







16.1 任务与奖赏
我们考虑如何种西瓜,经过浇水除草施肥,经过一段时间后才能收获西瓜,通常要收获后,我们才知道种出的瓜好不好,在种瓜过程中我们执行某个操作(如施肥)时,并不能立即获得最终奖赏(好瓜),仅能得到一个当前反馈(瓜苗更加健壮),我们需要多次种瓜,在种瓜过程中不断摸索,才能总结出较好的种瓜策略,这个过程抽象出来,就是“强化学习”
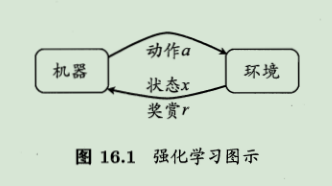
强化学习任务通常用马尔可夫决策过程来描述:机器处于环境E中,状态空间为X,其中每个状态(x属于X)是机器感知到的环境的描述,如在种瓜任务上就是对当前瓜苗长势的描述。机器能采取的动作构成了动作空间A,如种瓜过程中有浇水、施肥、使用不同的农药等多种可供选择的动作;若某个动作a作用在当前状态x上,则潜在的转移函数P将使得环境从当前状态按某种概率转移到另一个状态,如瓜苗状态为缺水,若选择动作浇水,则瓜苗长势会发生变化…不想写了。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









