







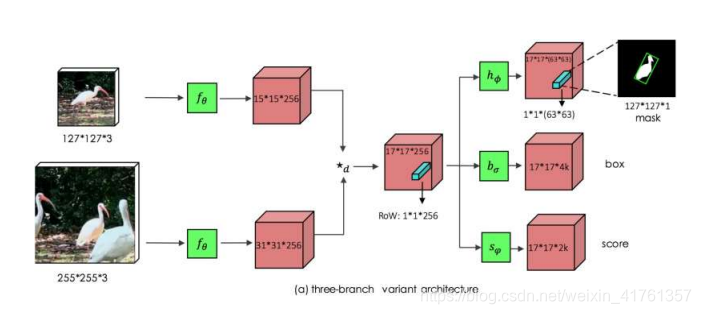
一、Siam-RCNN
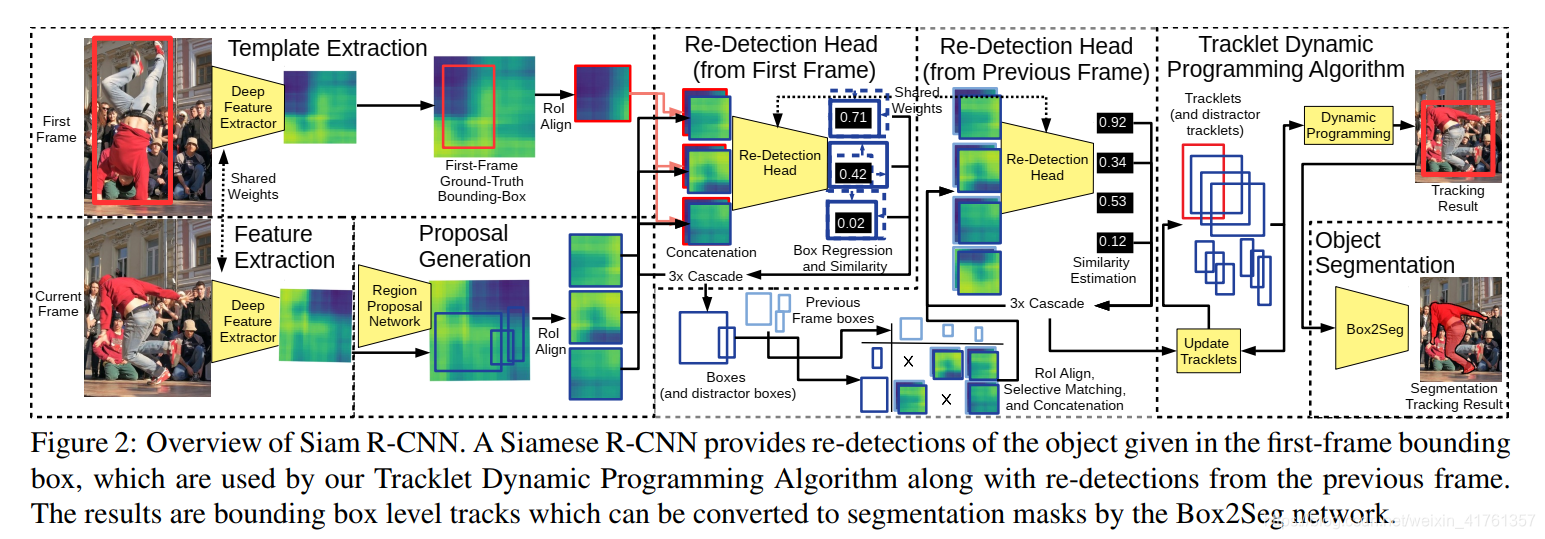
使用孪生网络作为重新预测器,之前的检测器均采用单级检测器结构,对于单目标的检测任务,两级检测网络更好。其中第二阶段主要将感兴趣的ROI与模版区域进行比较,将感兴趣的区域特征连接起来,与参考图像进行对比,实现了对物体大小和长宽比变化的鲁棒性,这一点,使用简单的互相关操作是很难实现的。
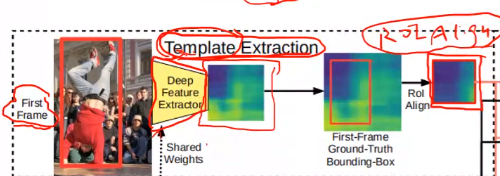
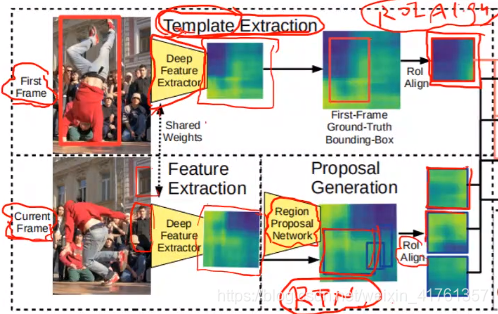
1、模板抽取 template extraction
第一帧框定目标,用训练好的CNN提取特征得到FM,按照pooling比例得到框出目标在FM上的对应FM,再经过ROI Align进行尺寸处理
2.特征提取 feature extraction && 候选区域生成proposal generation
对于未来的帧,命其为current frame也就是当前帧,用同样的特征提取网络(模板提取网络共享权重)提取特征,再经过RPN进行候选提取
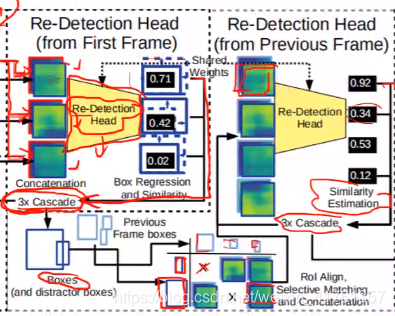
3.re-detection head
得到更精细的Bbox,结合了第一帧和过往帧
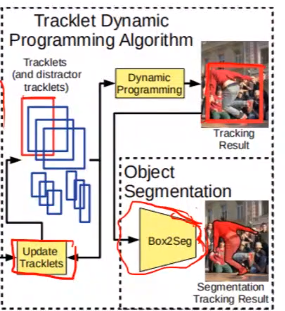
4.track
在这里还用到分割
5.总结
基于检测;
用相同的特征提取网络,这也是名称中siam的由来;
运用roi-alingn。
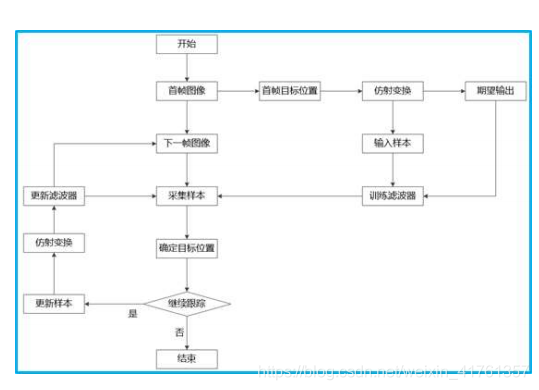
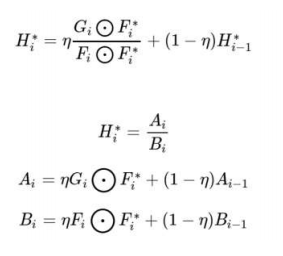
二、MOSSE
核心思想是最小化方差滤波。传送门
三、SiamFC
权值共享,计算响应比。传送门

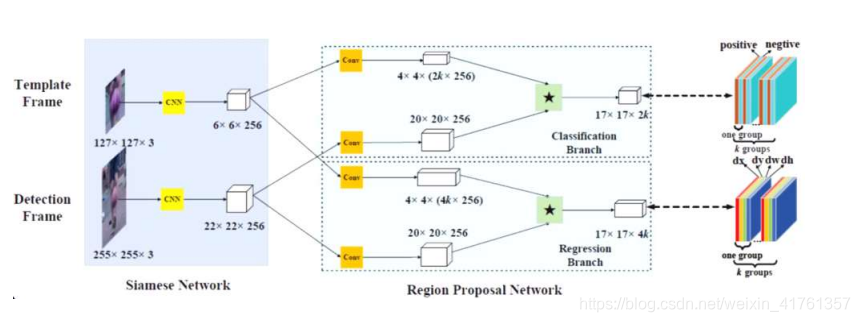
四、SiamRPN
引进RPN网络机制。传送门
五、SiamMask
引入分割。传送门
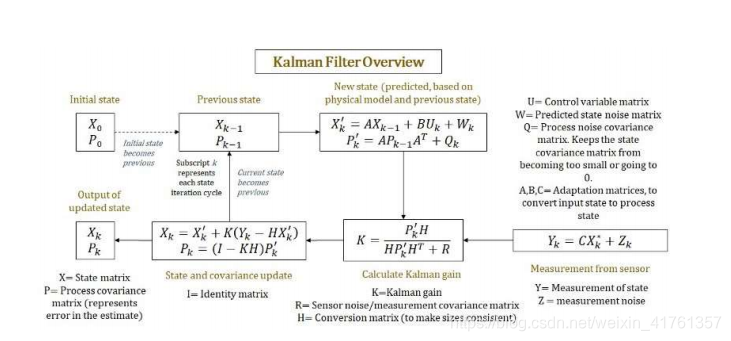
六、Kalman filter
是一种用于状态估计的算法。前提是满足线性系统和高斯噪声这两个条件,如果满足就可以用卡尔曼滤波进行估计,如果不满足就需要用粒子滤波进行估计。 传送门
所谓线性系统:一个输入x,一个输入y,经过线性变换可以分别输出u,v,而如果输入x+y,就能对应的输出u+v

对于计算和测量得到的位置有一个偏差,而这个偏差应满足高斯分布。
模拟小车运动:
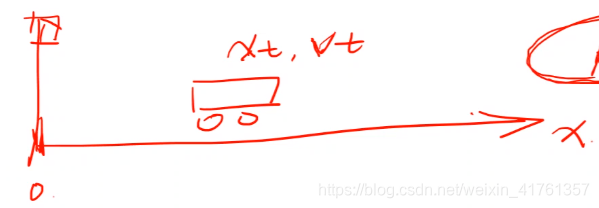
有:
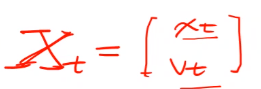
状态转移方程如下:

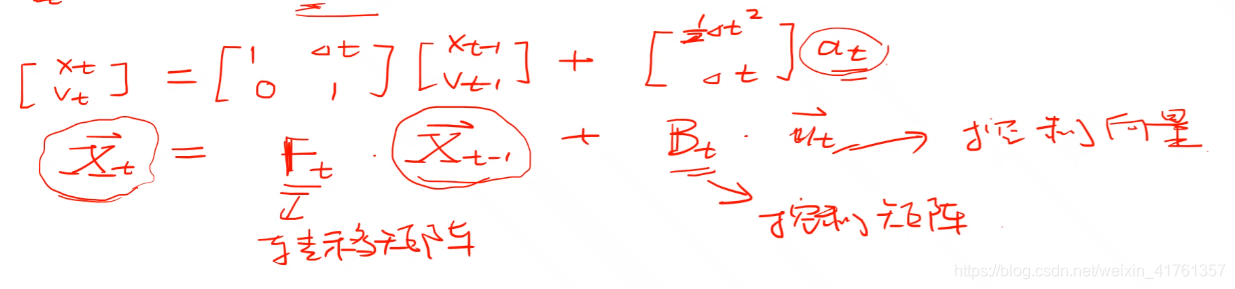
其中,上一时刻Xt 预测有一定的偏差:设为Pt
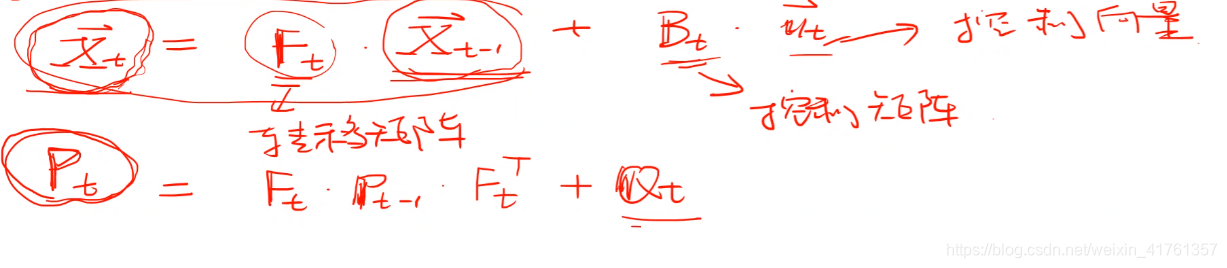
Qt代表噪声的方差。

对于实际值:另其为Zt

其中:
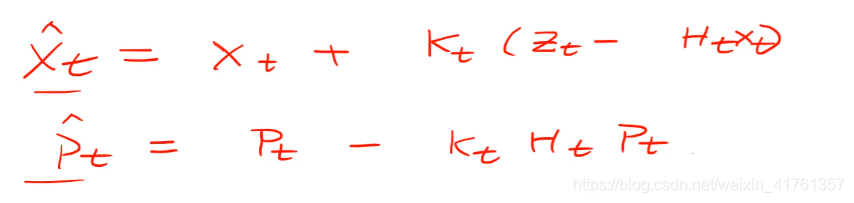
最终估计值:

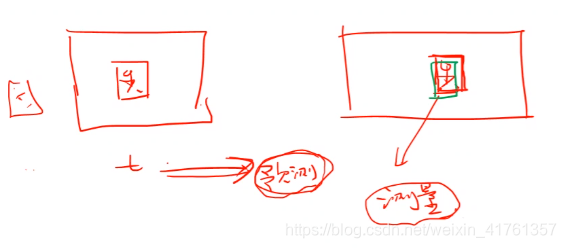
对于跟踪中的卡尔曼滤波:
在t时刻有一个预测结果,t+1时刻有一个测量结果,通过卡尔曼滤波将预测值和测量值进行计算。















 3535
3535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









