









 本文档详细介绍了如何在RT-Thread操作系统中配置和使用UART DMA功能,特别是针对UART6和UART2的设置。通过RT-Thread Studio,设置UART6的DMA接收并进行测试,确保数据正确传输。当使用UART2时,需要注意短接SB62和SB63以启用Arduino和Morpho接口。同时,展示了如何实现错位输出并将其打印到控制台的代码示例。
本文档详细介绍了如何在RT-Thread操作系统中配置和使用UART DMA功能,特别是针对UART6和UART2的设置。通过RT-Thread Studio,设置UART6的DMA接收并进行测试,确保数据正确传输。当使用UART2时,需要注意短接SB62和SB63以启用Arduino和Morpho接口。同时,展示了如何实现错位输出并将其打印到控制台的代码示例。
1.经过验证过的引脚,排列如下:
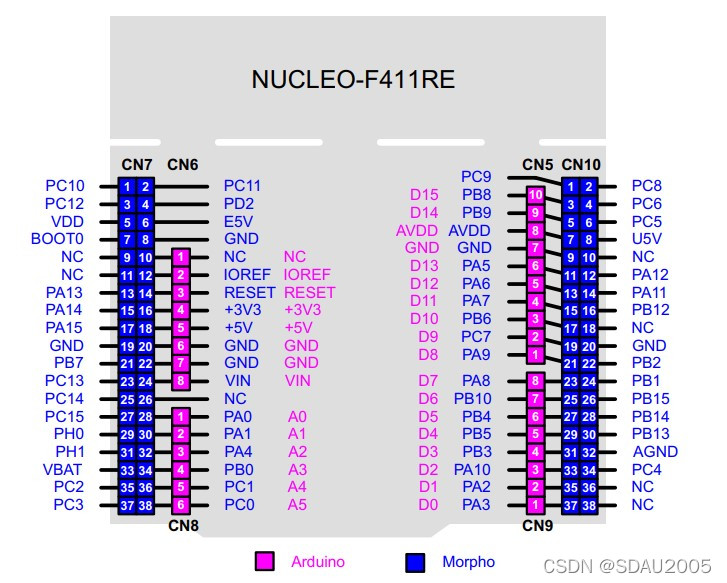
补充引脚信息:
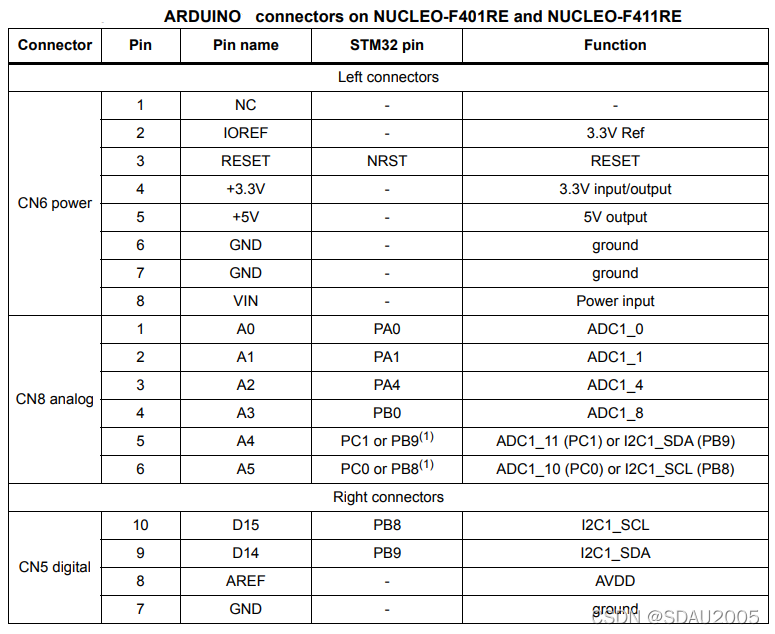
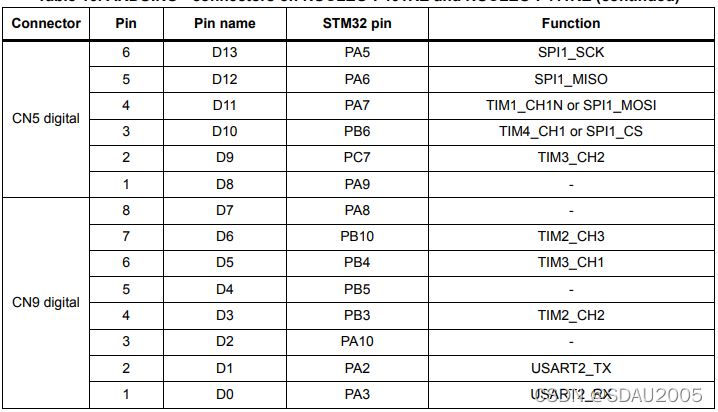
2.有两个UART获得IDE支持(例如RT-Thread),即:
UART6( TX:PA11,RX:PA12)
UART2(TX:PA2,RX:PA3)
但特别要说明的是,默认情况下UART2的Arduino和Morpho接口是不通的,即上图CN9的D1(PA2)/D0(PA3)失去功能。若要使之正常工作,需要短接SB62和SB63(开发板背面)。默认情况下UART2是连接USB接口的(CN1),而CN3的TX、RX亦正常。
3.UART6的DMA测试,RT-Thread Studio的“组件“和”硬件”,按照下图设置使能DMA:


3.参考RT-Thread官网文档中心UART设备的“DMA接收及轮询发送”:
UART设备 (rt-thread.org) https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/uart/uart_v1/uart将uart3改为uart6,另需一USB-TTL接入PA11/PA12,测试截图如下:
https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/uart/uart_v1/uart将uart3改为uart6,另需一USB-TTL接入PA11/PA12,测试截图如下:
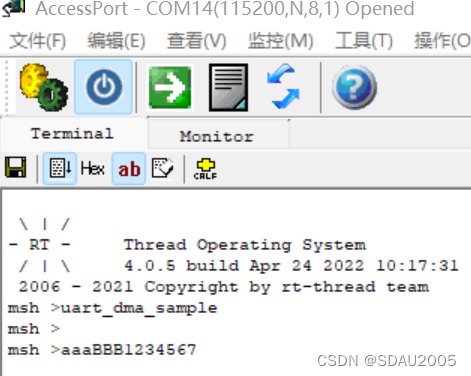
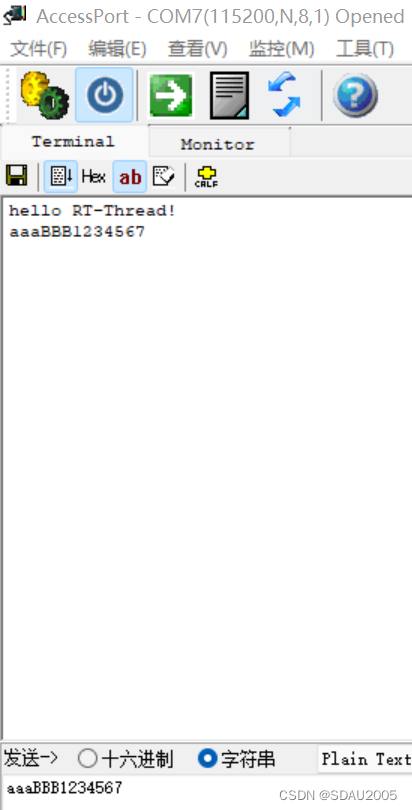
表明自UART6输入字符,除本端口显示外,在UART2也打印出来了。 由于设定RT_SERIAL_RB_BUFSZ为64,若一次性输入字符超过此数,会出现“message queue full!”错误。
4.若需错位输出,并且结果打印到控制台,需将字符串rx_buffer的每一个字符进行+1处理,全部代码如下:
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#define SAMPLE_UART_NAME "uart6" /* 串口设备名称 */
int main(void)
{
}
/* 串口接收消息结构*/
struct rx_msg
{
rt_device_t dev;
rt_size_t size;
};
/* 串口设备句柄 */
static rt_device_t serial;
/* 消息队列控制块 */
static struct rt_messagequeue rx_mq;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
struct rx_msg msg;
rt_err_t result;
msg.dev = dev;
msg.size = size;
result = rt_mq_send(&rx_mq, &msg, sizeof(msg));
if ( result == -RT_EFULL)
{
/* 消息队列满 */
rt_kprintf("message queue full!\n");
}
return result;
}
static void serial_thread_entry(void *parameter)
{
struct rx_msg msg;
rt_err_t result;
rt_uint32_t rx_length;
static char rx_buffer [RT_SERIAL_RB_BUFSZ + 1];
while (1)
{ char data[64]="";
static rt_uint8_t i=0;
rt_memset(&msg, 0, sizeof(msg));
/* 从消息队列中读取消息*/
result = rt_mq_recv(&rx_mq, &msg, sizeof(msg), RT_WAITING_FOREVER);
if (result == RT_EOK)
{
/* 从串口读取数据*/
rx_length = rt_device_read(msg.dev, 0, rx_buffer, msg.size);
rx_buffer[rx_length] = '\0';
/* 通过串口设备 serial 输出读取到的消息 */
rt_device_write(serial, 0, rx_buffer, rx_length);
/* 错位输出,打印到控制台 */
for(i=0; i<rx_length; i++)
data[i]=rx_buffer[i]+1;
rt_kprintf("%s",data);
}
}
}
static int uart_dma_sample(int argc, char *argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
static char msg_pool[256];
char str[] = "hello RT-Thread!\r\n";
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/* 查找串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化消息队列 */
rt_mq_init(&rx_mq, "rx_mq",
msg_pool, /* 存放消息的缓冲区 */
sizeof(struct rx_msg), /* 一条消息的最大长度 */
sizeof(msg_pool), /* 存放消息的缓冲区大小 */
RT_IPC_FLAG_FIFO); /* 如果有多个线程等待,按照先来先得到的方法分配消息 */
/* 以 DMA 接收及轮询发送方式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_DMA_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(uart_dma_sample, uart device dma sample);


















 3643
3643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











