







一、几何约束v.s.微分约束
这两种约束的核心区别在于几何约束(geometric constraint)仅仅是对物体的位置坐标进行了约束,而微分约束则引入了速度维度,约束方程中包含了位置对时间的导数的项。所以我们看到一个约束方程中包含速度项 x ˙ \dot{x} x˙,那么这个约束就升级为了微分约束(differential constraint)。
二、可积分约束v.s.不可积分约束
对于微分约束,如果满足可积性条件,能够表示成等价的积分形式,则称为可积约束(Integrable constraint),可积约束可以通过以下几种情况来进行判定:
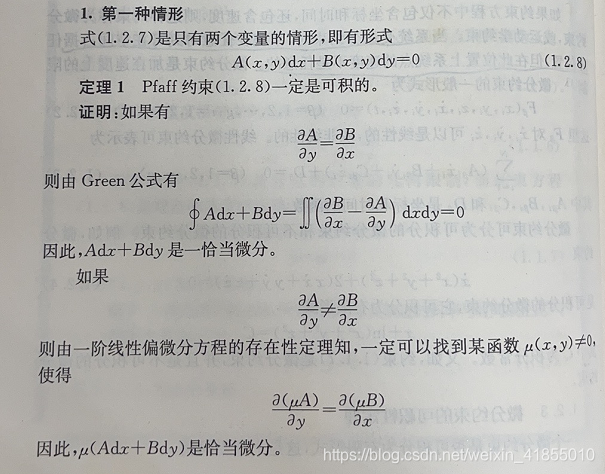
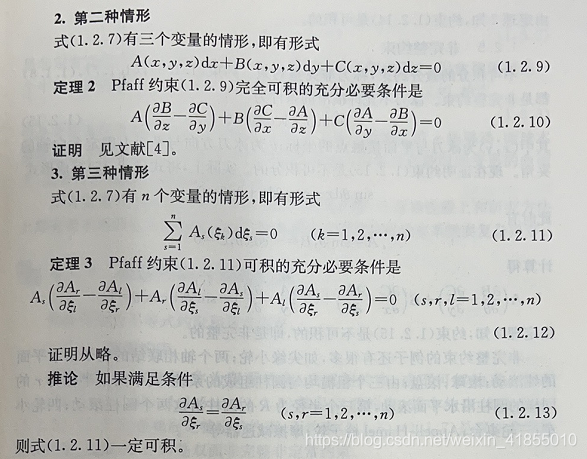
不满足以上条件的,就成为不可积分约束(Non-integrable constraint)。
三、完整约束v.s.非完整约束
根据以上两种分类,我们再做一个聚类,把几何约束和可积分的微分约束归为一大类,叫做完整约束(holonomic constraint);对于不可积分的微分约束,成为不完整约束(nonholonomic constraint)。
四、定常约束v.s.非定常约束
如果时间t不明显地出现在约束方程中,则称其为定常约束(scleronomic constraint),或者叫做稳定约束,否则则称为是非定常约束(rheonomic constraint),或者说这是一个时变的约束哈哈哈。所以定常和非定常的关键在于是否为时间的函数。
五、单面约束v.s.双面约束
如果约束方程是等式约束,表示位置只能出现在约束方程确定的曲线、平面或者空间中,就像是夹在两个平面之间,所以叫做双面约束(Double constraints)。否则,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5241
5241

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









