






文章目录
一、ROS动作编程: 客户端发送一个运动目标,模拟机器人运动到目标位置的过程
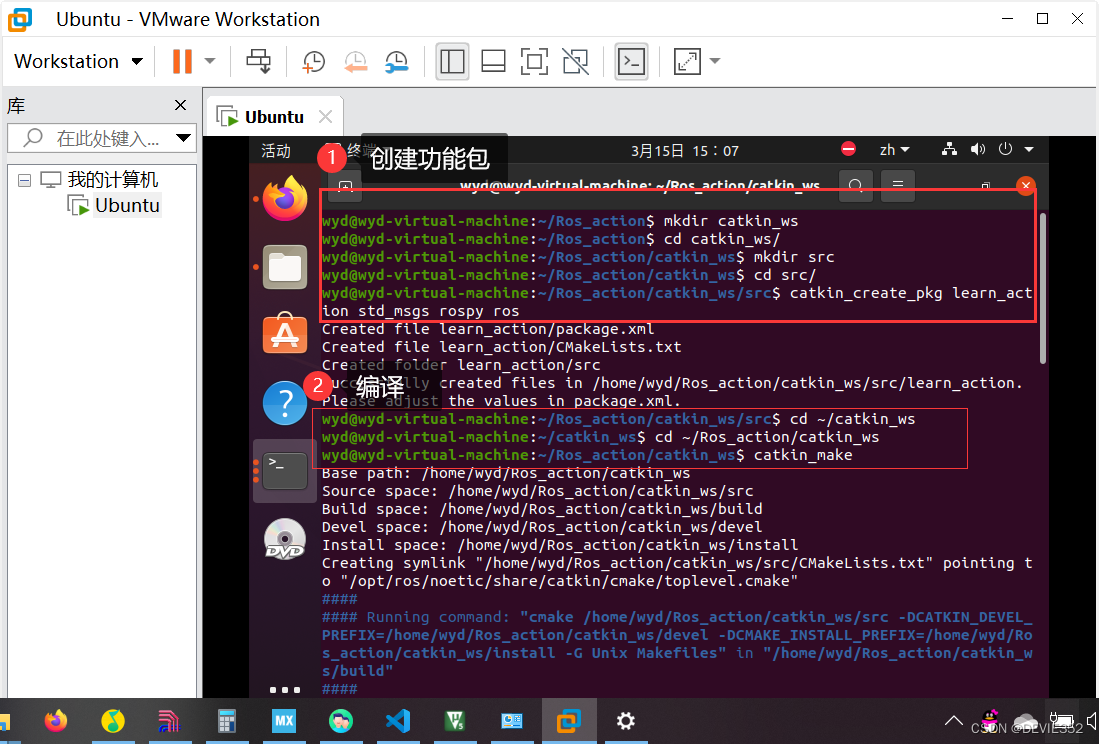
1.创建工作区间
2.定义action文件
在learn_action文件下创建action文件,在action文件下创建TurtleMove.action文件,并在TurtleMove.action文件内输入代码:
# Define the goal
float64 turtle_target_x
# Specify Turtle's target position
float64 turtle_target_y
float64 turtle_target_theta
---
# Define the result
float64 turtle_final_x
float64 turtle_final_y
float64 turtle_final_theta
---
# Define a feedback message
float64 present_turtle_x
float64 present_turtle_y
float64 present_turtle_theta

3.创建cpp文件
在learn_action的src文件夹下,创建TurtleMove_server.cpp文件和TurtleMove_client.cpp文件
//TurtleMove_server.cpp
/*
此程序通过通过动作编程实现由client发布一个目标位置
然后控制Turtle运动到目标位置的过程
*/
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionServer<learn_action::TurtleMoveAction> Server;
struct Myturtle
{
float x;
float y;
float theta;
}turtle_original_pose,turtle_target_pose;
ros::Publisher turtle_vel;
void posecallback(const turtlesim::PoseConstPtr& msg)
{
ROS_INFO("Turtle1_position:(%f,%f,%f)",msg->x,msg->y,msg->theta);
turtle_original_pose.x=msg->x;
turtle_original_pose.y=msg->y;
turtle_original_pose.theta=msg->theta;
}
// 收到action的goal后调用该回调函数
void execute(const learn_action::TurtleMoveGoalConstPtr& goal, Server* as)
{
learn_action::TurtleMoveFeedback feedback;
ROS_INFO("TurtleMove is working.");
turtle_target_pose.x=goal->turtle_target_x;
turtle_target_pose.y=goal->turtle_target_y;
turtle_target_pose.theta=goal->turtle_target_theta;
geometry_msgs::Twist vel_msgs;
float break_flag;
while(1)
{
ros::Rate r(10);
vel_msgs.angular.z = 4.0 * (atan2(turtle_target_pose.y-turtle_original_pose.y,
turtle_target_pose.x-turtle_original_pose.x)-turtle_original_pose.theta);
vel_msgs.linear.x = 0.5 * sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) +
pow(turtle_target_pose.y-turtle_original_pose.y, 2));
break_flag=sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) +
pow(turtle_target_pose.y-turtle_original_pose.y, 2));
turtle_vel.publish(vel_msgs);
feedback.present_turtle_x=turtle_original_pose.x;
feedback.present_turtle_y=turtle_original_pose.y;
feedback.present_turtle_theta=turtle_original_pose.theta;
as->publishFeedback(feedback);
ROS_INFO("break_flag=%f",break_flag);
if(break_flag<0.1) break;
r.sleep();
}
// 当action完成后,向客户端返回结果
ROS_INFO("TurtleMove is finished.");
as->setSucceeded();
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "TurtleMove_server");
ros::NodeHandle n,turtle_node;
ros::Subscriber sub = turtle_node.subscribe("turtle1/pose",10,&posecallback); //订阅小乌龟的位置信息
turtle_vel = turtle_node.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);//发布控制小乌龟运动的速度
// 定义一个服务器
Server server(n, "TurtleMove", boost::bind(&execute, _1, &server), false);
// 服务器开始运行
server.start();
ROS_INFO("server has started.");
ros::spin();
return 0;
}
//TurtleMove_client.cpp
#include <actionlib/client/simple_action_client.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionClient<learn_action::TurtleMoveAction> Client;
struct Myturtle
{
float x;
float y;
float theta;
}turtle_present_pose;
// 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,
const learn_action::TurtleMoveResultConstPtr& result)
{
ROS_INFO("Yay! The TurtleMove is finished!");
ros::shutdown();
}
// 当action激活后会调用该回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
// 收到feedback后调用该回调函数
void feedbackCb(const learn_action::TurtleMoveFeedbackConstPtr& feedback)
{
ROS_INFO(" present_pose : %f %f %f", feedback->present_turtle_x,
feedback->present_turtle_y,feedback->present_turtle_theta);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "TurtleMove_client");
// 定义一个客户端
Client client("TurtleMove", true);
// 等待服务器端
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
// 创建一个action的goal
learn_action::TurtleMoveGoal goal;
goal.turtle_target_x = 1;
goal.turtle_target_y = 1;
goal.turtle_target_theta = 0;
// 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
}

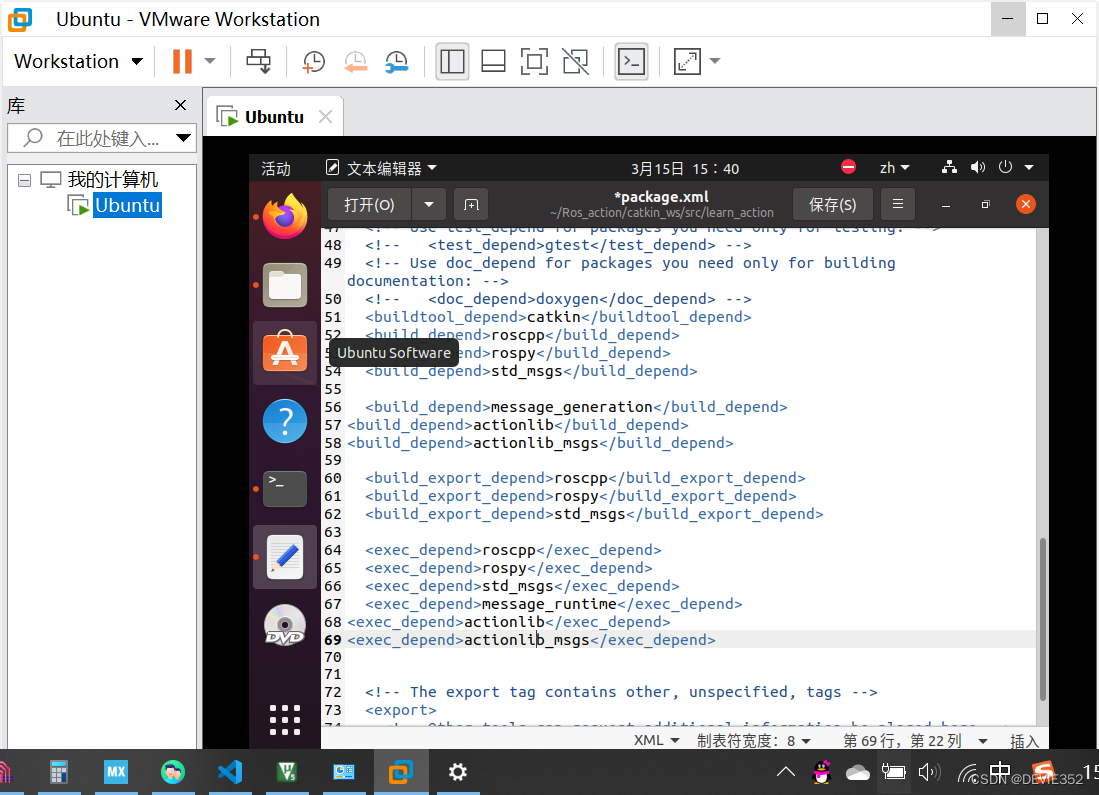
4.修改文件
修改package.xml文件
修改CmakeLists.txt文件



并在文件末尾添加
add_executable(TurtleMove_client src/TurtleMove_client.cpp)
target_link_libraries(TurtleMove_client ${catkin_LIBRARIES})
add_dependencies(TurtleMove_client ${PROJECT_NAME}_gencpp)
add_executable(TurtleMove_server src/TurtleMove_server.cpp)
target_link_libraries(TurtleMove_server ${catkin_LIBRARIES})
add_dependencies(TurtleMove_server ${PROJECT_NAME}_gencpp)
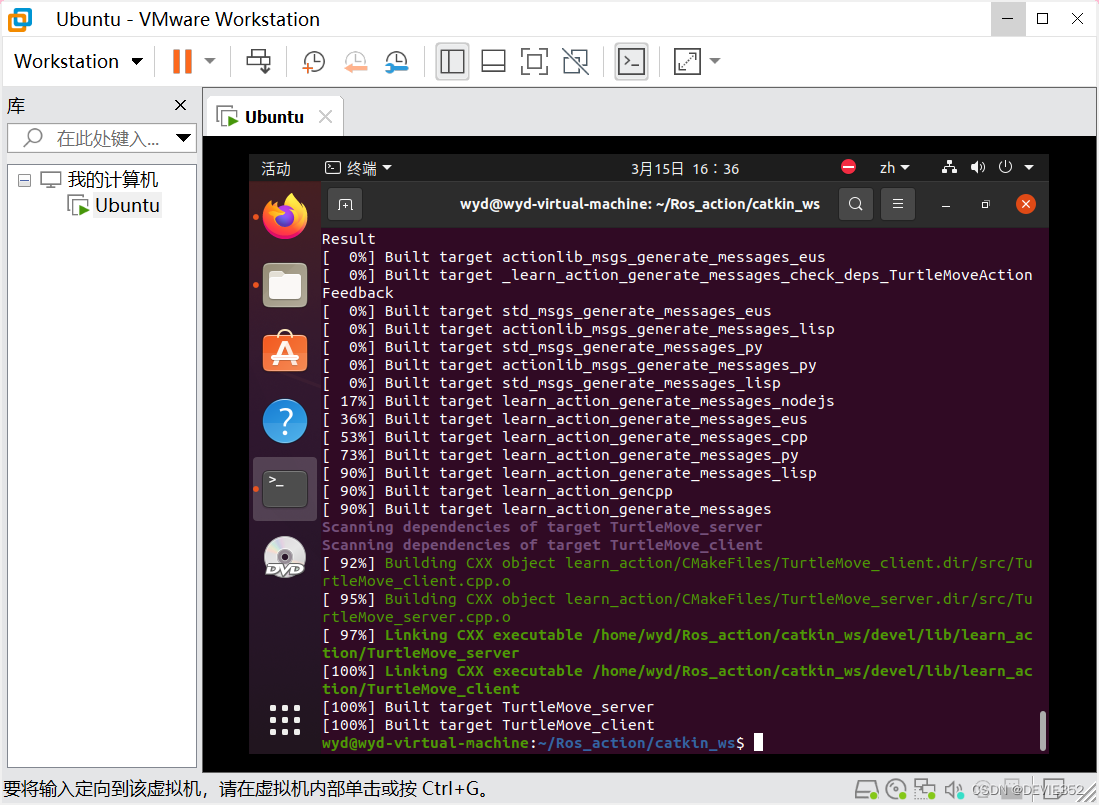
5.编译程序
cd ~/catkin_ws
catkin_make
6.运行程序
设置环境变量,启动ros核心
source ~/catkin_ws/devel/setup.bash
roscore
新建终端,运行小海龟
source ~/catkin_ws/devel/setup.bash
rosrun turtlesim turtlesim_node

新建终端,运行TurtleMove_server.cpp
source ./devel/setup.bash
rosrun learn_action TurtleMove_server
新建终端,运行TurtleMove_client.cpp
source ./devel/setup.bash
rosrun learn_action TurtleMove_client


二、在Ubuntu系统下安装图像处理开源软件库 Opencv并练习编译
(一)、安装OpenCV
1.下载安装包:
https://codeload.github.com/opencv/opencv/zip/refs/tags/3.4.11
2.解压缩
下载好后,可以在文件夹中看见被下载好的压缩包文件,在终端打开该路径,使用指令解压:
unzip opencv-3.4.11.zip
进入解压后的文件夹:opencv-3.4.11
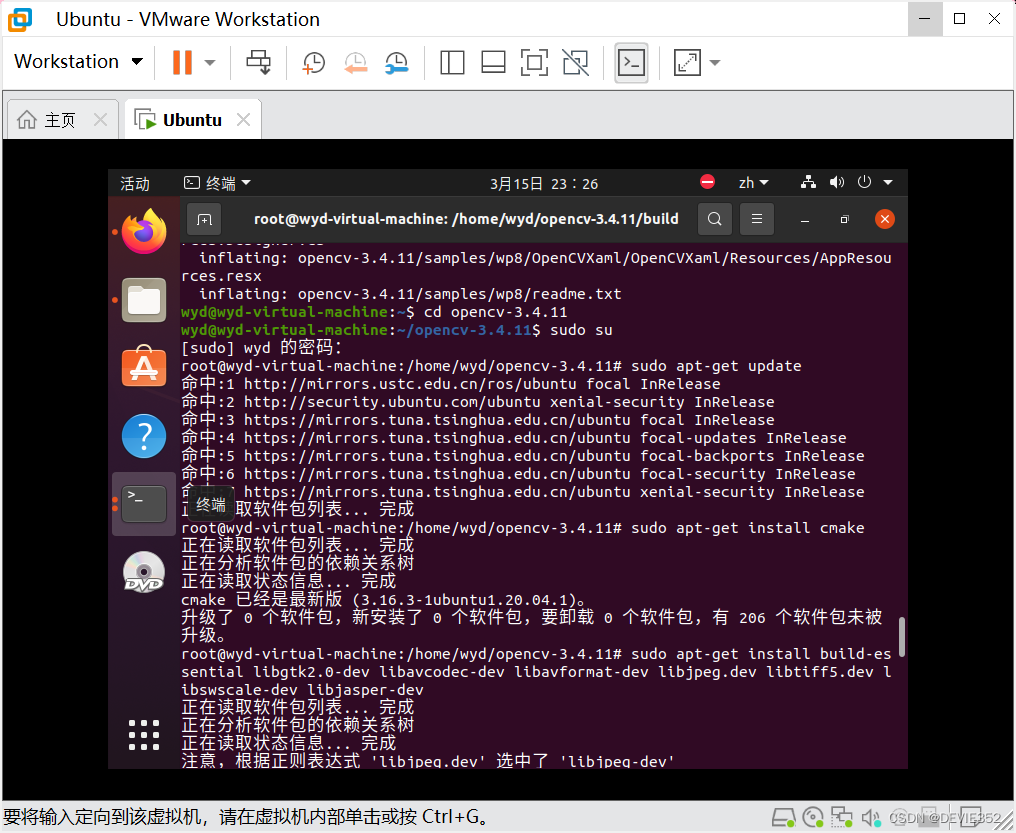
cd opencv-3.4.11
进入 root 用户,并更新一下。
sudo su
sudo apt-get update
3.下载cmake并完成配置
sudo apt-get install cmake
安装依赖库
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff5.dev libswscale-dev libjasper-dev
创建文件build,并进入
mkdir build
cd build
使用 cmake 编译参数,或者使用第二条默认参数,都可以的。
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
cmake ..
4.make编译
在build文件夹下
sudo make
sudo make -j4//如果你想更快编译完,可以使用命令:sudo make -j4 ,而 -j4 表示使用 4 个线程进行编译。

安装
sudo make install
5.配置环境
修改 opencv.conf 文件,打开后的文件是空的,添加 opencv 库的安装路径:/usr/local/lib
更新系统共享链接库
sudo ldconfig
配置 bash ,修改 bash.bashrc 文件
sudo gedit /etc/bash.bashrc
在文件末尾加入
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
保存退出,然后执行如下命令使得配置生效:
source /etc/bash.bashrc
更新
sudo updatedb
//确保安装了mlocate
命令:apt-get install mlocate
接下来查看 opencv 的版本信息。
pkg-config --modversion opencv
以上即配置成功。
(二)、展示图片
1.创建文件
创建文件夹code
mkdir code
cd code
在code文件夹中创建test1.cpp
gedit test1.cpp
写入下列代码
#include <opencv2/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
CvPoint center;
double scale = -3;
IplImage* image = cvLoadImage("lena.jpg");
argc == 2? cvLoadImage(argv[1]) : 0;
cvShowImage("Image", image);
if (!image) return -1; center = cvPoint(image->width / 2, image->height / 2);
for (int i = 0;i<image->height;i++)
for (int j = 0;j<image->width;j++) {
double dx = (double)(j - center.x) / center.x;
double dy = (double)(i - center.y) / center.y;
double weight = exp((dx*dx + dy*dy)*scale);
uchar* ptr = &CV_IMAGE_ELEM(image, uchar, i, j * 3);
ptr[0] = cvRound(ptr[0] * weight);
ptr[1] = cvRound(ptr[1] * weight);
ptr[2] = cvRound(ptr[2] * weight);
}
Mat src;Mat dst;
src = cvarrToMat(image);
cv::imwrite("test.png", src);
cvNamedWindow("test",1); imshow("test", src);
cvWaitKey();
return 0;
}
2.编译执行
g++ test1.cpp -o test1 `pkg-config --cflags --libs opencv`
//使用 pkg-config 时,选项 --cflags 它是用来指定程序在编译时所需要头文件所在的目录,选项 --libs 则是指定程序在链接时所需要的动态链接库的目录
在code中放入图片命名为lena.jpg

3.运行
./test1


(三)、使用opencv库编写打开摄像头压缩视频的程序
1.虚拟机获取摄像头权限
●使用快捷键 Win + R ,输入 services.msc ,并回车
●找到 VMware USB Arbitration S… 服务,确保启动了。

●点击 “ 虚拟机 ” ,然后点击 “ 设置(S)… ”。
选择 “ USB控制器 ” ,将 “ USB兼容性 ” 设置为 “ USB 3.1 ” ,并点击确定。
●选择 “ 虚拟机 ” ,再选择 “ 可移动设备 ” ,再选择 “ Quanta USB2.0 VGA UVC WebCam ” ,最后点击 “ 连接 ” ,再弹出的窗口内点击 “ 确定 ” 。
● 虚拟机右下角这个摄像头图标有个小绿点,则连接成功。

2.播放视频
创建test2.cpp
gedit test2.cpp
写入代码
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
//从摄像头读取视频
VideoCapture capture("man.mp4");
//循环显示每一帧
while(1){
Mat frame;//定义一个Mat变量,用于存储每一帧的图像
capture >> frame;//读取当前帧
if(frame.empty())//播放完毕,退出
break;
imshow("读取视频帧",frame);//显示当前帧
waitKey(30);//掩饰30ms
}
system("pause");
return 0;
}
在文件夹中放入视频编译运行
g++ test2.cpp -o test2 `pkg-config --cflags --libs opencv`
./test2
3.录制视频
创建test3.cpp
gedit test3.cpp
写入代码
/*********************************************************************
打开电脑摄像头,空格控制视频录制,ESC退出并保存视频RecordVideo.avi
*********************************************************************/
#include<iostream>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace cv;
using namespace std;
int main()
{
//打开电脑摄像头
VideoCapture cap(0);
if (!cap.isOpened())
{
cout << "error" << endl;
waitKey(0);
return 0;
}
//获得cap的分辨率
int w = static_cast<int>(cap.get(CV_CAP_PROP_FRAME_WIDTH));
int h = static_cast<int>(cap.get(CV_CAP_PROP_FRAME_HEIGHT));
Size videoSize(w, h);
VideoWriter writer("RecordVideo.avi", CV_FOURCC('M', 'J', 'P', 'G'), 25, videoSize);
Mat frame;
int key;//记录键盘按键
char startOrStop = 1;//0 开始录制视频; 1 结束录制视频
char flag = 0;//正在录制标志 0-不在录制; 1-正在录制
while (1)
{
cap >> frame;
key = waitKey(100);
if (key == 32)//按下空格开始录制、暂停录制 可以来回切换
{
startOrStop = 1 - startOrStop;
if (startOrStop == 0)
{
flag = 1;
}
}
if (key == 27)//按下ESC退出整个程序,保存视频文件到磁盘
{
break;
}
if (startOrStop == 0 && flag==1)
{
writer << frame;
cout << "recording" << endl;
}
else if (startOrStop == 1)
{
flag = 0;
cout << "end recording" << endl;
}
imshow("picture", frame);
}
cap.release();
writer.release();
destroyAllWindows();
return 0;
}
编译运行
g++ test3.cpp -o test3 `pkg-config --cflags --libs opencv`
./test3

空格开始录制,esc键录制结束。
生成了一个.avi的文件,就是录制的视频

如果要求打开你硬盘上一个视频文件来播放,请问示例代码1第7行代码如何修改?
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
//从摄像头读取视频
VideoCapture capture("man.mp4");//VideoCapture capture(0);打开man.mp4视频文件
//循环显示每一帧
while(1){
Mat frame;//定义一个Mat变量,用于存储每一帧的图像
capture >> frame;//读取当前帧
if(frame.empty())//播放完毕,退出
break;
imshow("读取视频帧",frame);//显示当前帧
waitKey(30);//掩饰30ms
}
system("pause");
return 0;
}
在示例代码1第9行的while循环中,Mat是一个什么数据结构? 为什么一定要加一句waitKey延时代码,删除它行不行?
while循环体中的 Mat 数据结构其实是一个点阵,对应图像上的每一个点,点的集合形成了一帧图像。语句:waitKey(30) ,中的参数● 单位是 ms 毫秒,也就是每一帧间隔 30ms,该语句时不能删除的,否则会执行错误,无法播放视频或录制视频。
示例代码1代码会在while循环中一直运行,你如果试图用鼠标关闭图像显示窗口,会发现始终关不掉。需要用键盘Ctrl+C 强制中断程序,非常不友好。
因此进行改进代码如下:
#include <opencv2/opencv.hpp>
using namespace cv;
int main()
{
VideoCapture capture(0);
while(1)
{
Mat frame;
capture >> frame;
imshow("读取视频帧",frame);
if(frme.empt())//
{
break;
}//
waitKey(30);
}
system("pause");
return 0;
}
参考
https://blog.csdn.net/qq_52199251/article/details/127033489
https://blog.csdn.net/m0_49297422/article/details/120650257















 291
291











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









