






PID
一、PID是什么?
1.开环和闭环



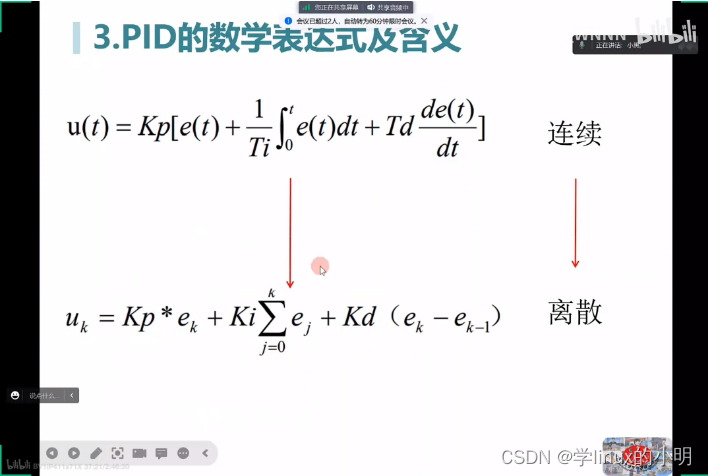
二、PID的数学表达式和含义
1.从连续到离散的转换
2.P算法含义和作用讲解(比例项)

3.D算法含义和作用讲解(微分项)
“阻尼”系统响应速度越快,抑制越明显(小车摆动越明显,抑制越明显),响应越慢,抑制越微弱

4.I算法含义和作用讲解(积分项)
消除稳态误差
有时候加入i算法系统,会不太稳定。所以没有特别需要的话,pd就可以控制了

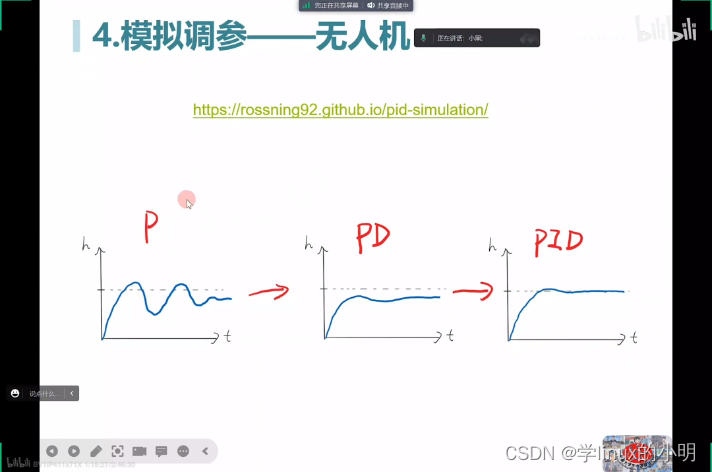
三、模拟调参 --无人机
1.从模拟调参中理解P、I和D的含义和作用
PID曲线图
四、实际使用中PID的各类组合
1.只有一个环情况
比如直立环

2.多个环情况

五、平衡小车PID
1.代码讲解

2.三个容易踩的坑
1.时间间隔要短
2.时间间隔要一样
3.Pid读取角度和计算要放在一起
七、调参流程和方法讲解
1.先调直立环(PD)
-
先调极性->Kp ;(前提:先将D,以及后面的速度环置0)
-
设定一个p值,观察平衡小车,摆动(一般是摆动3.4下后,就倒了)
-
改变P值,直到小车大幅度低频振荡(相比于D),再增加P值,小车大幅度振荡频率也很难改变,停止增加p值
-
当振荡处于中等偏上时候,取此刻P值
-
然后加入D ,发现小车振荡减小,直到小幅度高频振荡(别以为这个时候就结束了)
-
保险起见,继续加,发现小车没什么变换,取D
-
观察抽搐2秒,赶紧关电机,否则容易烧驱动芯片
2.再调速度环(PI)
-
经验:将第一步的Kp和Kd同时乘以0.6,因为速度环是给直立环+Buff的,否则抽搐更快
-
同第一步,先调极性,完事后,可以左右摆渡,轮子会动
-
继续加大参数,小车会平衡,结束
3.最后转向环(PD)
纯P控制,P从0往上加,直到效果满意为止
八、调参流程2

















 3423
3423











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









