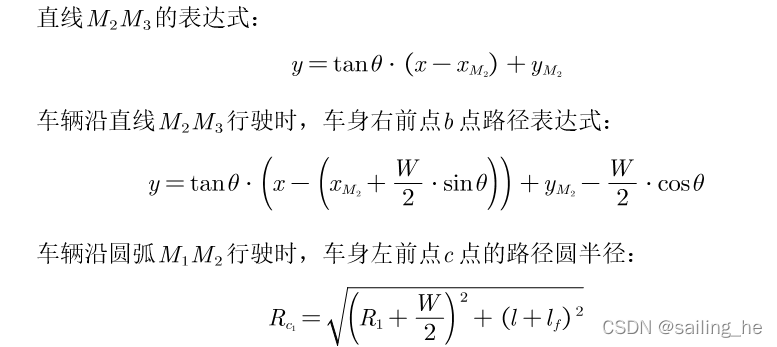
根据上图中的几何关系和前文中的约束关系,建立圆弧和直线组合路径函数的等式和不等式约束方程:
针对上面的不等式方程,带入相应的参数之后,可在MATLAB中使用fmincon约束优化问题求解函数进行求解。 MATLAB代码链接
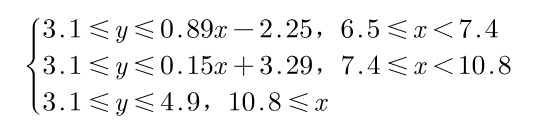
最后运行结果如下图所示:

可行泊车起始区域可近似表示为:
由于上文是基于车辆的最小转弯半径计算求出可行泊车起始区域,是没考虑泊车路径曲线曲率存在突变情况的理想区域,路径不易跟踪,而且车辆按照最小转弯半径行驶到路径终止点时,前轮转角处于最大转角位置,需要停车原地转向,当泊车路径曲线发生改变时,对应的起始区域也将发生改变,因此需要确定采用何种泊车路径。


















 8039
8039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











