




简介:ROS系统为机器人硬件抽象、软件通信、进程管理等提供统一框架。本资料包将指导如何在ROS环境下进行嵌入式系统的前后端开发,涵盖ROS基础、嵌入式系统原理、ROS与嵌入式结合策略、前端可视化界面实现、后端数据处理和控制算法。同时,以北京航空航天大学2019年嵌入式软件项目为例,提供代码示例、实验指导和项目报告,帮助学习者深入理解ROS环境下的嵌入式开发。
1. ROS系统基础
ROS(Robot Operating System)是一个灵活的框架,为机器人软件开发提供了一套工具和库函数,广泛应用于学术和工业界。它不仅仅是一个操作系统,而是一个元操作系统,为机器人应用程序开发提供了各种构建模块。
ROS的起源和目的
ROS最初由斯坦福人工智能实验室(SAIL)和斯坦福大学的生物机器人实验室联合开发,以满足复杂机器人系统软件开发的需求。它的主要目的是简化和加速复杂机器人的软件开发过程,使得开发者可以重用现有的代码,专注于特定问题的创新。
ROS的体系结构和关键组件
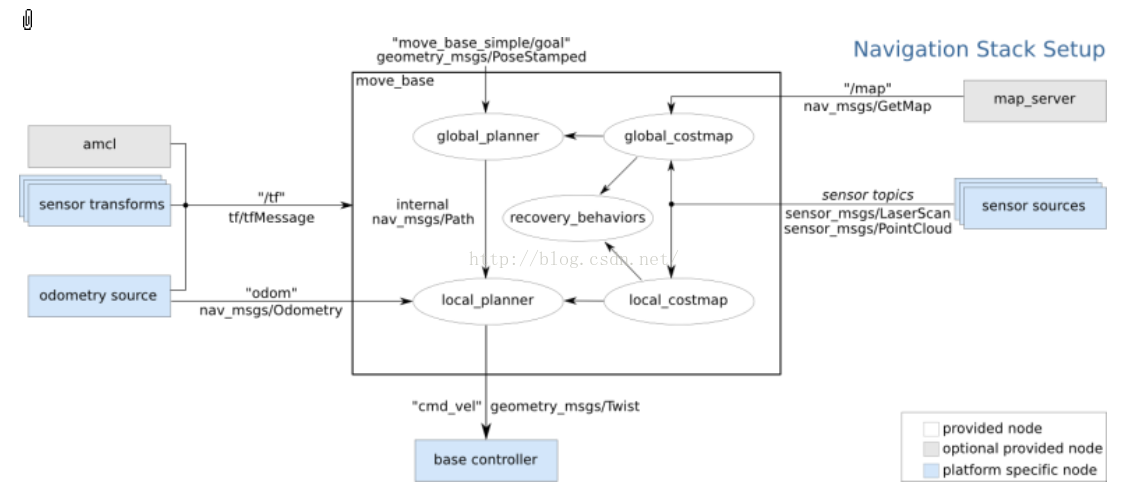
ROS的体系结构由几个核心组件组成,包括节点(node)、主题(topic)、服务(service)、消息(message)和包(package)等。节点是ROS中的一个基本执行单元,可以实现特定的功能,例如传感器数据的读取。主题是一个节点间通信的通道,节点可以通过发布(发布者)和订阅(订阅者)消息的方式进行数据交互。服务是一种节点间同步通信的方式,客户端请求服务,服务器端响应请求。消息是数据的载体,通常包含了节点间传递的数据类型和内容。最后,包是ROS软件的构建和部署单元,包含所有的源代码、数据文件、配置文件等。
通过这些组件,ROS不仅为开发人员提供了一个灵活的编程环境,还允许开发者通过网络共享和重用代码。这使得ROS成为了机器人开发者社区内最受欢迎和广泛使用的工具之一。
2. 嵌入式开发概述
2.1 嵌入式系统的基本概念
2.1.1 嵌入式系统定义
嵌入式系统是由硬件和软件集成而成的,专门设计用于控制、监视或辅助机械和设备的计算机系统。它不同于通用计算机系统,是为特定应用设计的,通常具有有限的计算资源、存储能力和功耗要求。嵌入式系统的核心是微控制器(MCU)或微处理器(MPU),它们被编程以执行特定的、有限的任务集。
2.1.2 嵌入式系统的特点和发展
嵌入式系统具有以下特点:
- 实时性:必须在确定的时间内响应外部事件或完成任务。
- 高可靠性:系统运行必须稳定可靠,确保安全。
- 专用性:为特定应用设计,优化的硬件和软件。
- 小体积、低功耗:满足便携性和电池供电的需求。
- 易于集成和扩展:便于与其他系统组件交互和升级。
随着物联网(IoT)、人工智能(AI)和机器人技术的发展,嵌入式系统正变得更加智能、互联和复杂。它们越来越多地集成了高级通信接口、传感器数据处理和机器学习算法。
2.2 嵌入式系统开发流程
2.2.1 需求分析与系统设计
在开发嵌入式系统之前,需求分析至关重要。开发团队需要明确系统的功能需求、性能要求、用户界面要求以及与其他系统的接口。系统设计阶段会将这些需求转化为详细的系统架构,包括选择合适的处理器、内存大小、存储解决方案、输入/输出接口以及嵌入式操作系统的选择。
2.2.2 硬件选择与软件开发
硬件的选择是基于性能、成本、尺寸、功耗、可靠性和开发时间的综合考虑。选择正确的硬件后,软件开发工作将开始。这包括为嵌入式操作系统编写驱动程序、中间件、应用程序以及固件。软件开发通常需要在仿真器或开发板上进行,并使用版本控制系统来跟踪代码变更。
2.2.3 系统测试与部署
系统测试是确保嵌入式软件质量的关键步骤,包括单元测试、集成测试、系统测试和验收测试。测试工作可以使用模拟环境或实际硬件平台来完成。完成测试并验证功能后,系统可以部署到目标环境。在部署阶段,还需要考虑后期的维护和更新计划。
代码块、流程图、表格等元素的展示以及具体操作步骤将在后续章节中结合实际案例详细讨论。这样的内容安排有助于读者更好地理解嵌入式开发的各个阶段,并能够在实际工作中应用所学知识。
3. ROS与嵌入式硬件集成
在现代的机器人开发中,ROS(Robot Operating System)系统与嵌入式硬件的集成是技术进步的核心。通过将ROS强大的软件生态与嵌入式硬件的多样性和灵活性相结合,可以实现高度复杂和功能丰富的机器人应用程序。本章将详细介绍如何将ROS系统与嵌入式硬件集成,以及相关的部署和通信机制。
3.1 ROS系统与嵌入式硬件的结合
3.1.1 ROS系统的架构与优势
ROS系统提供了一个灵活的框架,用于构建机器人应用程序。其模块化的架构允许开发者在不同的层面上构建和重用代码,包括硬件抽象、底层设备控制、常用功能的实现、消息传递以及包管理。这种模块化的设计使得ROS在研究和教育领域极为流行,并且在工业应用中也越来越受到重视。
ROS系统的架构优势主要体现在以下几个方面:
- 模块化 : ROS的程序被称为节点,这些节点可以分布在多个机器上,实现分布式计算。
- 消息传递 : ROS中的节点通过话题(topics)、服务(services)、动作(actions)等机制进行通信。
- 工具丰富 : ROS提供了多种工具和库,用于数据可视化、数据记录、模拟以及性能分析等。
- 社区支持 : ROS拥有活跃的开发者社区和大量的开源资源。
3.1.2 嵌入式硬件的选择标准
为了与ROS系统成功集成,嵌入式硬件的选择至关重要。根据不同的项目需求和应用场景,硬件的选择标准有所不同,但以下几个因素通常是最重要的:
- 计算能力 : 确保硬件有足够的处理能力来运行ROS节点以及处理来自传感器的数据。
- 内存大小 : 足够的RAM以存储ROS运行时的数据和中间文件。
- 通信接口 : 支持USB、串口、以太网或无线通信的硬件对于连接各种传感器和执行器至关重要。
- 电源要求 : 嵌入式硬件应有合理的电源效率和电源管理功能,以适应长时间运行的需求。
- 可扩展性 : 硬件应支持一定程度的扩展性,如添加额外的传感器、执行器等。
3.2 ROS在嵌入式设备上的部署
3.2.1 ROS在嵌入式设备上的安装
在嵌入式设备上安装ROS涉及到选择合适的ROS版本和依赖包,以及配置相应的操作系统和开发工具链。具体步骤通常包括:
- 选择操作系统 : ROS官方推荐使用Ubuntu,嵌入式设备上通常使用如Ubuntu Mate for Raspberry Pi等版本。
- 安装ROS : 使用
rosdep和apt-get等工具安装ROS核心包和所需依赖。 - 配置环境变量 : 设置
ROS_PACKAGE_PATH和ROS_MASTER_URI等环境变量,确保ROS节点可以正确查找和通信。
例如,对于树莓派,安装ROS Kinetic的指令可能如下:
# 安装ROS Kinetic预览版(对于常规安装请访问ROS官网获取最新指令)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install python-rosinstall
3.2.2 ROS与嵌入式硬件的通信方式
嵌入式设备与ROS之间的通信是机器人开发的关键。常见的方式包括:
- 话题发布和订阅 : 传感器数据可以通过话题的方式发布,而控制器节点则订阅这些话题,根据数据做出决策。
- 服务调用 : 通过定义服务,节点之间可以进行请求-响应通信,适合执行特定任务。
- 参数服务器 : 参数服务器可以用来存储和获取配置信息,适用于多个节点需要共享的参数。
下面是一个简单的ROS节点通过话题发布数据的例子:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def talker():
# 初始化节点
rospy.init_node('talker', anonymous=True)
# 创建发布者,话题名为 'chatter', 消息类型为String
pub = rospy.Publisher('chatter', String, queue_size=10)
# 设置循环的频率
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
# 打印消息到控制台
rospy.loginfo(hello_str)
# 发布消息
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
这个例子展示了如何创建一个发布者节点,并每秒向 chatter 话题发布10条消息。
以上章节详细介绍了ROS系统与嵌入式硬件结合的背景知识、安装步骤和通信机制。接下来的章节将继续深入探讨前端开发技术、后端数据处理以及如何通过交叉编译和编译工具链配置来优化ROS与嵌入式设备的集成。
4. 前端开发技术与工具
4.1 前端开发技术概览
4.1.1 前端技术的组成和作用
前端技术主要包含HTML、CSS和JavaScript,这些是构成网页内容、样式和行为的基础。HTML(HyperText Markup Language)定义了网页的结构和内容,CSS(Cascading Style Sheets)负责网页的样式与布局,而JavaScript则是实现网页功能和交互动效的核心。
HTML
HTML通过标签元素描述网页结构,提供了一个标准的文档对象模型(DOM),使得浏览器能够解析并展示网页。随着HTML5的出现,它不仅丰富了网页的表现形式,还支持更复杂的应用,如视频播放、绘图、地理定位等功能。
CSS
CSS负责网页的视觉设计和布局,它描述了网页元素的外观,包括颜色、字体、布局等。CSS3引入的动画、变形和过渡效果,极大地提高了网页的用户体验。随着响应式设计的普及,CSS在适配不同设备显示方面扮演着关键角色。
JavaScript
JavaScript是实现网页动态效果和与用户进行交互的编程语言。它可以直接操纵DOM,使得页面元素可以根据用户行为或数据变化进行实时更新。现代JavaScript框架如React、Angular和Vue.js进一步提升了前端开发的效率和性能。
前端技术不仅使得网页能够在多种设备上展示内容,还通过交互性来提升用户体验。通过前端技术,开发者能够创建具有高度互动性和响应式的用户界面,从而吸引和保持用户的注意力。
4.1.2 前端开发工具的使用
前端开发人员通常需要使用多种工具来提高开发效率,保证代码质量和维护性。以下是一些常见的前端开发工具:
编辑器和IDE
- Visual Studio Code:现代、轻量级且功能强大的代码编辑器,拥有庞大的插件生态系统。
- Sublime Text:快速且具有高度可定制性的代码编辑器。
- JetBrains WebStorm:专为前端开发设计的集成开发环境(IDE),集成了多种前端开发工具。
版本控制工具
- Git:目前最流行的版本控制工具,用于代码的版本管理和团队协作。
依赖管理工具
- npm(Node Package Manager):基于Node.js的包管理和分发工具,用于管理前端项目的依赖包。
- Yarn:一个快速、可靠且安全的依赖管理工具,与npm兼容,提供了一些额外的特性。
构建工具和模块打包器
- Webpack:模块打包工具,用于现代前端应用程序中,优化资源打包。
- Gulp:自动化构建工具,可以帮助自动化重复性的开发任务,比如压缩、编译、单元测试等。
调试工具
- 浏览器内置开发者工具:Chrome DevTools、Firefox Developer Tools等,用于网页调试和性能分析。
性能优化工具
- Lighthouse:由Google开发的自动化工具,用于提高网页性能和质量。
- Google PageSpeed Insights:分析网页性能并提供优化建议的在线工具。
这些工具的运用,大大提升了前端开发的效率,缩短了产品的上市时间,并确保了高质量的代码产出。通过这些工具,开发者能够更好地组织项目结构,优化开发工作流,保证代码的可读性和可维护性。
4.2 前端开发实践操作
4.2.1 用户界面设计原则
用户界面(UI)设计是前端开发中的重要环节,需要遵循一系列设计原则,以确保创建出直观、易用和吸引人的用户界面。以下是一些基本的设计原则:
一致性
界面元素(如按钮、字体、颜色等)应该在整个应用中保持一致,以减少用户的学习成本。
反馈
用户的所有操作都应得到及时和明确的反馈。例如,按钮在被点击时应该有视觉变化,操作错误应提供相应的提示信息。
简洁性
界面不应过于复杂,应避免信息过载。关键信息和操作应该突出显示,并且布局要清晰有序。
可用性
用户界面应该直观易用,即使是没有经验的用户也能轻松上手。
适应性
界面需要能够适应不同的屏幕尺寸和分辨率,确保在各种设备上提供良好的用户体验。
为了实现这些原则,前端开发人员通常需要与UI/UX设计师紧密合作,将设计原型转化为实际的代码实现。开发者不仅要编写能够实现设计效果的代码,还要确保这些代码具备良好的性能和兼容性。
4.2.2 前端框架与库的运用
随着现代Web应用复杂性的增加,前端框架和库逐渐成为开发中不可或缺的部分。框架和库提供了一系列预定义的组件和模式,帮助开发者更快地构建高质量的应用程序。以下是目前前端领域中几个最流行的框架和库:
React
React是由Facebook开发的用于构建用户界面的JavaScript库。它采用了虚拟DOM技术,只在必要时更新真实DOM,从而提高性能。React组件化的设计思想使得代码易于复用和维护。
Angular
Angular是一个由Google支持的前端框架。它使用TypeScript作为开发语言,提供了一套完整的解决方案,包括模板、数据绑定、依赖注入等。Angular框架具备强大的功能,适合构建复杂的单页应用(SPA)。
Vue.js
Vue.js是一个渐进式JavaScript框架,被设计为易于上手和集成。Vue的核心库只关注视图层,使得它在实现小型组件和功能时更为灵活。
前端模块打包器(Bundlers)
现代前端项目通常依赖于npm或yarn来管理项目依赖,并使用模块打包器如Webpack来组织和打包项目文件。打包器可以处理各种静态资源,如图片、字体和样式表,并优化输出的文件,以减少HTTP请求的数量和提升加载速度。
CSS预处理器
预处理器如Sass和Less提供了更加强大的CSS功能,比如变量、函数和混合(mixins),使得编写CSS更为高效和可维护。
4.2.3 前后端数据交互实现
前后端数据交互是现代Web应用的关键部分。前端通常通过AJAX(Asynchronous JavaScript and XML)技术与后端服务进行通信。以下是实现前后端数据交互的一些常用技术:
AJAX请求
利用XMLHttpRequest或Fetch API发起异步HTTP请求,并处理来自服务器的响应。Fetch API为网络请求提供了更强大和灵活的控制能力。
fetch('https://api.example.com/data')
.then(response => response.json())
.then(data => console.log(data))
.catch(error => console.error('Error:', error));
WebSockets
WebSockets提供了一个持久化的网络连接,允许服务器和客户端之间进行全双工通信。这种方式非常适合实时数据交换,如聊天应用或游戏。
RESTful API
REST(Representational State Transfer)是一种软件架构风格,它定义了如何构建网络应用。在RESTful架构中,服务器提供资源的表示,客户端通过HTTP方法(GET, POST, PUT, DELETE)进行操作。
GraphQL
GraphQL是一种查询语言,允许客户端精确地指定它们需要哪些数据。与REST不同,GraphQL不是一套架构风格,而是一种在API层面的解决方案。它能够减少数据传输,并允许客户端执行更复杂的查询。
在前后端数据交互实现时,开发者需要考虑安全性、性能和容错性等因素,确保数据交互过程中的数据完整性和用户隐私。通过选择合适的通信技术和协议,可以构建出响应快速、用户友好的Web应用。
4.1.1 前端技术的组成和作用
前端技术主要包含HTML、CSS和JavaScript,这些是构成网页内容、样式和行为的基础。HTML(HyperText Markup Language)定义了网页的结构和内容,CSS(Cascading Style Sheets)负责网页的样式与布局,而JavaScript则是实现网页功能和交互动效的核心。
HTML
HTML通过标签元素描述网页结构,提供了一个标准的文档对象模型(DOM),使得浏览器能够解析并展示网页。随着HTML5的出现,它不仅丰富了网页的表现形式,还支持更复杂的应用,如视频播放、绘图、地理定位等功能。
CSS
CSS负责网页的视觉设计和布局,它描述了网页元素的外观,包括颜色、字体、布局等。CSS3引入的动画、变形和过渡效果,极大地提高了网页的用户体验。随着响应式设计的普及,CSS在适配不同设备显示方面扮演着关键角色。
JavaScript
JavaScript是实现网页动态效果和与用户进行交互的编程语言。它可以直接操纵DOM,使得页面元素可以根据用户行为或数据变化进行实时更新。现代JavaScript框架如React、Angular和Vue.js进一步提升了前端开发的效率和性能。
前端技术不仅使得网页能够在多种设备上展示内容,还通过交互性来提升用户体验。通过前端技术,开发者能够创建具有高度互动性和响应式的用户界面,从而吸引和保持用户的注意力。
4.2 前端开发实践操作
4.2.1 用户界面设计原则
用户界面(UI)设计是前端开发中的重要环节,需要遵循一系列设计原则,以确保创建出直观、易用和吸引人的用户界面。以下是一些基本的设计原则:
一致性
界面元素(如按钮、字体、颜色等)应该在整个应用中保持一致,以减少用户的学习成本。
反馈
用户的所有操作都应得到及时和明确的反馈。例如,按钮在被点击时应该有视觉变化,操作错误应提供相应的提示信息。
简洁性
界面不应过于复杂,应避免信息过载。关键信息和操作应该突出显示,并且布局要清晰有序。
可用性
用户界面应该直观易用,即使是没有经验的用户也能轻松上手。
适应性
界面需要能够适应不同的屏幕尺寸和分辨率,确保在各种设备上提供良好的用户体验。
为了实现这些原则,前端开发人员通常需要与UI/UX设计师紧密合作,将设计原型转化为实际的代码实现。开发者不仅要编写能够实现设计效果的代码,还要确保这些代码具备良好的性能和兼容性。
4.2.2 前端框架与库的运用
随着现代Web应用复杂性的增加,前端框架和库逐渐成为开发中不可或缺的部分。框架和库提供了一系列预定义的组件和模式,帮助开发者更快地构建高质量的应用程序。以下是目前前端领域中几个最流行的框架和库:
React
React是由Facebook开发的用于构建用户界面的JavaScript库。它采用了虚拟DOM技术,只在必要时更新真实DOM,从而提高性能。React组件化的设计思想使得代码易于复用和维护。
Angular
Angular是一个由Google支持的前端框架。它使用TypeScript作为开发语言,提供了一套完整的解决方案,包括模板、数据绑定、依赖注入等。Angular框架具备强大的功能,适合构建复杂的单页应用(SPA)。
Vue.js
Vue.js是一个渐进式JavaScript框架,被设计为易于上手和集成。Vue的核心库只关注视图层,使得它在实现小型组件和功能时更为灵活。
前端模块打包器(Bundlers)
现代前端项目通常依赖于npm或yarn来管理项目依赖,并使用模块打包器如Webpack来组织和打包项目文件。打包器可以处理各种静态资源,如图片、字体和样式表,并优化输出的文件,以减少HTTP请求的数量和提升加载速度。
CSS预处理器
预处理器如Sass和Less提供了更加强大的CSS功能,比如变量、函数和混合(mixins),使得编写CSS更为高效和可维护。
4.2.3 前后端数据交互实现
前后端数据交互是现代Web应用的关键部分。前端通常通过AJAX(Asynchronous JavaScript and XML)技术与后端服务进行通信。以下是实现前后端数据交互的一些常用技术:
AJAX请求
利用XMLHttpRequest或Fetch API发起异步HTTP请求,并处理来自服务器的响应。Fetch API为网络请求提供了更强大和灵活的控制能力。
fetch('https://api.example.com/data')
.then(response => response.json())
.then(data => console.log(data))
.catch(error => console.error('Error:', error));
WebSockets
WebSockets提供了一个持久化的网络连接,允许服务器和客户端之间进行全双工通信。这种方式非常适合实时数据交换,如聊天应用或游戏。
RESTful API
REST(Representational State Transfer)是一种软件架构风格,它定义了如何构建网络应用。在RESTful架构中,服务器提供资源的表示,客户端通过HTTP方法(GET, POST, PUT, DELETE)进行操作。
GraphQL
GraphQL是一种查询语言,允许客户端精确地指定它们需要哪些数据。与REST不同,GraphQL不是一套架构风格,而是一种在API层面的解决方案。它能够减少数据传输,并允许客户端执行更复杂的查询。
在前后端数据交互实现时,开发者需要考虑安全性、性能和容错性等因素,确保数据交互过程中的数据完整性和用户隐私。通过选择合适的通信技术和协议,可以构建出响应快速、用户友好的Web应用。
5. 后端开发:数据处理与控制算法
5.1 数据处理基础
5.1.1 数据收集与预处理
在嵌入式系统中,数据处理是至关重要的一步。数据收集通常涉及传感器,这些传感器能够实时捕获各种环境数据,如温度、压力、位置等。预处理是数据处理的第一步,其中包括数据清洗、数据格式转换和数据规范化等操作。数据清洗是指去除噪声和不一致的数据,提高数据的质量。数据格式转换确保数据可以被后端系统正确解析。数据规范化是将不同格式的数据转化为统一的标准格式,便于后续处理。
# 示例:Python代码段进行数据预处理
import pandas as pd
# 假设从传感器读取的数据存储在CSV文件中
data = pd.read_csv('sensor_data.csv')
# 数据清洗:去除缺失值
cleaned_data = data.dropna()
# 数据格式转换:将字符串时间戳转换为时间格式
cleaned_data['timestamp'] = pd.to_datetime(cleaned_data['timestamp'])
# 数据规范化:规范化数据格式,例如温度数据统一为摄氏度
cleaned_data['temperature_celsius'] = cleaned_data['temperature'].apply(lambda x: (x - 32) * 5.0/9.0)
5.1.2 数据存储与管理
经过预处理的数据需要被存储和管理,以便于查询和分析。在嵌入式系统中,数据库的选择通常会考虑资源占用、存储容量和访问速度等因素。常见的嵌入式数据库包括SQLite、Berkeley DB等轻量级解决方案。数据管理还涉及到数据库的维护,包括备份、恢复和优化等操作。
-- 示例:SQLite数据库创建表并插入数据
CREATE TABLE sensor_readings (
id INTEGER PRIMARY KEY AUTOINCREMENT,
timestamp TIMESTAMP,
temperature REAL,
humidity REAL
);
-- 插入数据
INSERT INTO sensor_readings (timestamp, temperature, humidity) VALUES (datetime('now'), 24.5, 55.0);
5.2 控制算法实现
5.2.1 控制理论基础
控制算法是嵌入式系统的核心,它决定了系统的动态行为和性能。控制理论为实现各种控制策略提供了理论基础。基本的控制理论包括开环控制和闭环控制。闭环控制,也称为反馈控制,是更常见的一种方式,能够根据输出和期望输出的差异调整系统行为,提高系统的稳定性和准确性。
5.2.2 控制算法在嵌入式系统中的应用
在嵌入式系统中,控制算法经常用于机器人导航、无人机稳定、自动化工厂控制等领域。使用如PID(比例-积分-微分)控制器是最常见的控制策略之一。PID控制器通过调整比例、积分和微分的参数,以实现精确控制。
// 示例:C语言实现简单的PID控制器
struct PID_Controller {
float Kp; // 比例系数
float Ki; // 积分系数
float Kd; // 微分系数
float setpoint; // 设定目标值
float integral; // 积分累计
float prev_error; // 上一次的误差
};
float pid_update(struct PID_Controller *pid, float current_value, float dt) {
float error = pid->setpoint - current_value;
pid->integral += error * dt;
float derivative = (error - pid->prev_error) / dt;
float output = pid->Kp * error + pid->Ki * pid->integral + pid->Kd * derivative;
pid->prev_error = error;
return output;
}
控制算法的实现和调整需要深厚的理论知识和实践经验,对于不同应用场景需要仔细选择和调整PID参数,确保系统的稳定性和响应速度。在实际应用中,还可能涉及更复杂的控制策略,如模糊逻辑控制、神经网络控制等。
简介:ROS系统为机器人硬件抽象、软件通信、进程管理等提供统一框架。本资料包将指导如何在ROS环境下进行嵌入式系统的前后端开发,涵盖ROS基础、嵌入式系统原理、ROS与嵌入式结合策略、前端可视化界面实现、后端数据处理和控制算法。同时,以北京航空航天大学2019年嵌入式软件项目为例,提供代码示例、实验指导和项目报告,帮助学习者深入理解ROS环境下的嵌入式开发。

















 49
49

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









