







MotoSimEG-VRC(安川机器人虚拟仿真与离线编程软件)除了可以从外部导入三维数模以外,还可以导入二维数模,支持导入的二维数模格式为DXF。一般情况下,导入的二维数模都是作为机器人工作站的设备布局草图,用于前期机器人工作站设备摆放布局的位置参考。但是,MotoSimEG-VRC软件与DELMIA、Robotstudio、PD/PS等仿真软件不同,它在导入二维布局图的时候需要注意一些事项,本期就来为大家介绍一下。
圆形布局参考图形元素处理
与其他机器人虚拟仿真软件不同,MotoSimEG-VRC软件内置的参考特征拾取工具只能拾取参考图元的端点,而不能直接拾取参考图元端点以外的特征,比如圆形的圆心点、矩形的中心点等。对于一个完整的圆形图元来讲,它是不存在端点的,因此,我们要在布局图中人为地为圆形图元添加出带有端点的参考图元。下面以机器人安装底座为例,介绍圆形图元拾取参考端点的添加。
首先,用AutoCAD软件打开布局图,然后过机器人安装底座投影出的圆形圆心点绘制两条相互垂直的线段(图中红色线段)。
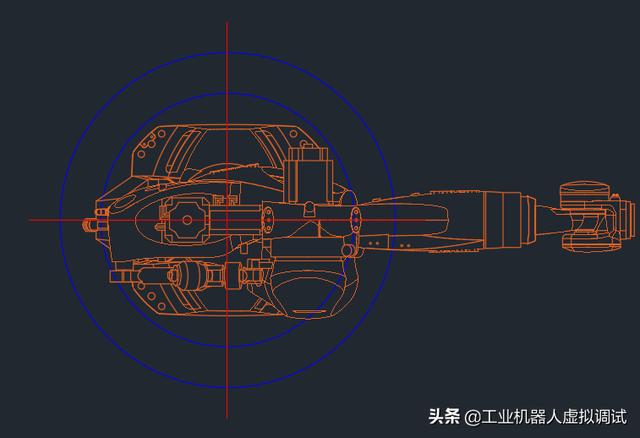
使用AutoCAD软件中的BR命令(打断),对绘制的两条线段进行打断操作。打断操作中选取的打断对象为刚刚绘制的线段;第一个打断点、第二个打断点为同一点,均
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2265
2265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









